纺织学报 ›› 2022, Vol. 43 ›› Issue (12): 173-180.doi: 10.13475/j.fzxb.20210805708
宋洁心1,2, 付天宇1,2, 李凤鸣1,2, 宋锐1,2( ), 李贻斌1,2
), 李贻斌1,2
SONG Jiexin1,2, FU Tianyu1,2, LI Fengming1,2, SONG Rui1,2(), LI Yibin1,2
摘要:
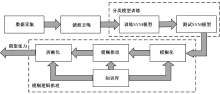
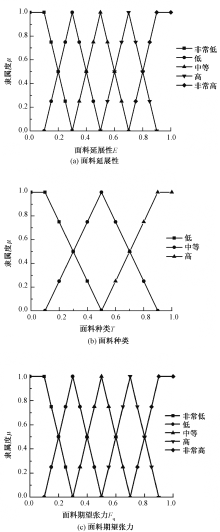
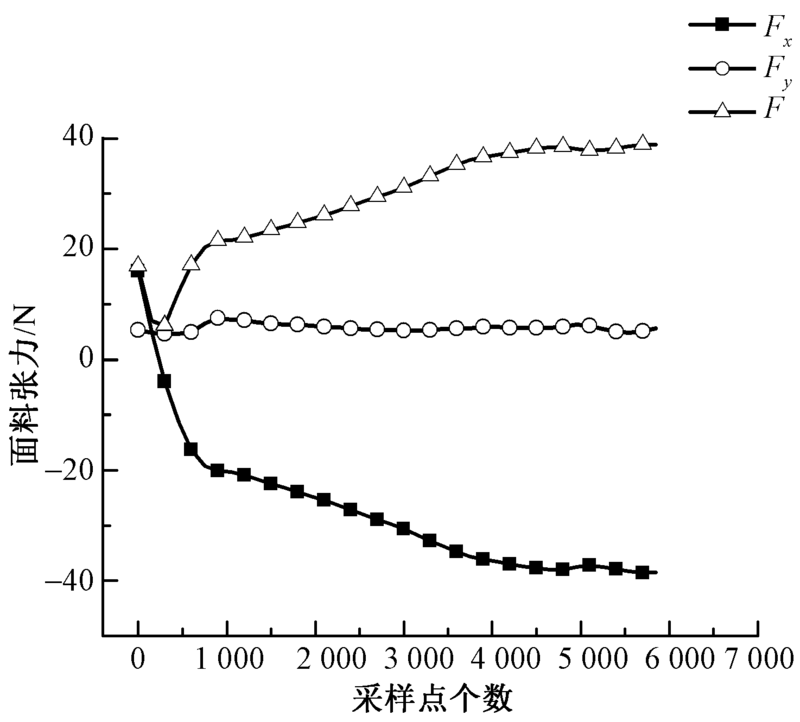
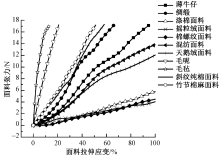
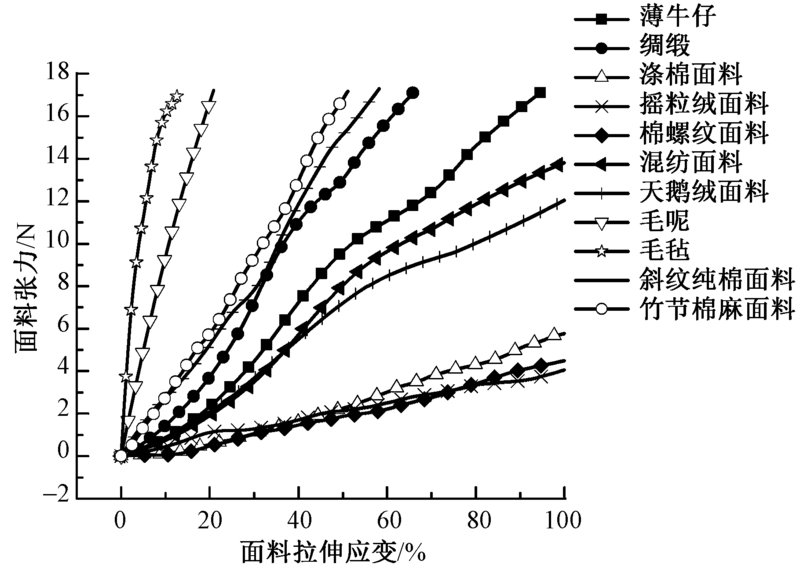
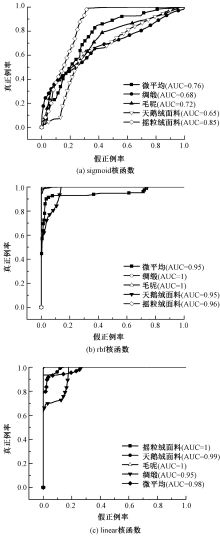
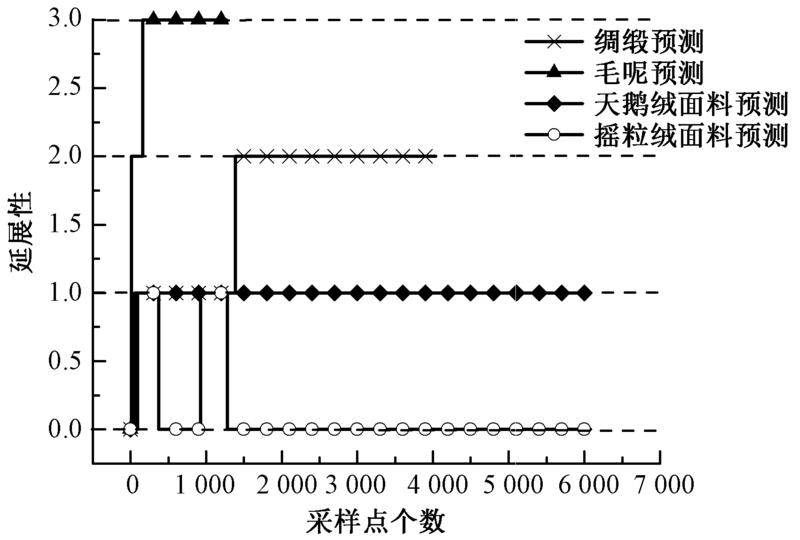
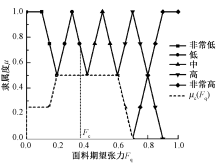
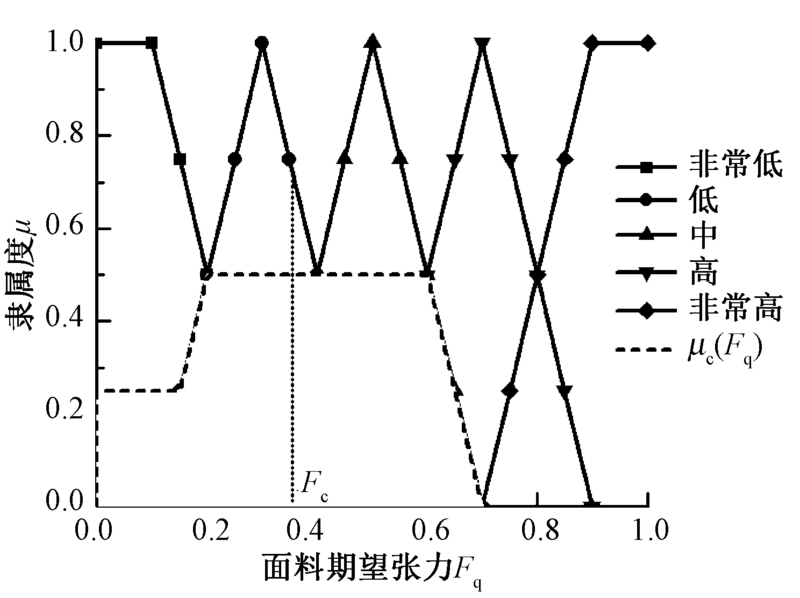
针对机器人缝制过程中未知面料期望张力导致面料变形的问题,根据面料的延展性分类训练支持向量机(SVM)模型,通过线性支持向量机模型预测未知面料的延展性;其次,采用模糊逻辑控制系统确定面料特性与期望张力之间的非线性关系;最后,利用毛呢、绸缎、天鹅绒布、摇粒绒布4种面料对SVM模型进行测试,通过模糊逻辑得到面料期望张力查询表,根据期望张力对毛呢和竹节棉麻进行缝制实验。结果表明:在拉伸面料的过程中,线性支持向量机模型预测的延展性最终趋于面料实际的延展性,基于模糊逻辑根据面料延展性和种类可实现对任意面料期望张力的预测,预测张力可满足智能化缝制加工的需要。该研究为避免面料形变从而提高缝制质量提供了前提条件。
中图分类号:
| [1] | NAYAK R, PADHYE R. Introduction to automation in garment manufacturing[M]. Sawston, Cambridge: Woodhead Publishing, 2018:2-8. |
| [2] | 刘国江. 立体缝制关键技术研究[D]. 西安: 西安理工学, 2019:2-20. |
| LIU Guojiang. Research on the key technology of three-dimensional sewing[D]. Xi'an: Xi'an University of Technology, 2019:2-20. | |
| [3] | 平丽华. 扣眼缝制机器人视觉引导系统研制[D]. 西安: 西安工程大学, 2019:4-18. |
| PING Lihua. Development of the vision guidance system of buttonhole sewing robot[D]. Xi'an: Xi'an Polytechnic University, 2019:4-18. | |
