纺织学报 ›› 2020, Vol. 41 ›› Issue (05): 50-57.doi: 10.13475/j.fzxb.20190506508
熊祥章1, 裴泽光1,2( ), 陈革1,2
), 陈革1,2
XIONG Xiangzhang1, PEI Zeguang1,2(), CHEN Ge1,2
摘要:
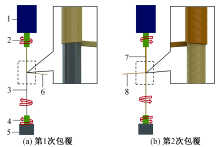
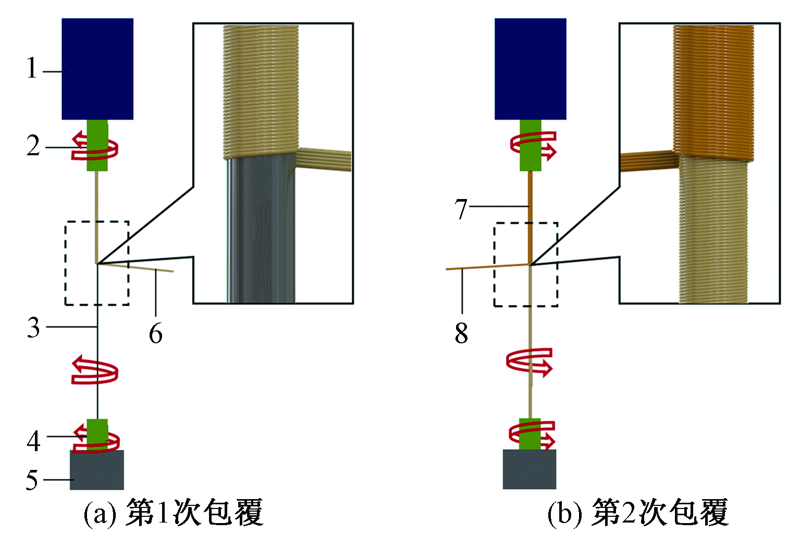
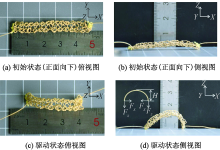
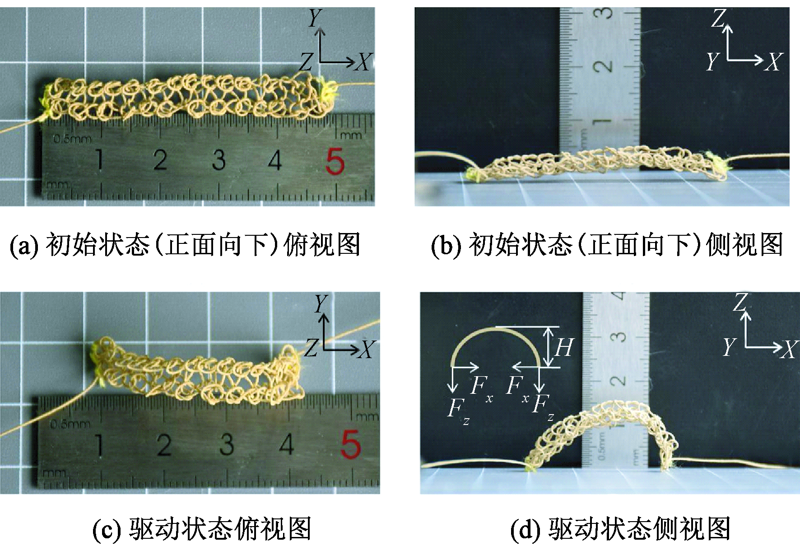
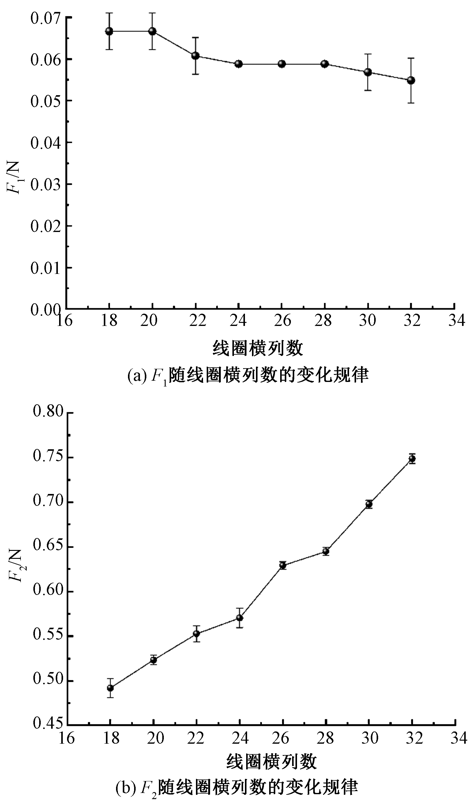
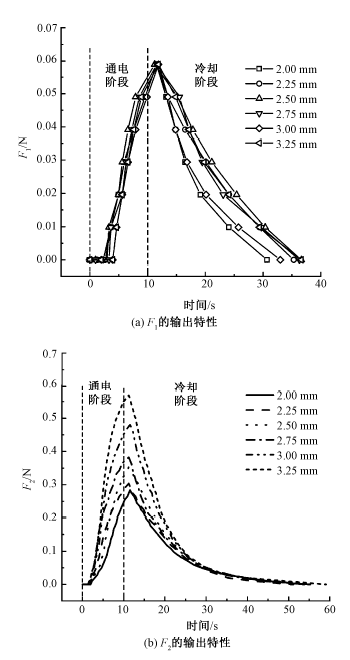
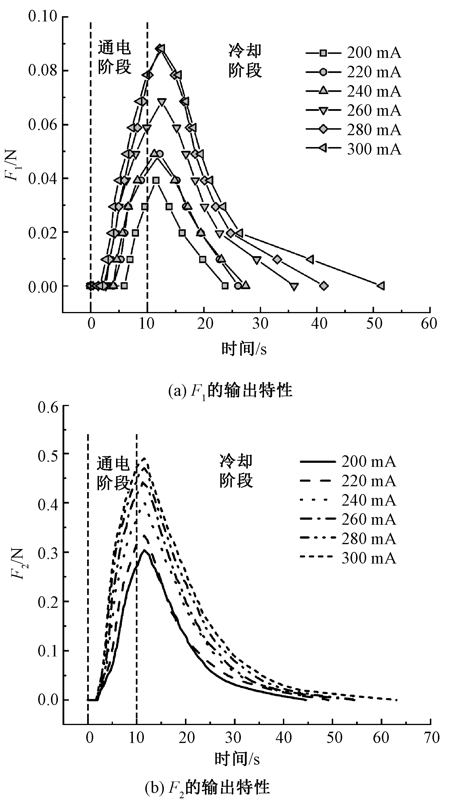
为构建面向软体机器人应用的织物基人工肌肉,设计并制备了1种以镍钛形状记忆合金丝为芯丝、芳纶复丝为外包纤维的包覆纱,利用该包覆纱制备了1种可通过电阻热驱动的纬平针织物致动器,研究了此致动器循环致动特性及其结构参数与致动条件对其致动特性的影响。研究结果表明:针织物致动器受驱动后将沿线圈纵行方向产生弯曲变形;当致动器线圈横列数增加时,其沿织物平面线圈纵行方向输出的致动力值将呈近似线性关系显著增加,而在垂直于织物平面方向输出的致动力略有减小;针织物致动器线圈尺寸的增加将使其沿织物平面内线圈纵行方向输出的致动力增加;致动电流值的增加将使致动器输出的致动力增大;针织物致动器具有稳定、快速的循环致动能力。
中图分类号:
| [1] |
HU W, LUM G Z, MASTRANGELI M, et al. Small-scale soft-bodied robot with multimodal locomotion[J]. Nature, 2018,554(7690):81-85.
doi: 10.1038/nature25443 pmid: 29364873 |
| [2] |
CHEN W, XIONG C, LIU C, et al. Fabrication and dynamic modeling of bidirectional bending soft actuator integrated with optical waveguide curvature sensor[J]. Soft Robotics, 2019,6(4):495-506.
doi: 10.1089/soro.2018.0061 pmid: 30907704 |
| [3] | HINES L, PETERSEN K, LUM G Z, et al. Soft actuators for small-scale robotics[J]. Advanced Materials, 2017,29(13):40-43. |
| [4] |
