纺织学报 ›› 2019, Vol. 40 ›› Issue (12): 127-133.doi: 10.13475/j.fzxb.20181203707
袁汝旺1,2( ), 祝雷雷1,2, 吕雪奎3, 杨佳敏3
), 祝雷雷1,2, 吕雪奎3, 杨佳敏3
YUAN Ruwang1,2(), ZHU Leilei1,2, LÜ Xuekui3, YANG Jiamin3
摘要:
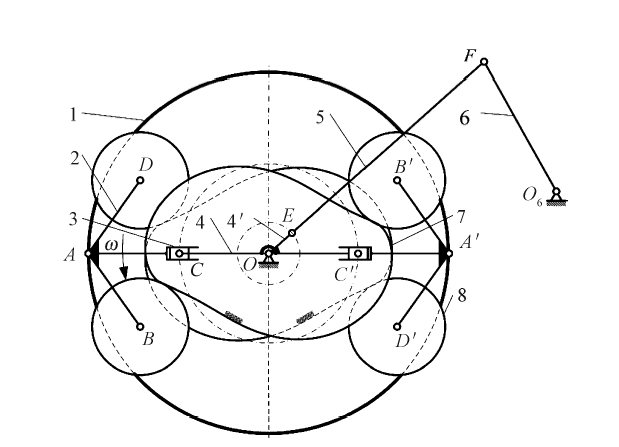
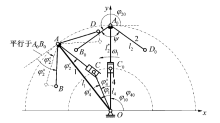
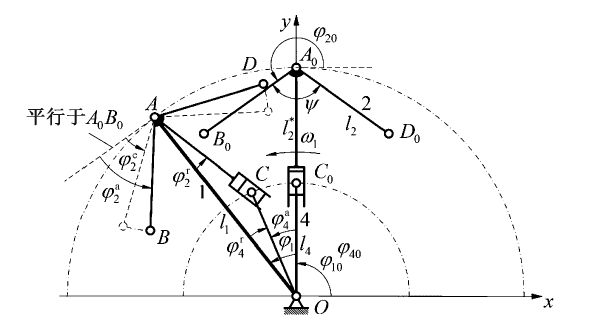
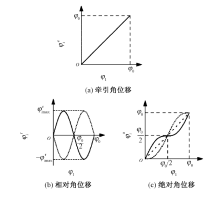
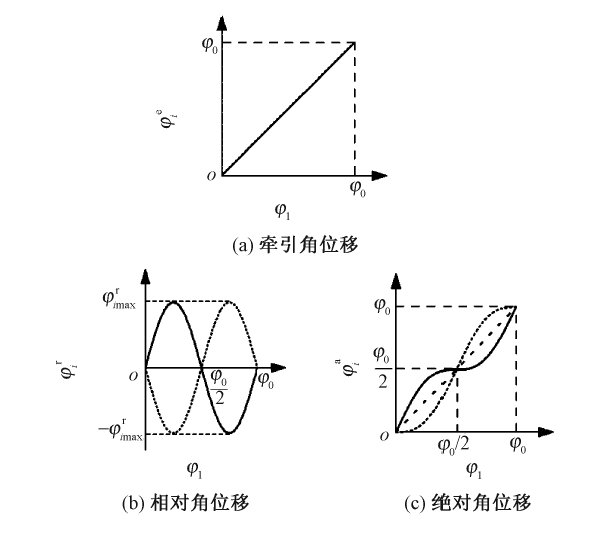
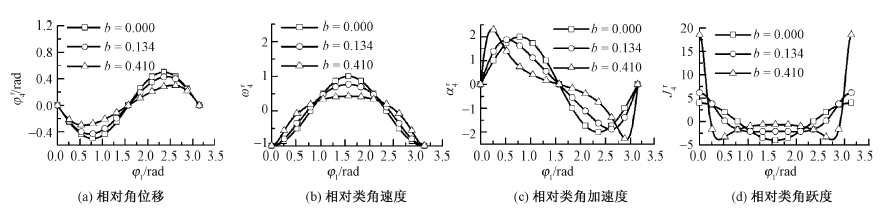
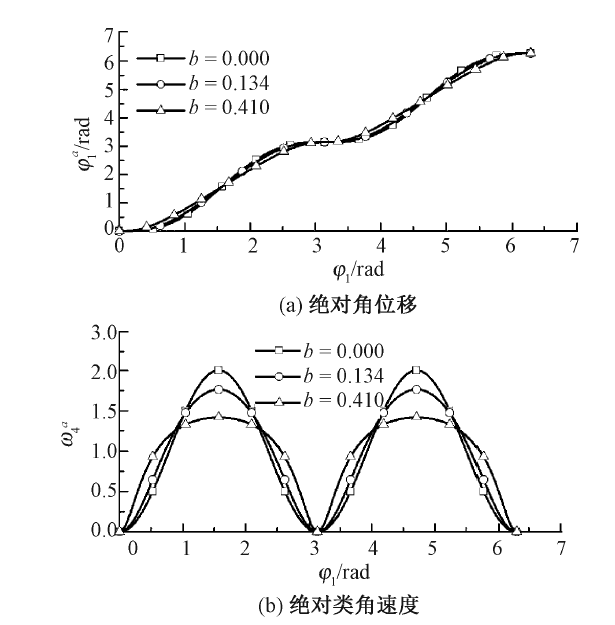
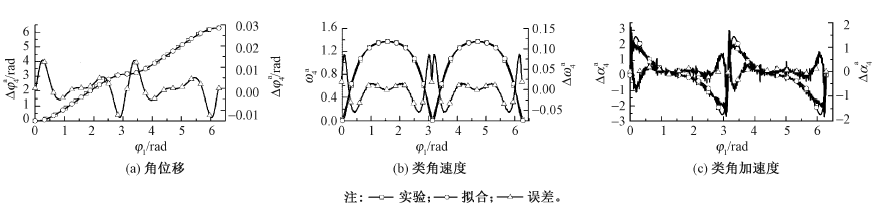
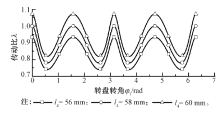
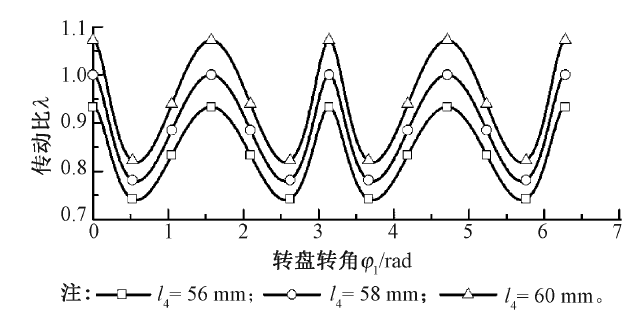
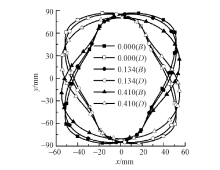
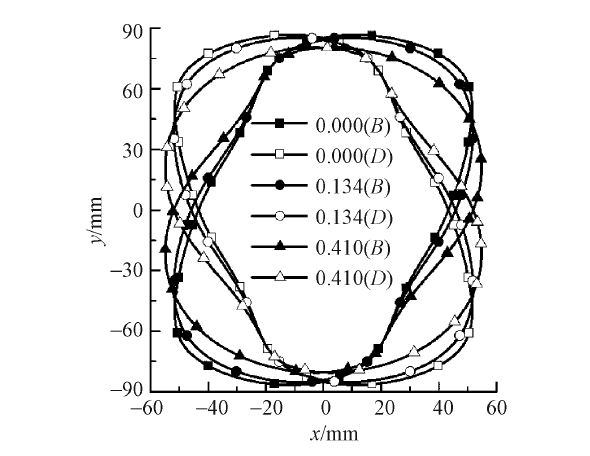
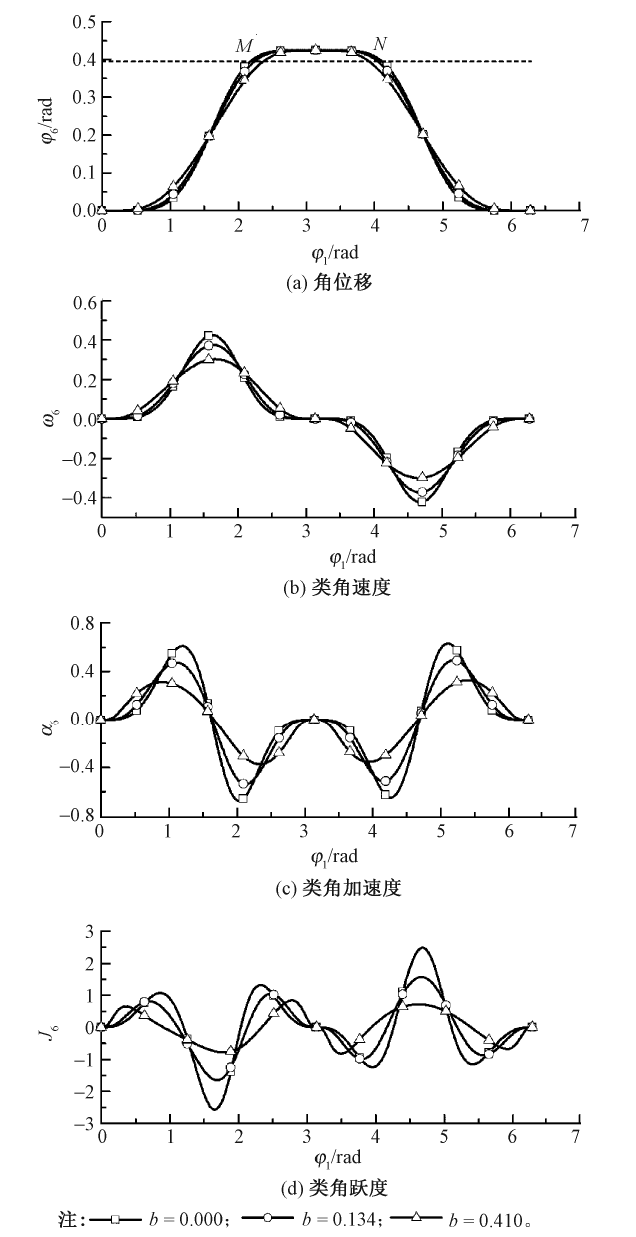
针对电子多臂开口对不同织造工艺的适应性问题,分析旋转变速机构构型及其运动特性,从运动合成角度提出基于固定凸轮-滑块的旋转变速机构运动学分析与设计方法,建立适于产品系列化设计的旋转变速疏密化正弦运动规律模型及其相对运动传动模型,探讨连杆参数变化对机构性能与开口工艺的影响。结果表明:转子臂与偏心连杆相对运动为近似等角速比传动,提综臂运动特征值由0.000开始连续变化无突变;随疏密化调节系数增加,凸轮廓线、压力角、曲率半径、提综臂运动特征值及其相对主轴静止时间均减小;合理选择疏密化调节系数获得加速度或扭矩最优运动规律,可满足不同织造工艺需求,并为电子多臂机系列化设计提供理论基础与技术参考。
中图分类号:
| [1] | 葛正浩, 张凯, 张双琳. 共轭凸轮开口机构的反求设计及动力学研究[J]. 机械设计, 2017,34(12):65-68. |
| GE Zhenghao, ZHANG Kai, ZHANG Shuanglin. Reverse design and dynamics research of conjugate cam shedding mechanism[J]. Journal of Machine Design, 2017,34(12):65-68. | |
