纺织学报 ›› 2021, Vol. 42 ›› Issue (11): 159-165.doi: 10.13475/j.fzxb.20210100107
刘泽旭1,2, 胥光申1,2, 盛晓超1,2( ), 代欣怡1,2
), 代欣怡1,2
LIU Zexu1,2, XU Guangshen1,2, SHENG Xiaochao1,2(), DAI Xinyi1,2
摘要:
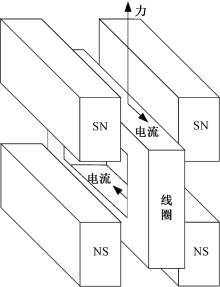
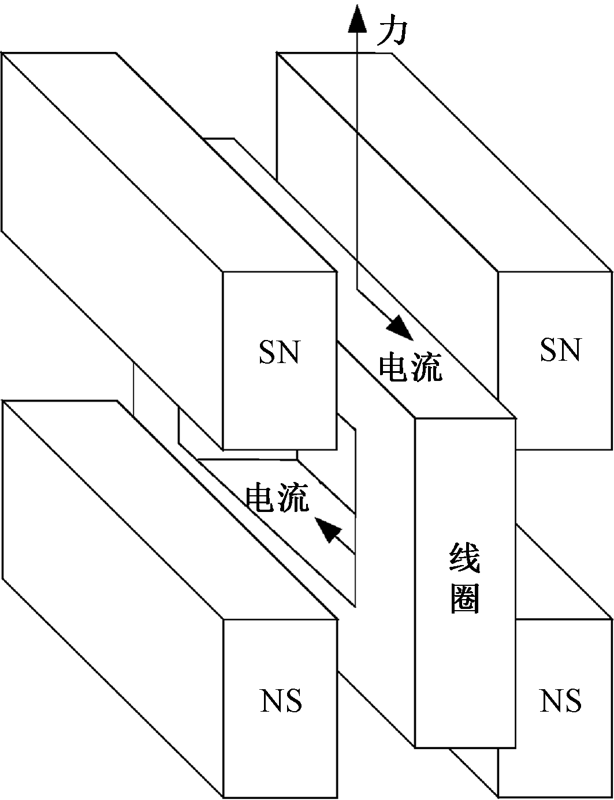
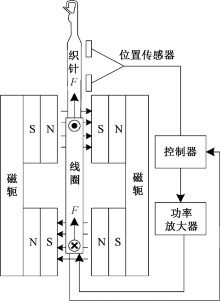
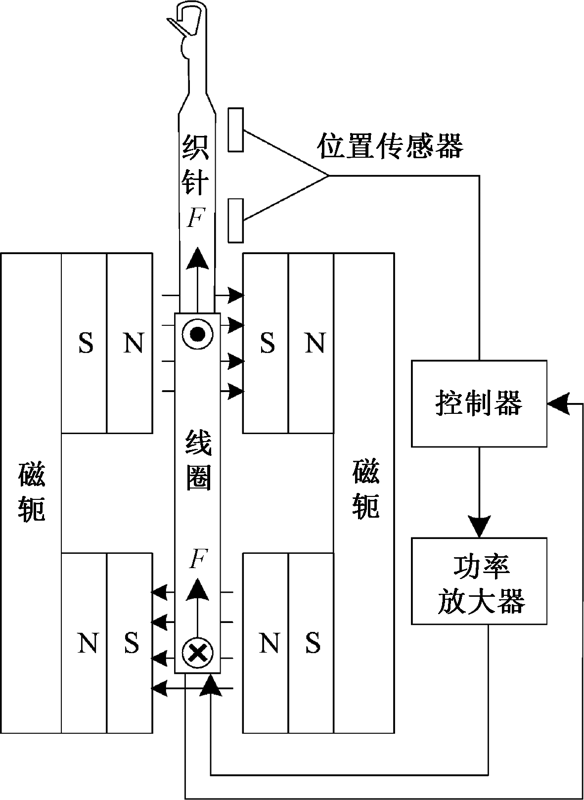
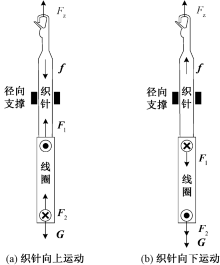
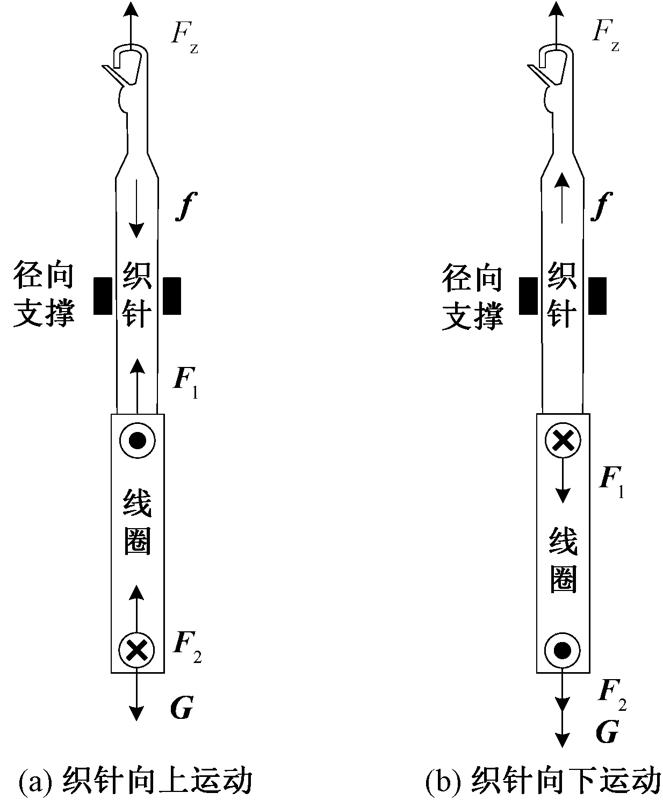
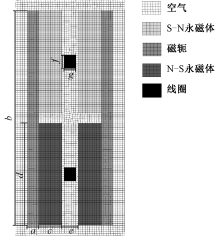
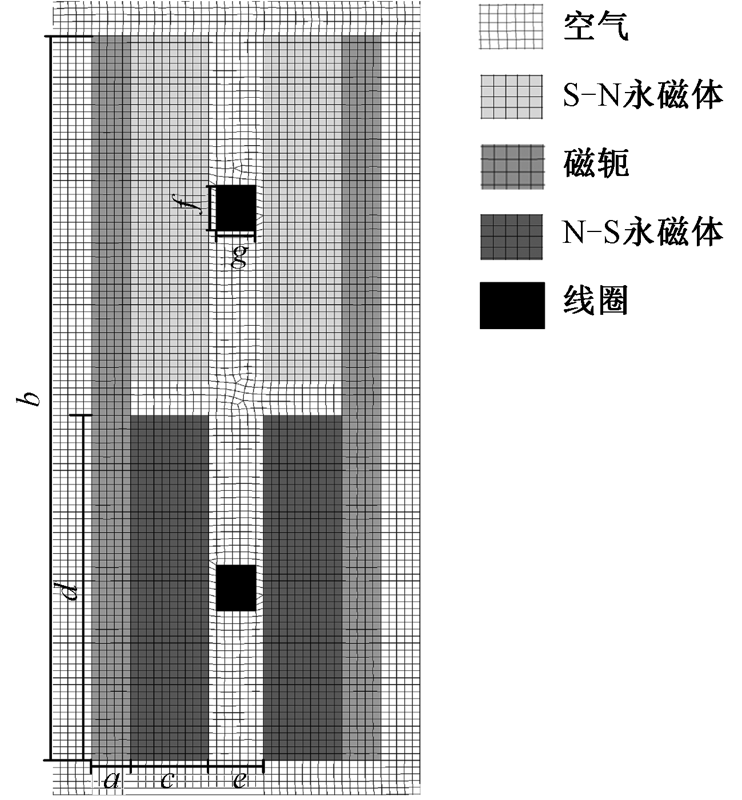
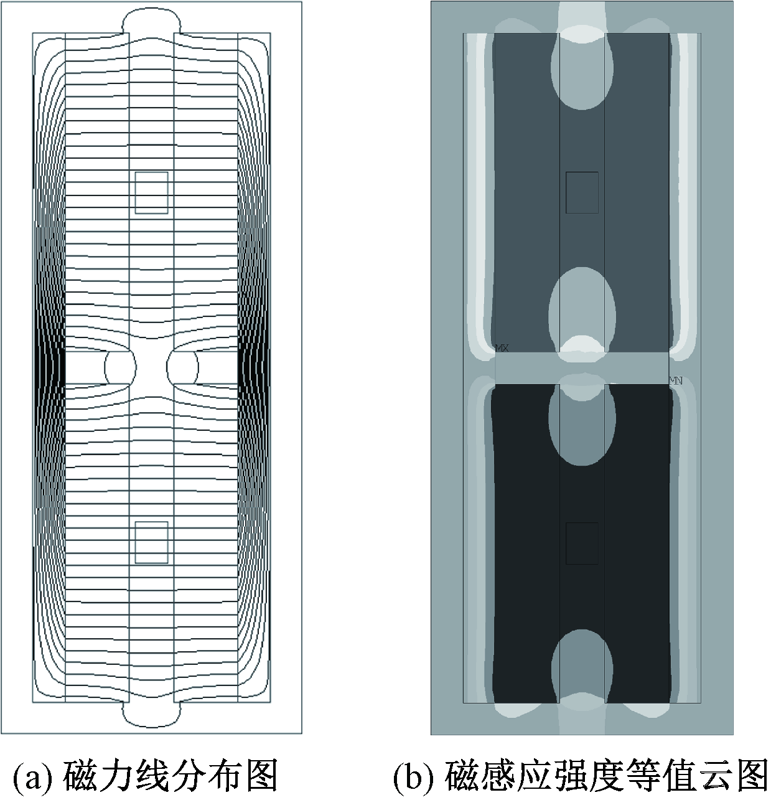
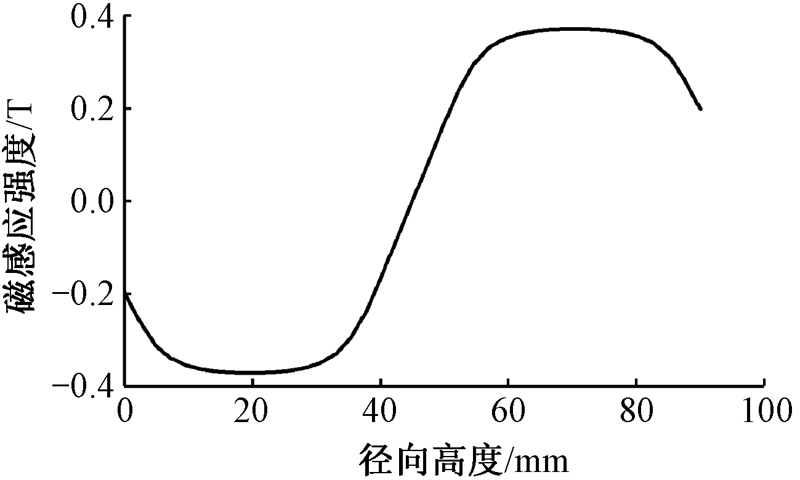
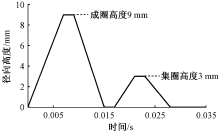