ZHAO G, SUN Z, GUO H, et al. Combination mechanism investigation on the muscle-like linear actuator using ionic polymer metal composites[J]. Polymer Composites, 2017,38(3):479-488.
doi: 10.1002/pc.v38.3 |
| [5] |
SHINTAKE J, CACUCCIOLO V, SHEA H, et al. Soft biomimetic fish robot made of dielectric elastomer actuators[J]. Soft Robotics, 2018,5(4):466-474.
doi: 10.1089/soro.2017.0062 pmid: 29957131 |
| [6] |
VOIT W, WARE T, DASARI R R, et al. High-strain shape-memory polymers[J]. Advanced Functional Materials, 2010,20(1):162-171.
doi: 10.1002/adfm.v20:1 |
| [7] | JIN H, DONG E, ALICI G, et al. A starfish robot based on soft and smart modular structure (SMS) actuated by SMA wires[J]. Bioinspiration & Biomimetics, 2016,11(5):10-12. |
| [8] | ELAHINIA M H. Shape memory alloy actuators: design, fabrication, and experimental evaluation[M]. Chichester:John Wiley & Sons Ltd, 2016: 1-14. |
| [9] | KIM H J, SONG S H, AHN S H. A turtle-like swimming robot using a smart soft composite (SSC) structure[J]. Smart Materials and Structures, 2012,22(1):7-14. |
| [10] | WANG W, LEE J-Y, RODRIGUE H, et al. Locomotion of inchworm-inspired robot made of smart soft compo-site (SSC)[J]. Bioinspiration & Biomimetics, 2014,9(4):40-46. |
| [11] |
HUANG X, KUMAR K, JAWED M K, et al. Highly dynamic shape memory alloy actuator for fast moving soft robots[J]. Advanced Materials Technologies, 2019. DOI: 10.1002/admt.201800540.