| [2] | EREN R, ÖZKAN G, KARAHAN M. Comparison of heald frame motion generated by rotary dobby and crank & cam shedding motions[J]. Fibres & Textiles in Eastern Europe, 2005,13(4):78-83. |
| [3] | CAN Ö, ABDULLA G. Design of a new dobby drive mechanism[J]. SDU Journal of Technical Sciences, 2014,4(1):32-34. |
| [4] | ABDULLA G, HASCELIK B, PALAMUTCU S, et al. Synjournal work about driving mechanism of a novel rotary dobby mechanism[J]. Tekstil ve Konfeksiyon, 2010,20(3):218-224. |
| [5] | EREN R, ÖZKAN G, TURHAN Y. Kinematics of rotary dobby and analysis of heald frame motion in weaving process[J]. Textile Research Journal, 2008,78(12):1070-1079. |
| [6] | HSIEH W. An experimental study on cam-controlled planetary gear trains[J]. Mechanism & Machine Theory, 2007,42(5):513-525. |
| [7] | FUMEX A, PAGES J P. Modulator mechanism for dobby: US, 5107901 [P]. 1992-04-28. |
| [8] | HSIEH W. Kinematic synjournal of cam-controlled plane- tary gear trains[J]. Mechanism & Machine Theory, 2009,44(5):873-895. |
| [9] | GUHA A, AMARNATH C, KURIEN I K, et al. Linkage driven dobby with dwell[J]. Textile Research Journal, 2009,79(9):804-809. |