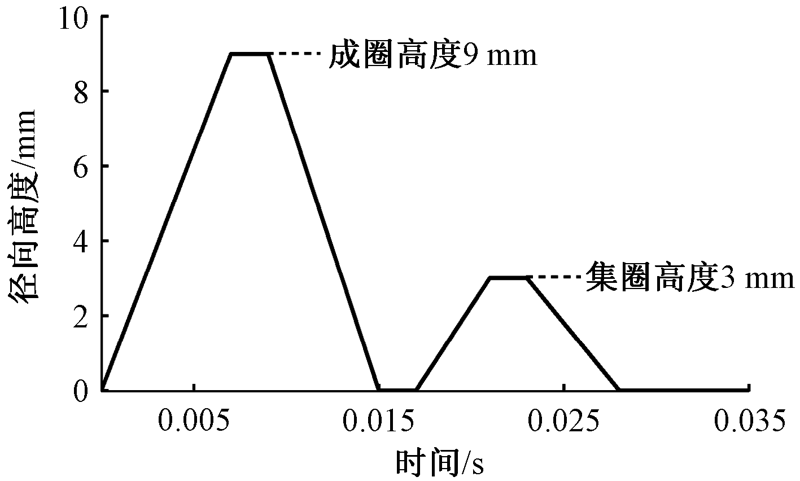
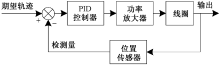
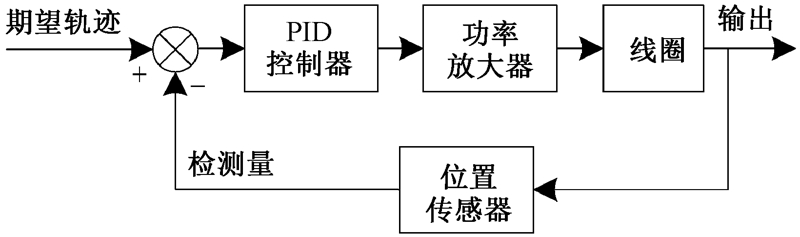
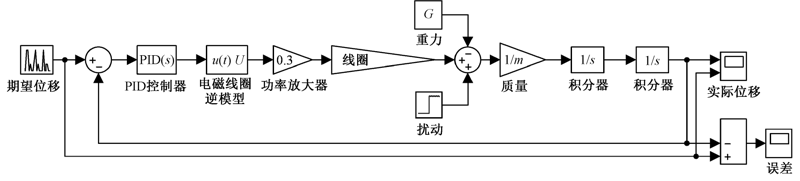
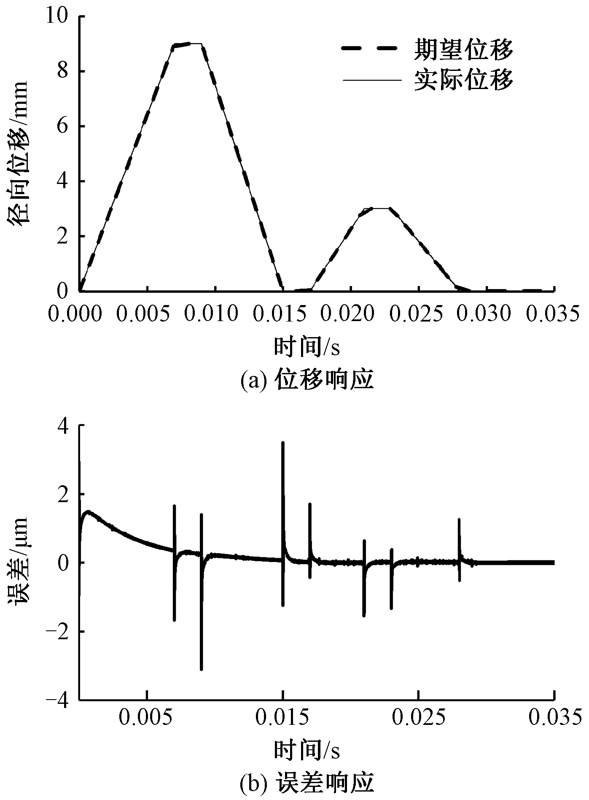
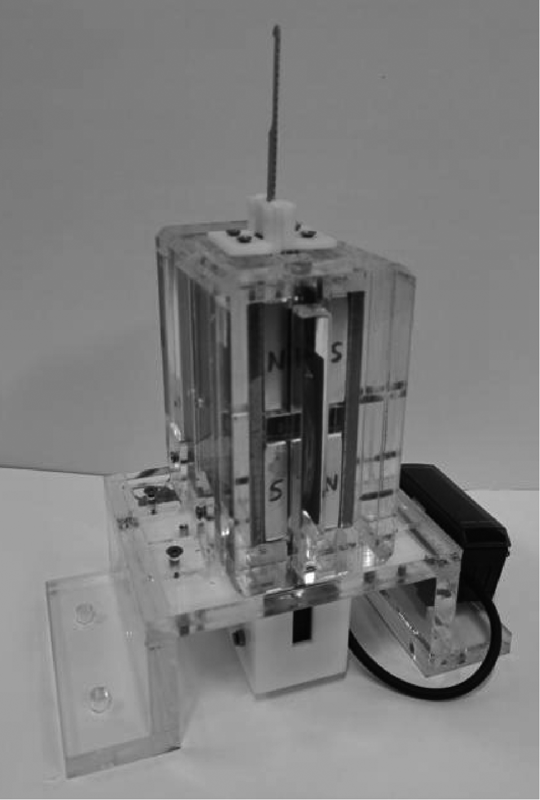
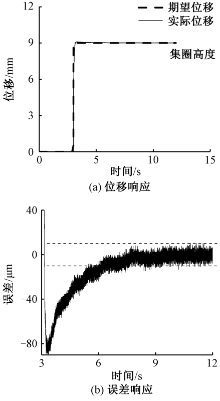
为解决织针三角驱动中存在摩擦、冲击等问题,并避免引入电磁力非线性影响,设计了一种基于洛伦兹力的磁悬浮织针驱动器。首先提出了驱动原理并推导了数学模型,利用ANSYS软件进行电磁有限元分析;然后设计了执行调节(PID)控制器并在MatLab/Simulink中进行控制系统仿真,最后搭建了实物平台进行实验。结果表明:驱动器工作区域磁场均匀稳定,电磁力满足驱动要求;织针轨迹与预期吻合,仿真误差在±3.5 μm之间;织针可以达到集圈高度,且响应迅速、平稳无振荡,测试误差在±10 μm之间。洛伦兹力磁悬浮织针驱动器可以消除织针运动中摩擦、振动和冲击,并且与磁阻力磁悬浮织针驱动器相比控制系统简单、线性度好,控制精度可达到微米级。
中图分类号:
| [1] |
