纺织学报 ›› 2023, Vol. 44 ›› Issue (07): 199-206.doi: 10.13475/j.fzxb.20220500101
杨金, 李麒阳, 季霞( ), 孙以泽
), 孙以泽
YANG Jin, LI Qiyang, JI Xia(), SUN Yize
摘要:
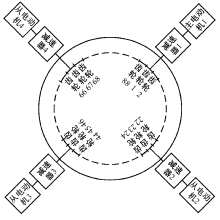
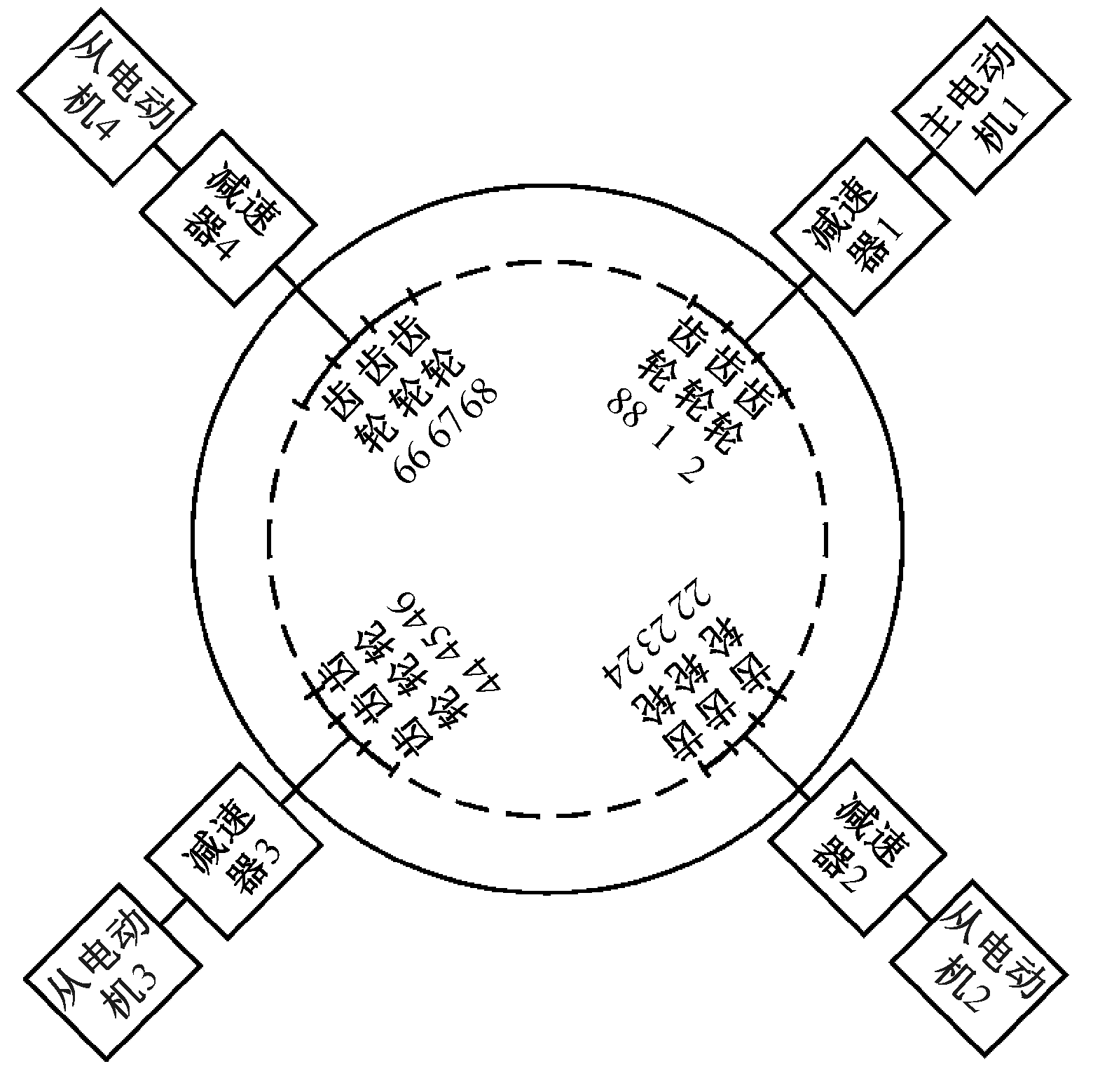
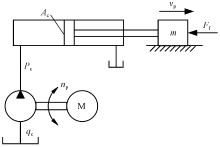
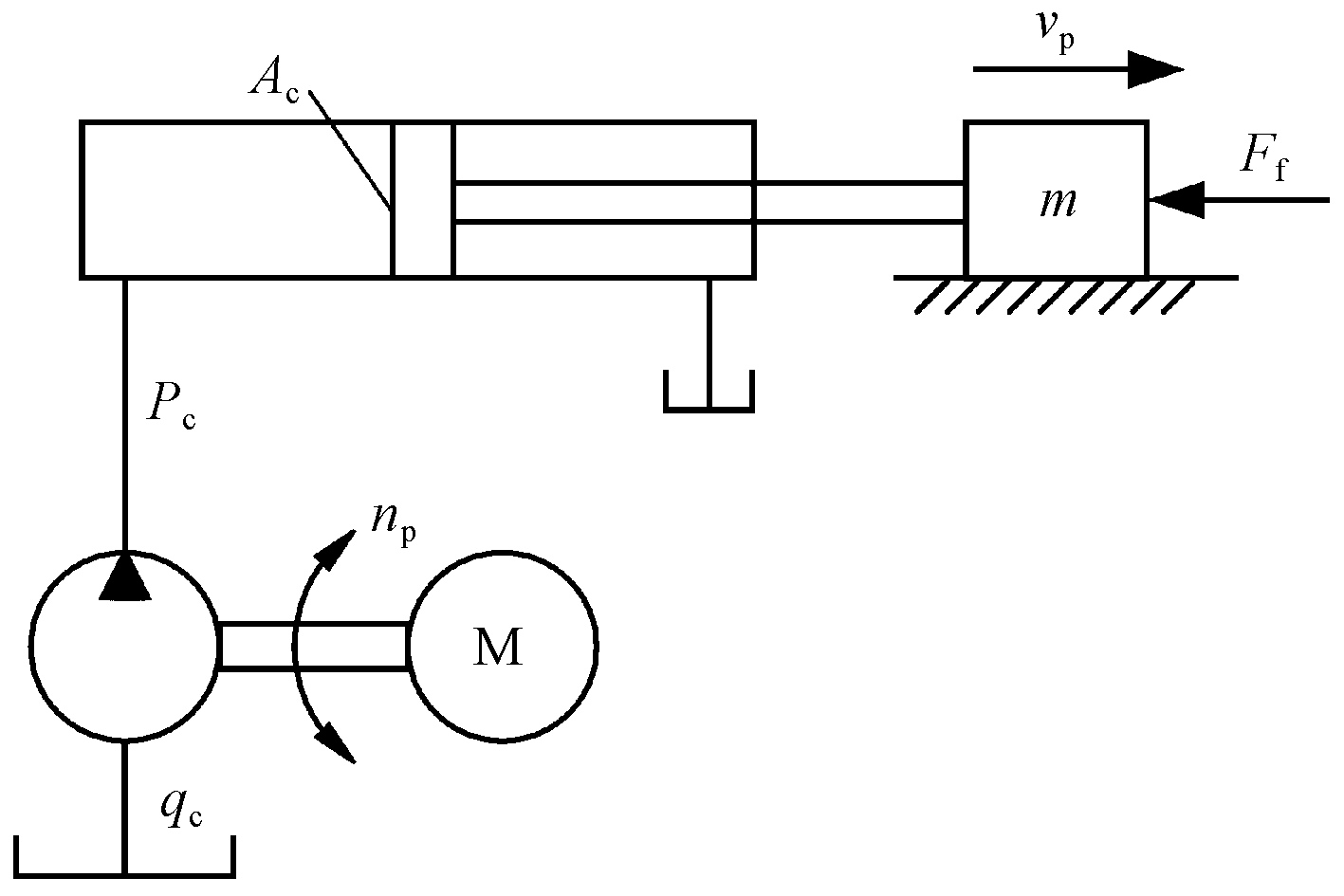
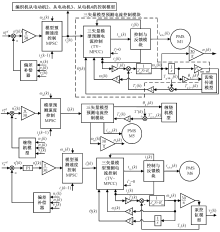
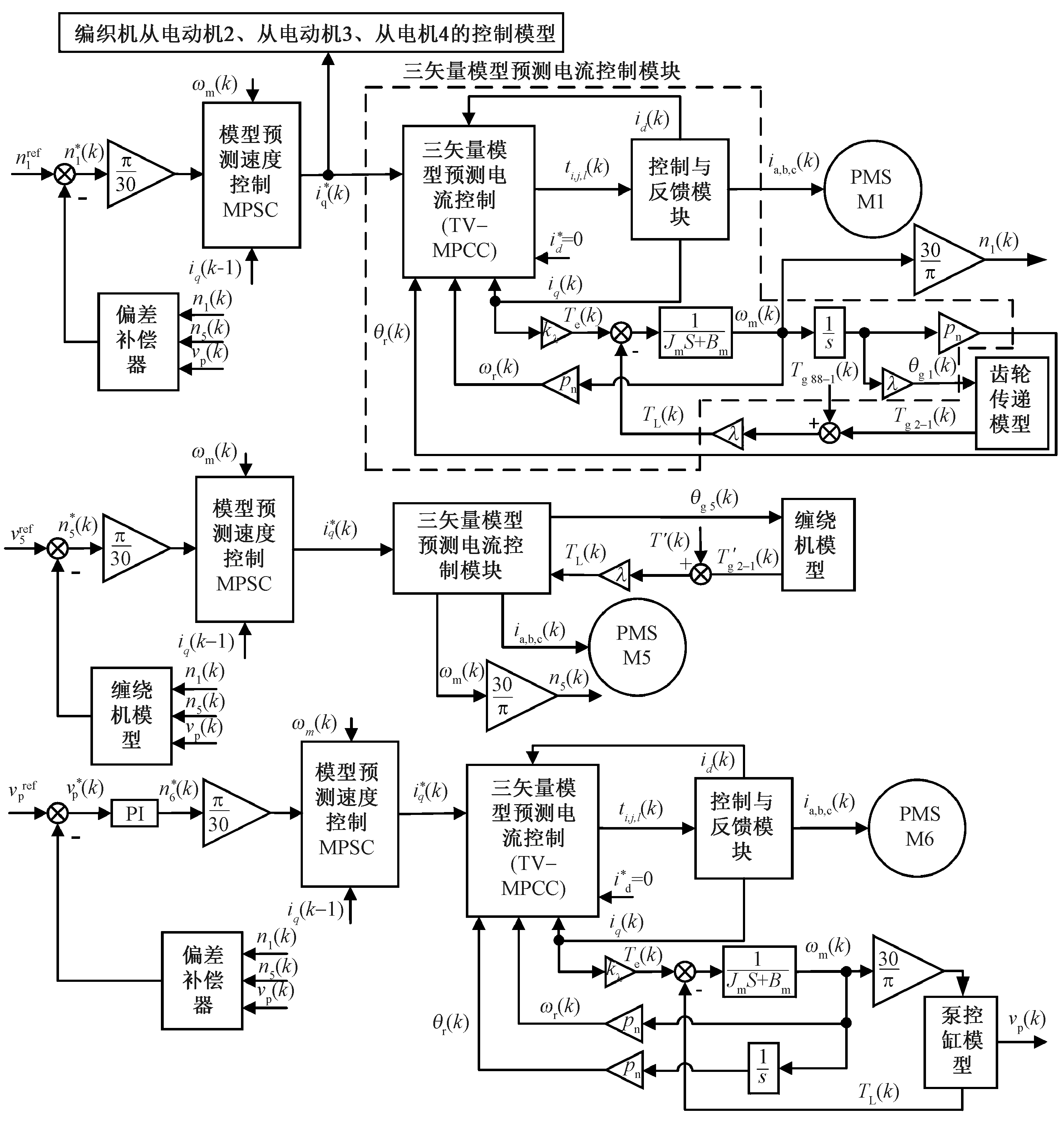
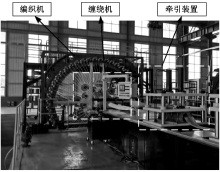
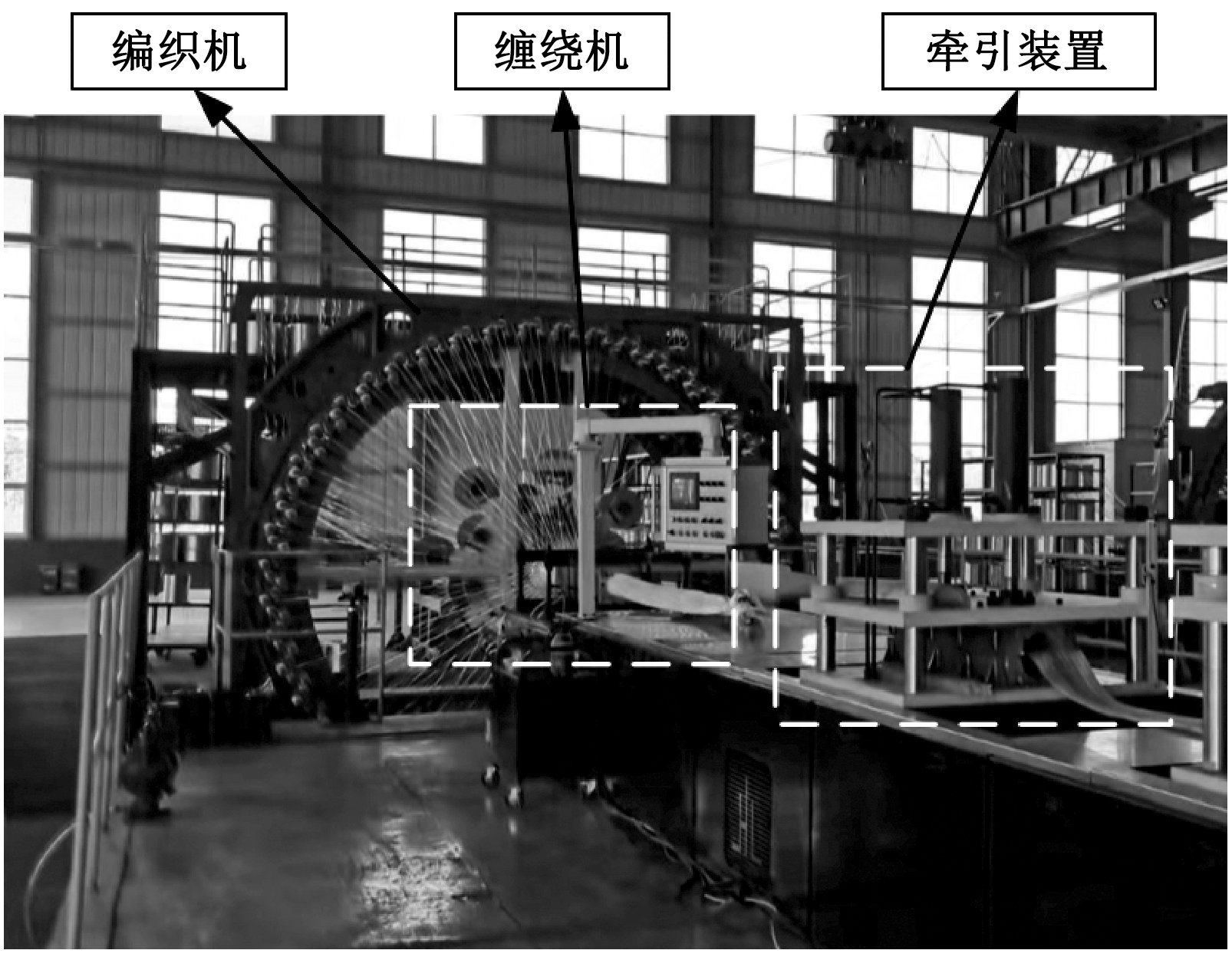
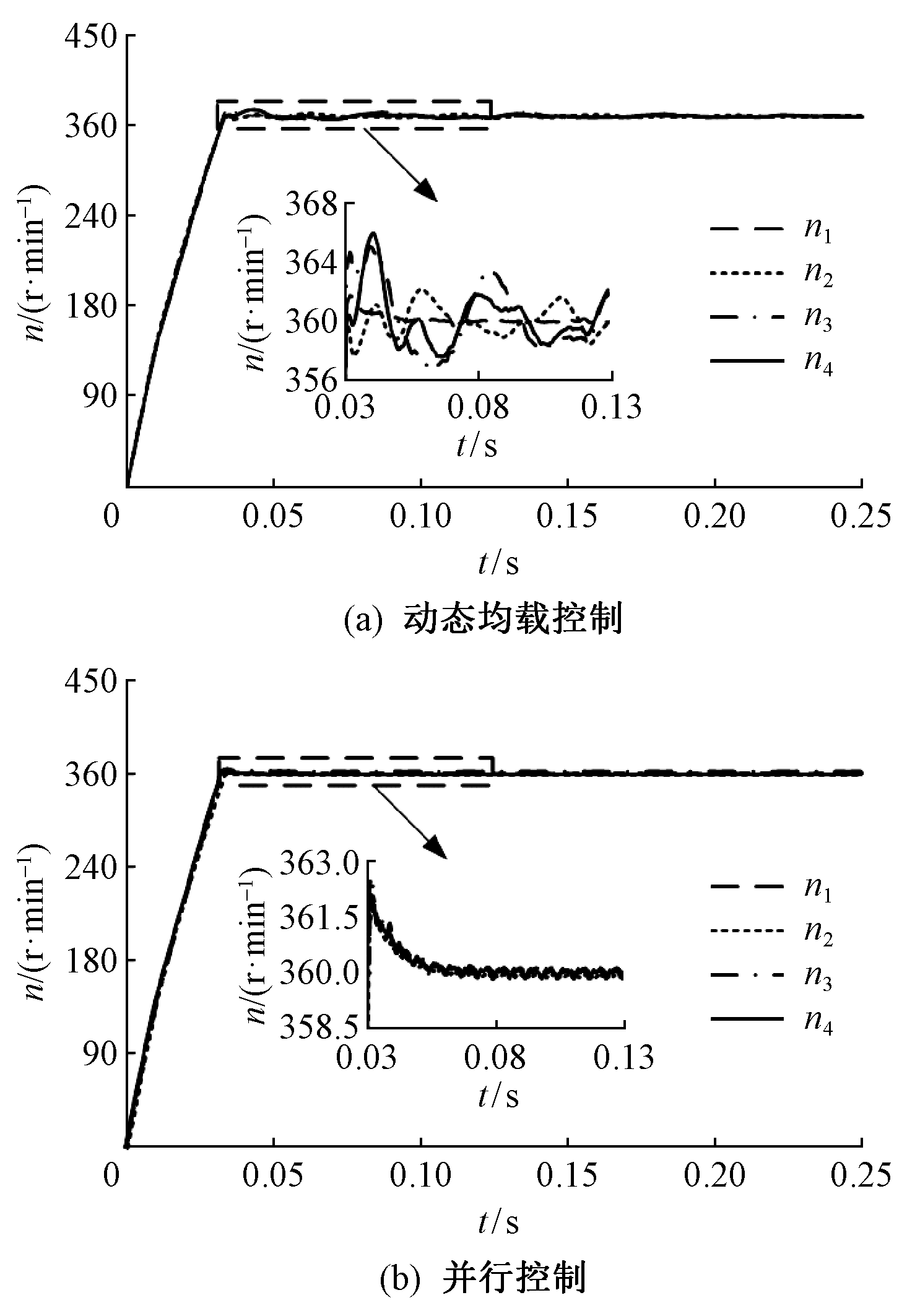