| [4] |
GERSHON D. Strategies for robotic handling of flexible sheet material[J]. Mechatronics, 1993, 3(5):611-623.
doi: 10.1016/0957-4158(93)90027-Y |
| [5] | TORGERSON E, PAUL F. Vision guided robotic fabric manipulation for apparel manufacturing[C]// 1987 IEEE International Conference on Robotics and Automation. Raleigh, NC, USA: IEEE, 1987:14-20. |
| [6] | PARASKEVI Z. Robot handling fabrics towards sewing using computational intelligence methods[M]. MANILA, Philippines: InTech, 2012:3-20. |
| [7] | 杨一帆. 基于阻抗控制的弱刚性构件双机器人协同磨抛技术研究[D]. 武汉: 华中科技大学, 2019:5-21. |
| YANG Yifan. Research on cooperative grinding and polish ing technology of two robots for weakly rigid compo nents based on impedance control[D]. Wuhan: Huazhong University of Science and Technology, 2019:5-21. | |
| [8] | SARHADI M. Robotic handling and lay-up of advanced composite materials: an overview[M]. Berlin Heidelberg: Springer, 1990:8-19. |
| [9] |
ZENG G, HEMAMI A. An overview of robot force control[J]. Robotica, 1997, 15(5):473-482.
doi: 10.1017/S026357479700057X |
| [10] | SICILIANO B, VILLANI L. Robot force control[M]. New York: Springer New York, NY, 1999:7-22. |