| [10] | GABIL A, GAMZE S, BILAL R, et al. Research of design's parameters of drive mechanism of RA14 dobby and development of the drive mechanism[J]. Annals of the University of Oradea Fascicle of Textiles Leatherwork, 2013,14(1):38-42. |
| [11] | SOONGR . A new cam-geared mechanism for exact path generation[J]. Journal of Advanced Mechanical Design Systems and Manufacturing, 2015,9(2).DOI: 10.1299/jamdsm.2015jamdsm0020. |
| [12] | ALA D M, ÇELIK N. Alternative shedding mechanisms designed for a sampling loom[J]. Journal of Textiles and Engineer, 2016,23(103):182-188. |
| [13] | 刘国栋, 智川, 张曼, 等. 固定凸轮的摆动从动件凸轮机构运动特性分析方法[J]. 机械设计, 2009,26(3):52-54. |
| LIU Guodong, ZHI Chuan, ZHANG Man, et al. Kinematic characteristic analysis method of cam mechanism with oscillating follower of fixed cam[J]. Journal of Machine Design, 2009,26(3):52-54. | |
| [14] | 季海彬, 周香琴, 成小军. 基于开口工艺要求的多臂机机构参数分析[J]. 浙江理工大学学报(自然科学版), 2016,35(2):205-210. |
| JI Haibin, ZHOU Xiangqin, CHENG Xiaojun. Analysis of dobby mechanism parameters based on opening process requirements[J]. Journal of Zhejiang Sci-Tech University (Natural Science Edition), 2016,35(2):205-210. | |
| [15] | 金国光, 魏晓勇, 魏展, 等. 旋转式多臂机提综机构动力学分析与优化[J]. 纺织学报, 2018,39(9):160-168. |