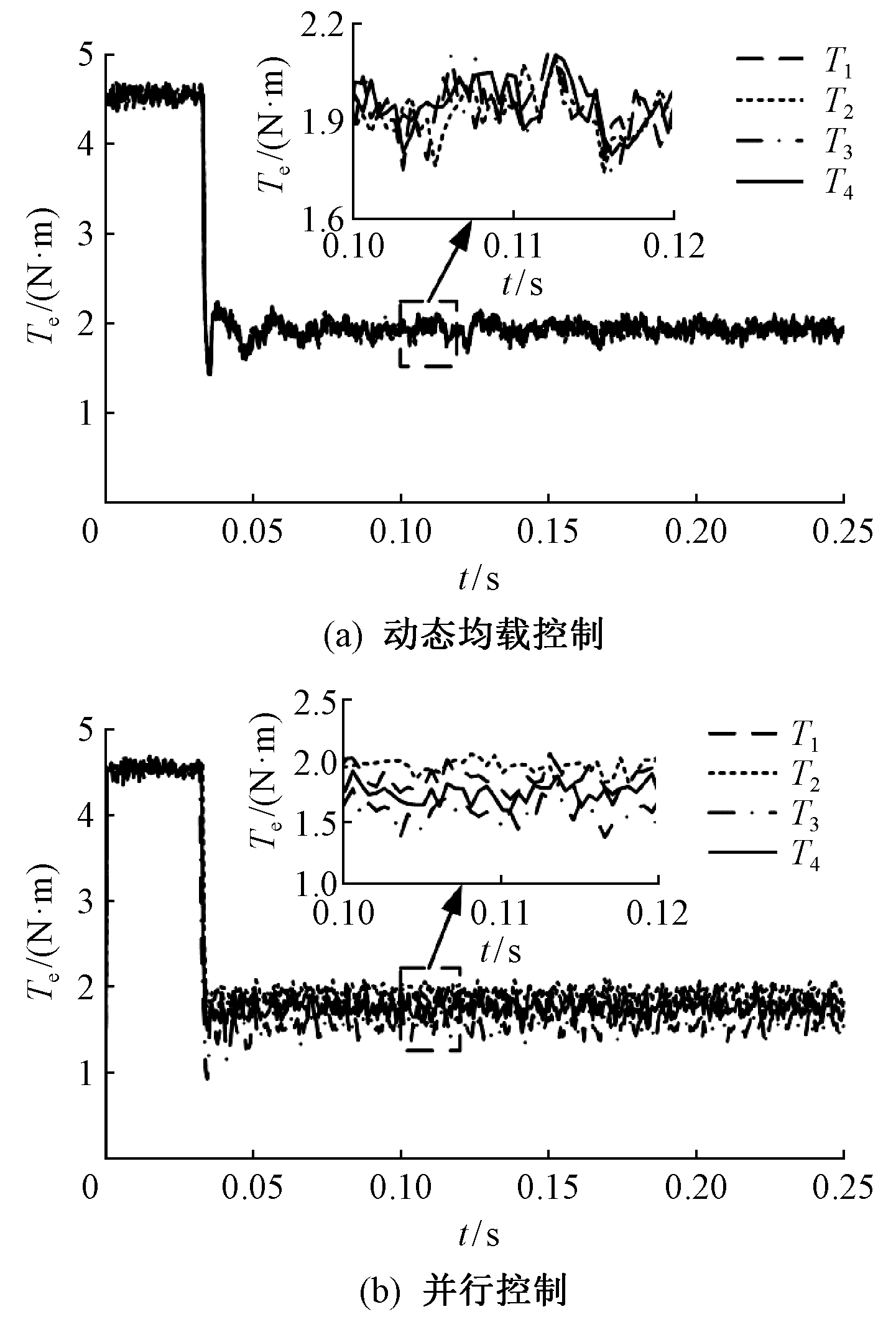
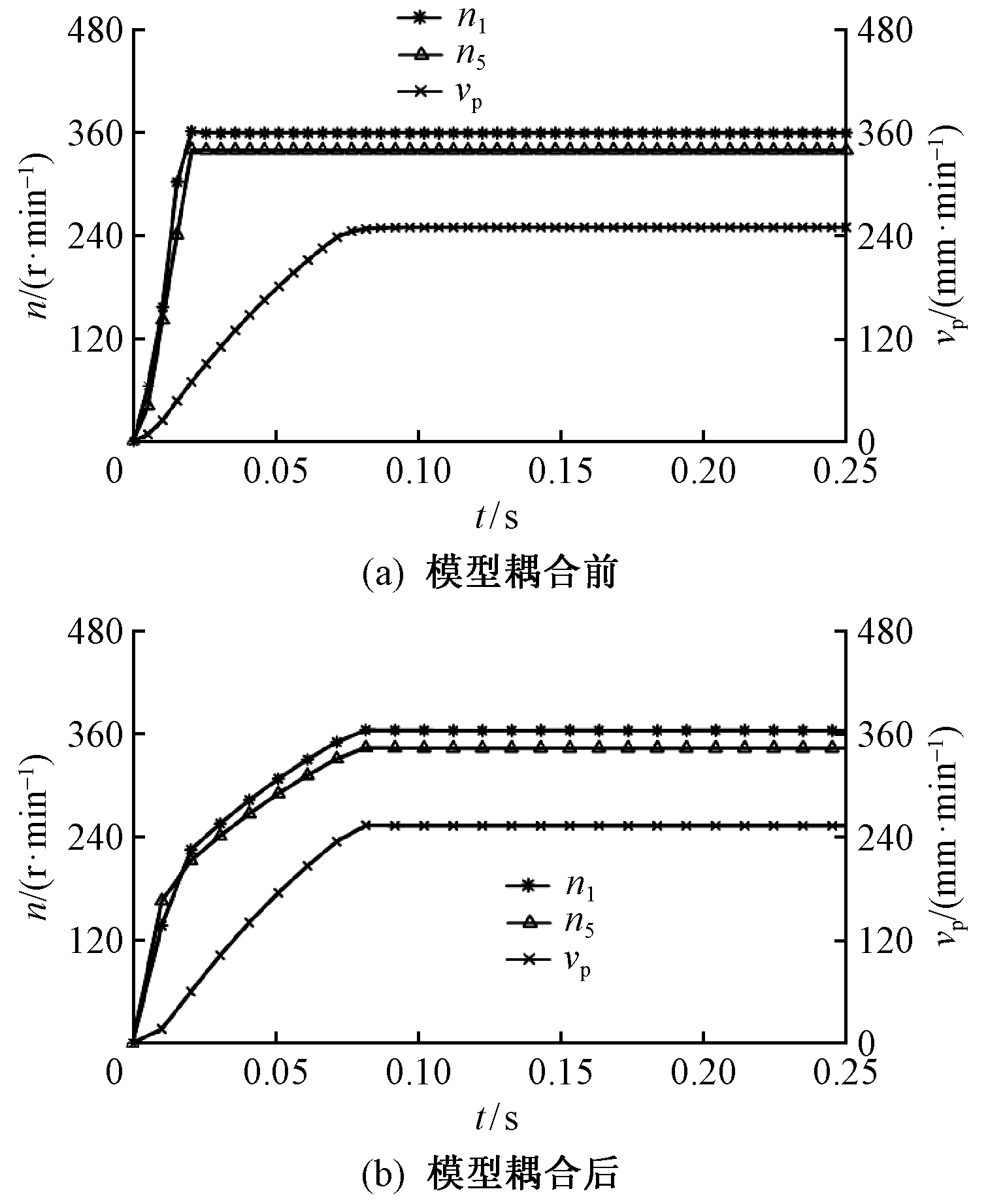
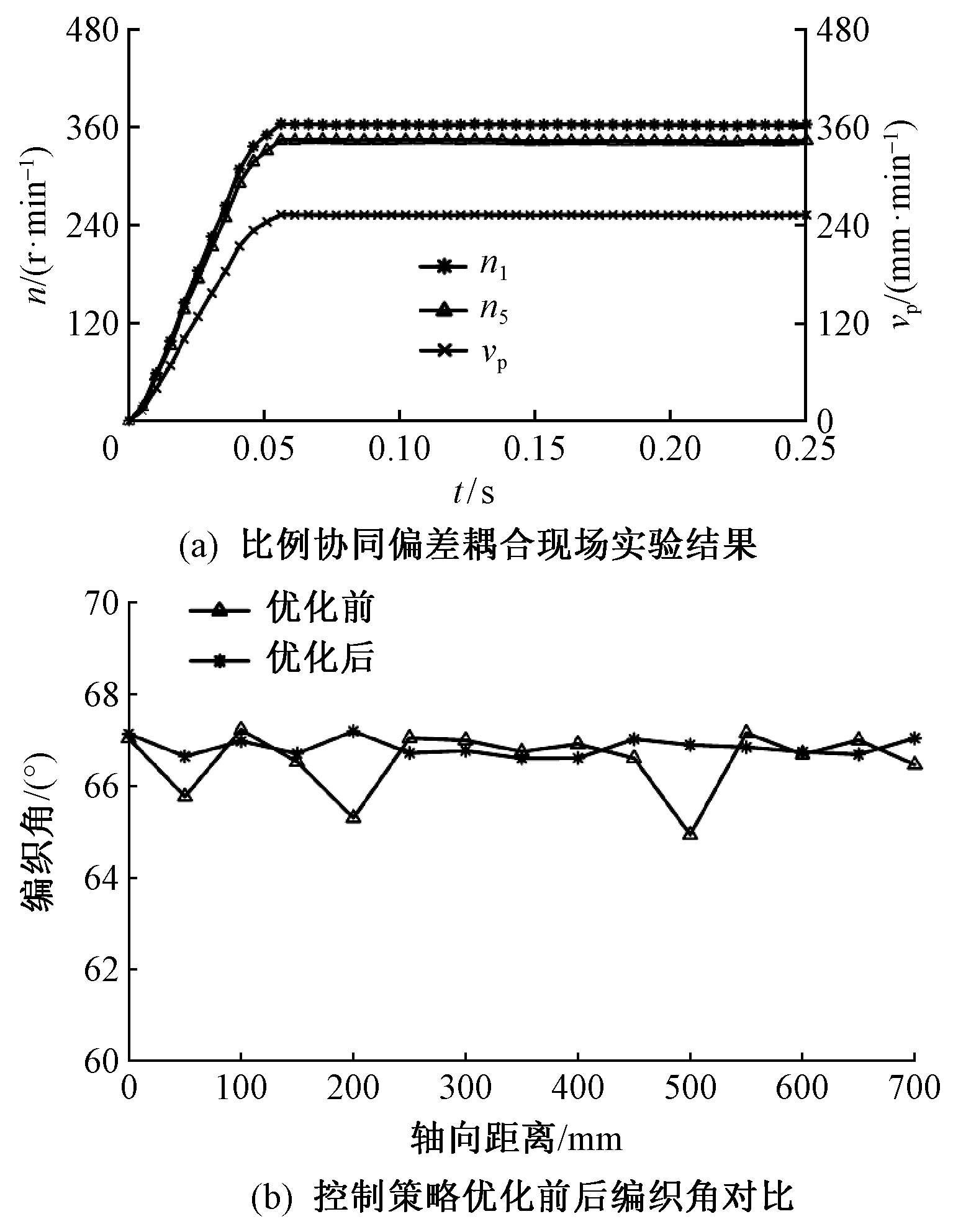
为解决纤维增强复合材料型材、管件类生产过程中编织机多电动机负载不均,以及编织转速、缠绕转速和牵引速度难以协同工作等问题,提出基于模型预测控制的动态均载控制方法,应用于编织机电动机组,建立编织-缠绕-拉挤一体化数学模型,采用比例协同偏差耦合控制策略保证编织-缠绕-拉挤系统的协同工作精度,并对其进行Simulink仿真与现场实验。实验结果表明:动态均载控制能使编织机电动机组在满足转速的前提下,输出转矩偏差控制在0.2 N·m以内;比例协同偏差耦合控制策略使互相独立的编织机、缠绕机和牵引装置在0.08 s内达到协同要求,提高了编织角的稳定性和复合材料制品的综合性能。
中图分类号:
| [1] | 李静. 三维编织机的研究现状与发展趋势[J]. 纺织科学研究, 2020(2): 78-80. |
| LI Jing. Research status and development trend of three-dimensional knitting machine[J]. Textile Science Research, 2020(2): 78-80. | |