| [11] | WOGERER C, NITTMANN G, TATZER P. Intelligent manipulation of non-rigid parts in industry applicati-ons[C]// IEEE/ASME International Conference on Advanced Intelligent Mechatronics. Monterey, CA, USA: IEEE, 2005:1120-1126. |
| [12] | FUNG E, YUEN C, HAU L C, et al.. A robot system for the control of fabric tension for inspection[C]// ASME International Mechanical Engineering Congress and Exposition. Seattle, Washington, USA: ASME, 2007:813-819. |
| [13] | PATTON R, SWERN F, TRICAMO S, et al. Automated cloth handling using adaptive force feedback[J]. Dynamic Systems Measurement and Control-transactions of the Asme, 1992, 114(4):731-733. |
| [14] | SCHRIMPF J, WETTERWALD L E. Experiments towards auto mated sewing with a multi-robot sys-tem[C]// IEEE International Conference on Robotics and Automation. Saint Paul, MN, USA: IEEE, 2012:5258-5263. |
| [15] | GERSHON D, PORAT I. Vision servo control of a robotic sewing system[C]// IEEE International Conference on Robotics and Automation. Philadelphia, PA, USA: IEEE, 1988:1830-1935. |
| [16] | SCHRIMPF J, WETTERWALD L E, LIND M. Real-time system integration in a multi-robot sewing cell[C]// IEEE/RSJ International Conference on Intelligent Robots andSystems.VilamouraAlgarve, Portugal:IEEE, 2012:2724-2729. |
| [17] |
KOUSTOUMPARDIS P N, ASPRAGATHOS N A. Intelligent hierarchical robot control for sewing fabrics[J]. Robotics and Computer Integrated Manufacturing, 2014, 30(1):34-46.