| JIN Guoguang, WEI Xiaoyong, WEI Zhan, et al. Dynamic analysis and optimization of rotary dobby lifting comprehensive mechanism[J]. Journal of Textile Research, 2018,39(9):160-168. | |
| [16] | 沈毅, 高大牛, 刘春雷. 基于ADAMS的GT421型多臂机机构动态仿真[J]. 纺织学报, 2012,33(8):119-123, 129. |
| SHEN Yi, GAO Daniu, LIU Chunlei. Dynamic simulation of mechanism of GT421 dobby based on ADMAS[J]. Journal of Textile Research, 2012,33(8):119-123, 129. | |
| [17] | 袁汝旺, 陈瑞, 蒋秀明, 等. 碳纤维多层织机打纬机构运动学分析与尺寸综合[J]. 纺织学报, 2017,38(11):137-142. |
| YUAN Ruwang, CHEN Rui, JIANG Xiuming, et al. Kinematics analysis and dimension synjournal of beating-up mechanism for carbon fiber multi-layer loom[J]. Journal of Textile Research, 2017,38(11):137-142. |
| [1] | 邱海飞. 3D打印技术在织机打纬−开口机构中的应用[J]. 纺织学报, 2017, 38(01): 140-146. |
| [2] | 沈毅, 高大牛, 刘春雷. 基于ADMAS的GT421型多臂机机构动态仿真[J]. 纺织学报, 2012, 33(8): 119-123. |
| [3] | 王钢飚;吴菁;陈宗农;陈天丰. 基于伺服电机的电子开口机构[J]. 纺织学报, 2009, 30(12): 117-120. |
| [4] | 崔鸿钧. 消极式凸轮开口机构回综分析[J]. 纺织学报, 2006, 27(8): 32-36. |
| [5] | 闭治跃;袁嫣红;李志祥;竺志超. 丰田电子开口机构原理分析及探讨[J]. 纺织学报, 2005, 26(3): 63-65. |
| [6] | 郑智毓. LW52型喷水织机开口、引纬测试分析[J]. 纺织学报, 2002, 23(06): 51-52. |
| [7] | 李伟. 片梭电子多臂机控制系统软件设计[J]. 纺织学报, 2002, 23(06): 57-59. |
| [8] | 吴伟听;李志祥. 新型电子开口的原理与分析[J]. 纺织学报, 2002, 23(04): 36-37. |
|
||
 京公网安备11010502044800号
京公网安备11010502044800号