| [2] | 刘宜胜, 徐海亮, 吴震宇, 等. 三维编织机运动仿真分析及其轨道优化设计[J]. 纺织学报, 2017, 38(4): 134-139. |
| LIU Yisheng, XU Hailiang, WU Zhenyu, et al. Motion simulation analysis and track optimal design for three-dimensional braiding machine[J]. Journal of Textile Research, 2017, 38(4): 134-139. | |
| [3] | ZHANG Y J, MENG Z, SUN Y Z. Dynamic modeling and chaotic analysis of gear transmission system in a braiding machine with or without random perturba-tion[J]. Shock and Vibration, 2016(6):1-12. |
| [4] |
YAO L L, MENG Z, BU J Q, et al. Non-linear dynamic feature analysis of a multiple-stage closed-loop gear transmission system for 3D circular braiding machine[J]. Symmetry, 2020.DOI:10.3390/sym12111788.
doi: 10.3390/sym12111788 |
| [5] |
YAO L L, MENG Z, BU J Q, et al. Investigation of nonlinear characteristics of a gear transmission system in a braiding machine with multiple excitation factors[J]. Shock and Vibration, 2020. DOI: 10.1155/2020/2747204.
doi: 10.1155/2020/2747204 |
| [6] | 许家忠, 袁亚男, 张博文, 等. 基于连续编织-缠绕-拉挤成型工艺的复合材料直管固化研究[J]. 玻璃钢/复合材料, 2017(1): 68-76. |
| XU Jiazhong, YUAN Yanan, ZHANG Bowen, et al. The curing research of composite pipe based on braiding-winding-pultrusion process[J]. Fiber Reinforced Plastics/Composites, 2017(1): 68-76. | |
| [7] | 田会方, 陈海清, 吴迎峰. 复合材料管状制品拉挤-缠绕装置的设计与分析[J]. 复合材料科学与工程, 2021(2): 110-114. |
| TIAN Huifang, CHEN Haiqing, WU Yingfeng. Design and analysis of pultrusion-winding device for composite tubular products[J]. Composites Science and Engineering, 2021(2): 110-114. | |
| [8] |