doi: 10.1016/j.rcim.2013.08.001 |
| [18] | 周志华. 机器学习[M]. 北京: 清华大学出版社, 2017:121-145. |
| ZHOU Zhihua. Machine learning[M]. Beijing: Tsinghua University Press, 2017:121-145. | |
| [19] | PARASURAMAN S, GANAPATHY V, SHIRINZADEH B. Fuzzy decision mechanism combined with neuro-fuzzy controller for behavior based robot navigation[C]// Conference of the IEEE Industrial Electronics Socity.Roanoke, VA, USA: IEEE, 2003:2410-2416. |
| [20] | 李国勇, 杨丽娟. 神经·模糊·预测控制及其MatLab实现[M]. 北京: 电子工业出版社, 2018:206-217. |
| LI Guoyong, YANG Lijuan. Neural fuzzy predictive control and its matlab implementation[M]. Beijing: Electronic Industry Press, 2018:206-217. |
| [1] | 吴柳波, 李新荣, 杜金丽. 基于轮廓提取的缝纫机器人运动轨迹规划研究进展[J]. 纺织学报, 2021, 42(04): 191-200. |
| [2] | 刘立东, 李新荣, 刘汉邦, 李丹丹. 基于纬编针织物特性的静电吸附力模型[J]. 纺织学报, 2021, 42(03): 161-168. |
| [3] | 鲁喜 杨建成. 用于碳纤维织物的多层织机经纱张力检测方法[J]. 纺织学报, 2016, 37(07): 137-141. |
| [4] | 楼彦华;孙云云;任军军;郭吉丰. 一种低成本直驱工业平缝机控制系统[J]. 纺织学报, 2009, 30(10): 134-138. |
| [5] | 王红凯;张森林. 基于Linux嵌入式全自动横机软件系统设计[J]. 纺织学报, 2008, 29(2): 101-105. |
| [6] | 杨建成;蒋秀明;周国庆;吴冬凤;何辉. 织机经纱张力Fuzzy-PID控制及其检测方法[J]. 纺织学报, 2008, 29(10): 105-108. |
| [7] | 李革;梅靖;赵匀;潘海鹏. 复贴机张力的模糊自整定PID控制[J]. 纺织学报, 2006, 27(6): 41-43. |
| [8] | 李炜;朱新坚;魏鹏霄. 最小二乘法辨识的匀整控制系统的模糊控制[J]. 纺织学报, 2006, 27(2): 37-40. |
| [9] | 李伟锋;张一风. 基于单片机的模糊速度控制在清花中的应用[J]. 纺织学报, 2006, 27(10): 99-101. |
| [10] | 屈稳太;张森林. 热定型机的多变量模糊控制技术[J]. 纺织学报, 2005, 26(4): 79-82. |
| [11] | 姚杰;叶国铭. 新型开环自调匀整装置的分析与设计[J]. 纺织学报, 2005, 26(3): 44-45. |
| [12] | 潘海鹏;柯挺;戴文战. 一类不确定性纺织过程的自组织模糊控制[J]. 纺织学报, 2003, 24(05): 17-19. |
| [13] | 潘海鹏;柯挺;戴文战. 纺织生产过程温控对象的自调整模糊控制[J]. 纺织学报, 2003, 24(03): 33-34. |
| [14] | 周光茜;郝凤鸣. 模糊控制纺纱张力的研究[J]. 纺织学报, 2003, 24(01): 21-23. |
| [15] | 郭月洋;陈瑞琪. 梳棉机自调匀整系统的模糊分析[J]. 纺织学报, 2001, 22(05): 6-8. |
|
||
 京公网安备11010502044800号
京公网安备11010502044800号