PORATH M D C, BORTONI L A F, SIMONI R, et al. Offline and online strategies to improve pose accuracy of a Stewart platform using indoor-GPS[J]. Precision Engineering, 2020, 63:83-93.
doi: 10.1016/j.precisioneng.2020.01.003 |
| [2] |
QIAN Junbing, CHEN Xuedong, CHEN Han, et al. Magnetic field analysis of Lorentz motors using a novel segmented magnetic equivalent circuit method[J]. Sensors, 2013, 13:1664-1678.
doi: 10.3390/s130201664 pmid: 23358368 |
| [3] | 张森林, 沈国炎. 直线电机在电子提花机中的应用[J]. 纺织学报, 2008, 29(11):119-123. |
|
ZHANG Senlin, SHEN Guoyan. Application of linear motors in electronic jacquard[J]. Journal of Textile Research, 2008, 29(11):119-123.
doi: 10.1177/004051755902900202 |
|
| [4] | 范良志. 电织针永磁阵列内的静磁场分布及结构刚度分析[J]. 电机与控制学报, 2013, 17(3):84-91. |
| FAN Liangzhi. Static magnetic field and structure rigidity analysis for permanent magnet matrix in electric knitting needle[J]. Electric Machines and Control, 2013, 17(3):84-91. | |
| [5] | 汪诚诚. 电织针超薄直线电机阵列单元的结构优化设计[D]. 武汉: 武汉纺织大学, 2014:7-15. |
| WANG Chengcheng. Structure optimization design of electric needle thin linear motor of an array element[D]. Wuhan: Wuhan Textile University, 2014:7-15. | |
| [6] | 刘凯, 张团善, 胥光申, 等. 基于U型直线电机的袜机织针系统的参数选择[J]. 纺织报告, 2018(1):58-60. |
| LIU Kai, ZHANG Tuanshan, XU Guangshen, et al. Structural design of needle-picking system based on U-type linear motor[J]. Textile Reports, 2018(1):58-60. | |
| [7] | 吴晓光, 孔令学, 朱里, 等. 磁悬浮式针织提花驱动方式理论研究与探讨[J]. 纺织学报, 2012, 33(10):128-133. |
| WU Xiaoguang, KONG Lingxue, ZHU Li, et al. Theoretical research on propulsion mode of magnetic suspension needles for jacquard knitting[J]. Journal of Textile Research, 2012, 33(10):128-133. | |
| [8] | 吴晓光, 张弛, 朱里, 等. 磁悬浮式驱动织针的关键技术与试验模型[J]. 纺织学报, 2014, 35(10):129-135. |
|
WU Xiaoguang, ZHANG Chi, ZHU Li, et al. Key technologies of magnetic suspension driving knitting needles and experiment model[J]. Journal of Textile Research, 2014, 35(10):129-135.