doi: 10.1002/admt.201600121 pmid: 31341947 |
| [12] | ABEL J, LUNTZ J, BREI D. Hierarchical architecture of active knits[J]. Smart Materials and Structures, 2013,22(12):47-51. |
| [13] | HAN M W, AHN S H. Blooming knit flowers: loop-linked soft morphing structures for soft robotics[J]. Advanced Materials, 2017,29(13):51-58. |
| [14] |
YOSHIMURA G, IWAKI N, SHINTAKU S, et al. Mechanical properties of covered yarn[J]. Journal of the Textile Machinery Society of Japan, 1970,16(3):77-87.
doi: 10.4188/jte1955.16.77 |
| [15] | LEXCELLENT C. Shape-memory alloys handbook[M]. Hoboken:John Wiley & Sons Inc, 2013: 3-12. |
| [16] | SPENCER D J. Knitting technology: a comprehensive handbook and practical guide[M]. Cambridge: Woodhead Publishing Ltd, 2001: 1-6. |
| [17] | 龙海如. 针织学[M]. 北京: 中国纺织出版社, 2008: 1-10. |
| LONG Hairu. Knitting science[M]. Beijing: China Textile & Apparel Press, 2008: 1-10. |
| [1] | 陈佳颖, 田旭, 彭晶晶, 方彤, 高伟洪. 针织物表面结构色的构建[J]. 纺织学报, 2020, 41(07): 117-121. |
| [2] | 尉腾祥, 李敏, 彭虹云, 付少海. 纬平针棉针织物平幅丝光条件与其线圈结构的关系[J]. 纺织学报, 2020, 41(04): 98-105. |
| [3] | 张佳慧, 王建萍. 圆形纬编针织物电极导电性能及电阻理论模型构建[J]. 纺织学报, 2020, 41(03): 56-61. |
| [4] | 王小艳, 杜金梅, 彭铃淇, 荆丽丽, 许长海. 涤纶针织物碱减量和染色一浴一步法工艺 [J]. 纺织学报, 2020, 41(01): 80-87. |
| [5] | 王秋平, 毛志平, 钟毅, 徐红, 张琳萍. 平幅轧染中针织物形变对染色的影响[J]. 纺织学报, 2019, 40(11): 94-99. |
| [6] | 杨恩惠, 邱华, 代文杰. 基于六边形网格结构的针织物三维建模[J]. 纺织学报, 2019, 40(11): 69-74. |
| [7] | 尉腾祥, 李敏, 彭虹云, 付少海. 纬平棉针织物双向拉伸线圈形态分析[J]. 纺织学报, 2019, 40(11): 64-68. |
| [8] | 何青青, 徐红, 毛志平, 张琳萍, 钟毅, 吕景春. 高导电性聚吡咯涂层织物的制备[J]. 纺织学报, 2019, 40(10): 113-119. |
| [9] | 林佳濛, 缪旭红, 万爱兰. 等离子体预处理对聚吡咯/涤纶经编导电织物结构和性能的影响[J]. 纺织学报, 2019, 40(09): 97-101. |
| [10] | 张帆, 张儒, 周文常, 周辉, 汪南方. 金属铜配合物催化双氧水用于棉针织物的低温漂白[J]. 纺织学报, 2019, 40(08): 101-108. |
| [11] | 徐成书, 吴梦婷, 任燕, 邢建伟, 蔡再生, 欧阳磊. 线性聚醚嵌段氨基硅油的制备及其性能[J]. 纺织学报, 2019, 40(08): 89-94. |
| [12] | 陶开鑫, 俞成丙, 侯颀骜, 吴聪杰, 刘引烽. 基于最小二乘支持向量机的棉针织物活性染料湿蒸染色预测模型[J]. 纺织学报, 2019, 40(07): 169-173. |
| [13] | 马振萍, 毛志平, 钟毅, 徐红. 单面纬平针织物平幅轧蒸染色防卷边控制[J]. 纺织学报, 2019, 40(05): 91-96. |
| [14] | 韩晓雪, 缪旭红. 氨纶纬编导电针织物纵向电力学性能[J]. 纺织学报, 2019, 40(04): 60-65. |
| [15] | 吴臣仁, 吕汪洋, 陈文兴. 铜配合物在棉针织物低温中性漂白中的应用[J]. 纺织学报, 2019, 40(01): 91-96. |
|
||
 京公网安备11010502044800号
京公网安备11010502044800号