VAFAIE M H, DEHKORDI B M, MOALLEM P, et al. A new predictive direct torque control method for improving both steady-state and transient-state operations of the PMSM[J]. IEEE Transactions on Power Electronics, 2016, 31(5): 3738-3753.
doi: 10.1109/TPEL.2015.2462116 |
| [9] | 谢万宇, 孟婥, 卜剑秋, 等. 基于EtherCAT多轴伺服系统的编织机控制系统[J]. 东华大学学报(自然科学版), 2019, 45(3): 418-424. |
| XIE Wanyu, MENG Chuo, BU Jianqiu, et al. Braiding machine control system based on EtherCAT multi-axis servo system[J]. Journal of Donghua University(Natural Science), 2019, 45(3): 418-424. | |
| [10] | 刘佳敏, 葛召炎, 吴轩, 等. 基于占空比调制的永磁同步电机预测电流控制[J]. 中国电机工程学报, 2020, 40(10): 3319-3328. |
| LIU Jiamin, GE Zhaoyan, WU Xuan, et al. Predictive current control of permanent magnet synchronous motor based on duty-cycle modulation[J]. Proceedings of the CSEE, 2020, 40(10): 3319-3328. | |
| [11] |
YANG M, LANG X Y, LONG J, et al. Flux immunity robust predictive current control with incremental model and extended state observer for PMSM drive[J]. IEEE Transactions on Power Electronics, 2017, 32(12): 9267-9279.