doi: 10.1177/004051756503500206 |
|
| [9] | 李冬冬, 张成俊, 左小艳, 等. 混合磁悬浮织针驱动的永磁织针磁场分布规律[J]. 纺织学报, 2020, 41(9):136-142. |
| LI Dongdong, ZHANG Chengjun, ZUO Xiaoyan, et al. Study on magnetic field distribution in permanent magnetic needle drive using hybrid magnetic suspension needle[J]. Journal of Textile Research, 2020, 41(9):136-142. | |
| [10] | 万道玉, 吴晓光, 张弛, 等. 磁悬浮式驱动织针电磁力研究及线圈轮廓优化[J]. 针织工业, 2017(8):9-12. |
| WAN Daoyu, WU Xiaoguang, ZHANG Chi, et al. Electromagnetic force study of magnetic suspension driving knitting needle and coil profile optimization[J]. Knitting Industries, 2017(8):9-12. | |
| [11] | 游良风. 磁悬浮织针大行程驱动研究[D]. 武汉: 武汉纺织大学, 2020:7-21. |
| YOU Liangfeng. Study on the large stroke driving of Maglev knitting needle[D]. Wuhan: Wuhan Textile University, 2020:7-21. | |
| [12] |
KURNYTA-MAZUREK P, KURNYTA A, HENZEL M. Measurement system of a magnetic suspension system for a jet engine rotor[J]. Sensors, 2020, 20(3):862.
doi: 10.3390/s20030862 |
| [13] |
DING Sansan, SUN Jinji, HAN Weitao, et al. Modeling and analysis of a novel guidance magnet for high speed maglev train[J]. IEEE Access, 2019, 7:133324-133334.
doi: 10.1109/ACCESS.2019.2940728 |
| [14] | 刘洋, 吴晓光, 张弛, 等. 磁悬浮式驱动织针弯纱张力的动态分析及研究[J]. 针织工业, 2016(4):23-26. |
| LIU Yang, WU Xiaoguang, ZHANG Chi, et al. Dynamic analysis and research on knitting tension in the knitting process of magnetic levitated driven needle[J]. Knitting Industries, 2016(4):23-26. | |
| [15] | 朱里, 吴晓光, 孙盼, 等. 悬浮式驱动织针系统的高效编织模式研究[J]. 针织工业, 2019(7):17-21. |
| ZHU Li, WU Xiaoguang, SUN Pan, et al. Study of highly efficient knitting mode of suspension driven knitting needle system[J]. Knitting Industries, 2019(7):17-21. |
| [1] | 莫帅, 冯战勇, 党合玉, 邹振兴. 棉纺细纱锭子发展演变与研究展望[J]. 纺织学报, 2020, 41(06): 190-196. |
| [2] | 吴晓光 袁博 雷小龙 张驰 孔令学. 电磁驱动磁悬浮式片梭引纬模式的建立与实验[J]. 纺织学报, 2017, 38(09): 142-148. |
| [3] | 邱海飞. 3D打印技术在织机打纬−开口机构中的应用[J]. 纺织学报, 2017, 38(01): 140-146. |
| [4] | 姜磊. 卷染机自动控制系统的改造设计[J]. 纺织学报, 2015, 36(03): 121-127. |
| [5] | 吴强 马苏扬 廖萍. 磁悬浮拉幅定型传送单元[J]. 纺织学报, 2013, 34(9): 139-0. |
| [6] | 吴晓光 孔令学 朱里 武玉琴 黄振 李爽. 磁悬浮式针织提花驱动方式理论研究与探讨[J]. 纺织学报, 2012, 33(10): 128-133. |
| [7] | 李仁旺;饶楚楚. 面向按订单研制的分类成本模型的研究与应用[J]. 纺织学报, 2011, 32(4): 133-137. |
| [8] | 林子务. 状态维修的设备考核指标与激励机制探讨[J]. 纺织学报, 2003, 24(05): 99-101. |
| [9] | 陈德平;李秀真. 纺织设备中金属旋转体振动的单片机测试系统[J]. 纺织学报, 2000, 21(06): 38-40. |
| [10] | 于海生;潘松峰;吴贺荣. 纺织印染机械电气传动同步控制器的研制[J]. 纺织学报, 1999, 20(04): 53-55. |
|
 京公网安备11010502044800号
京公网安备11010502044800号