doi: 10.1109/TPEL.2017.2654540 |
| [12] |
BOUGUENNA I F, TAHOUR A, KENNEL R, et al. Multiple-vector model predictive control with fuzzy logic for PMSM electric drive systems[J]. Energies, 2021.DOI: 10.3390/en14061727.
doi: 10.3390/en14061727 |
| [13] |
GARCIA C F, SILVA C A, RODRIGUEZ J R, et al. Modulated model-predictive control with optimized overmodulation[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2019, 7(1): 404-413.
doi: 10.1109/JESTPE.2018.2828198 |
| [14] | 江朝东. 永磁同步电机伺服系统的模型预测控制方法研究[D]. 南京: 东南大学, 2019: 17-31. |
| JIANG Chaodong. Research on model predictive control method for permanent magnet synchronous motor servo system[D]. Nanjing: Southeast University, 2019: 17-31. | |
| [15] |
ADILE A, SERDAR I. Runge-kutta model predictive speed control for permanent magnet synchronous motors[J]. Energies, 2020. DOI:10.3390/en13051216.
doi: 10.3390/en13051216 |
| [16] | 庄培灿. 径向环形编织机多电机协同控制策略研究[D]. 上海: 东华大学, 2022: 48-59. |
| ZHUANG Peican. Research on multi-motor cooperative control strategy of radial circular braider[D]. Shanghai: Donghua University, 2022: 48-59. |
| [1] | 陈露, 吴孟锦, 贾立霞, 阎若思. 氧等离子体改性超高分子量聚乙烯纤维复合材料层间损伤声发射特征分析[J]. 纺织学报, 2023, 44(07): 116-125. |
| [2] | 段成红, 吴港本, 罗翔鹏. 基于DIGIMAT的碳纤维增强环氧树脂编织复合材料的力学性能[J]. 纺织学报, 2023, 44(07): 126-131. |
| [3] | 李皎, 陈利, 姚天磊, 陈小明. 类回转预制体针刺机器人系统设计[J]. 纺织学报, 2023, 44(07): 207-213. |
| [4] | 吕钧炜, 罗龙波, 刘向阳. 基于直接氟化技术的芳纶表/界面结构设计与制备研究进展[J]. 纺织学报, 2023, 44(06): 21-27. |
| [5] | 韦玉辉, 郑晨, 程尔骕, 赵书涵, 苏兆伟. 光催化自清洁芳纶织物的制备及其性能[J]. 纺织学报, 2023, 44(05): 171-176. |
| [6] | 周泠卉, 曾佩, 鲁瑶, 付少举. 聚乙烯醇纳米纤维膜/罗纹空气层织物复合吸声材料的制备及其性能[J]. 纺织学报, 2023, 44(03): 73-78. |
| [7] | 刘东炎, 郑成燕, 王晓旭, 钱坤, 张典堂. 超高分子量聚乙烯织物/聚脲柔性复合材料的抗破片侵彻机制[J]. 纺织学报, 2023, 44(03): 79-87. |
| [8] | 冯帅博, 强荣, 邵玉龙, 杨啸, 马茜, 陈博文, 陈熠, 高明洋, 陈彩虹. 丝瓜络衍生碳纤维基复合材料的电磁波吸收性能[J]. 纺织学报, 2023, 44(02): 69-75. |
| [9] | 蔡洁, 王亮, 傅宏俊, 钟智丽. 玻璃纤维/碳纤维织物基复合材料的电磁屏蔽性能[J]. 纺织学报, 2023, 44(02): 111-117. |
| [10] | 丁娟, 刘阳, 张晓飞, 郝克倩, 宗蒙, 孔雀. Fe/C多孔碳材料制备及其涂层棉织物的吸波性能[J]. 纺织学报, 2023, 44(02): 191-198. |
| [11] | 段亚弟, 谢巍杰, 邱海鹏, 王晓猛, 王岭, 张典堂, 钱坤. 界面层对三维机织角联锁SiCf/SiC复合材料断裂韧性的影响[J]. 纺织学报, 2023, 44(01): 119-128. |
| [12] | 应志平, 王伟青, 吴震宇, 胡旭东. 三维正交机织复合材料的冲后压缩性能[J]. 纺织学报, 2023, 44(01): 129-135. |
| [13] | 张书诚, 邢剑, 徐珍珍. 基于废弃聚苯硫醚滤料的多层吸声材料制备及其性能[J]. 纺织学报, 2022, 43(12): 35-41. |
| [14] | 苏子越, 单颖法, 巫莹柱, 秦介垚, 彭美婷, 王晓梅, 黄美林. 碳纤维织物基形状记忆复合材料的制备及其性能[J]. 纺织学报, 2022, 43(11): 75-80. |
| [15] | 张毅, 邵利锋, 杨彬, 高金霞, 郁崇文. 棕榈纤维毡/聚(3-羟基丁酸酯-co-3-羟基戊酸酯)热压复合材料的吸声性能[J]. 纺织学报, 2022, 43(10): 24-30. |
|
||
 京公网安备11010502044800号
京公网安备11010502044800号