纺织学报 ›› 2023, Vol. 44 ›› Issue (12): 170-180.doi: 10.13475/j.fzxb.20220606701
李珣1,2( ), 李哲文1, 张婷文1, 景军锋1,2, 李鹏飞1
), 李哲文1, 张婷文1, 景军锋1,2, 李鹏飞1
LI Xun1,2(), LI Zhewen1, ZHANG Tingwen1, JING Junfeng1,2, LI Pengfei1
摘要:
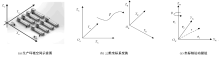
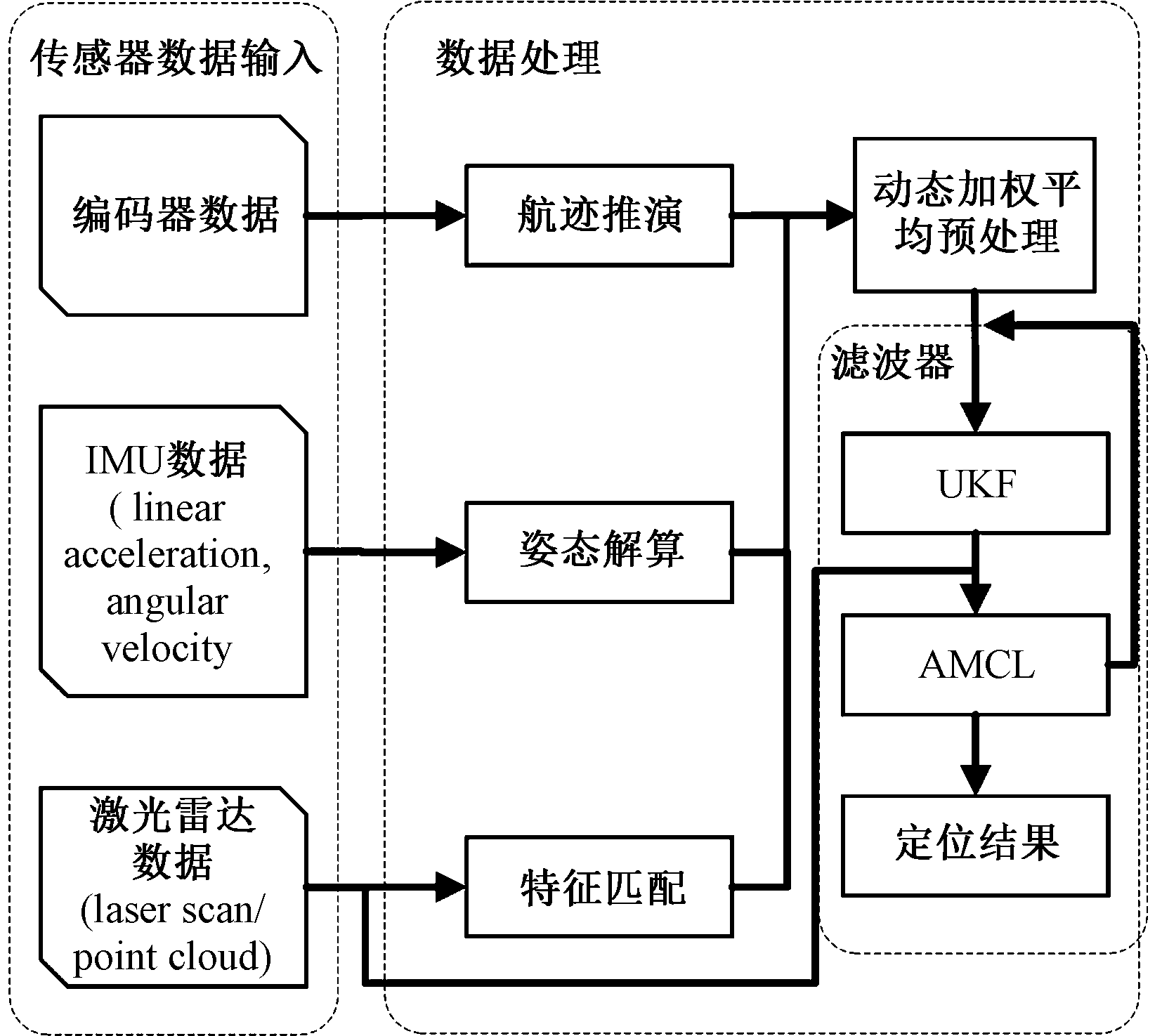
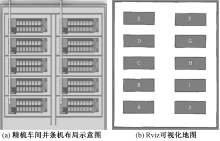
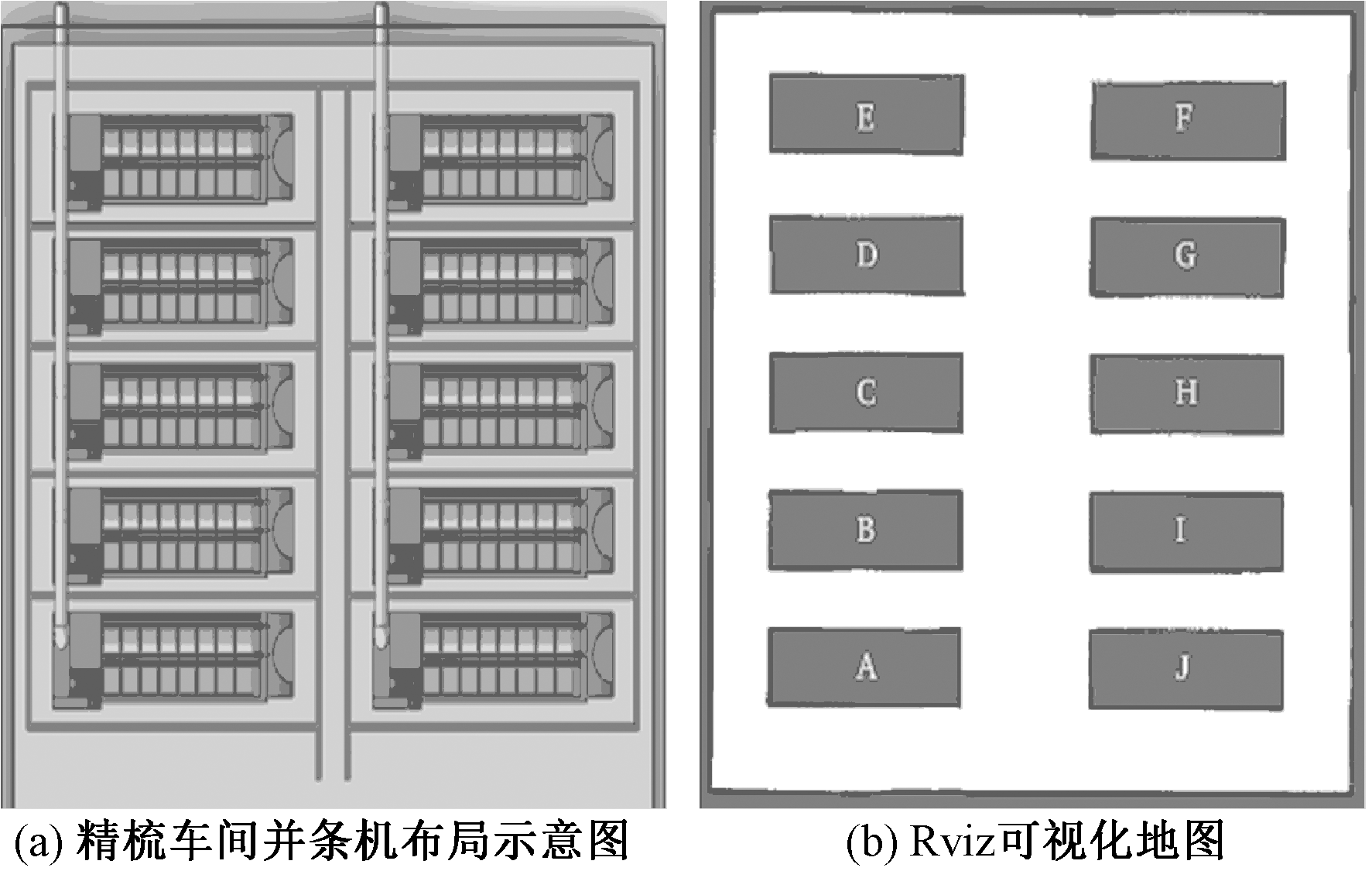
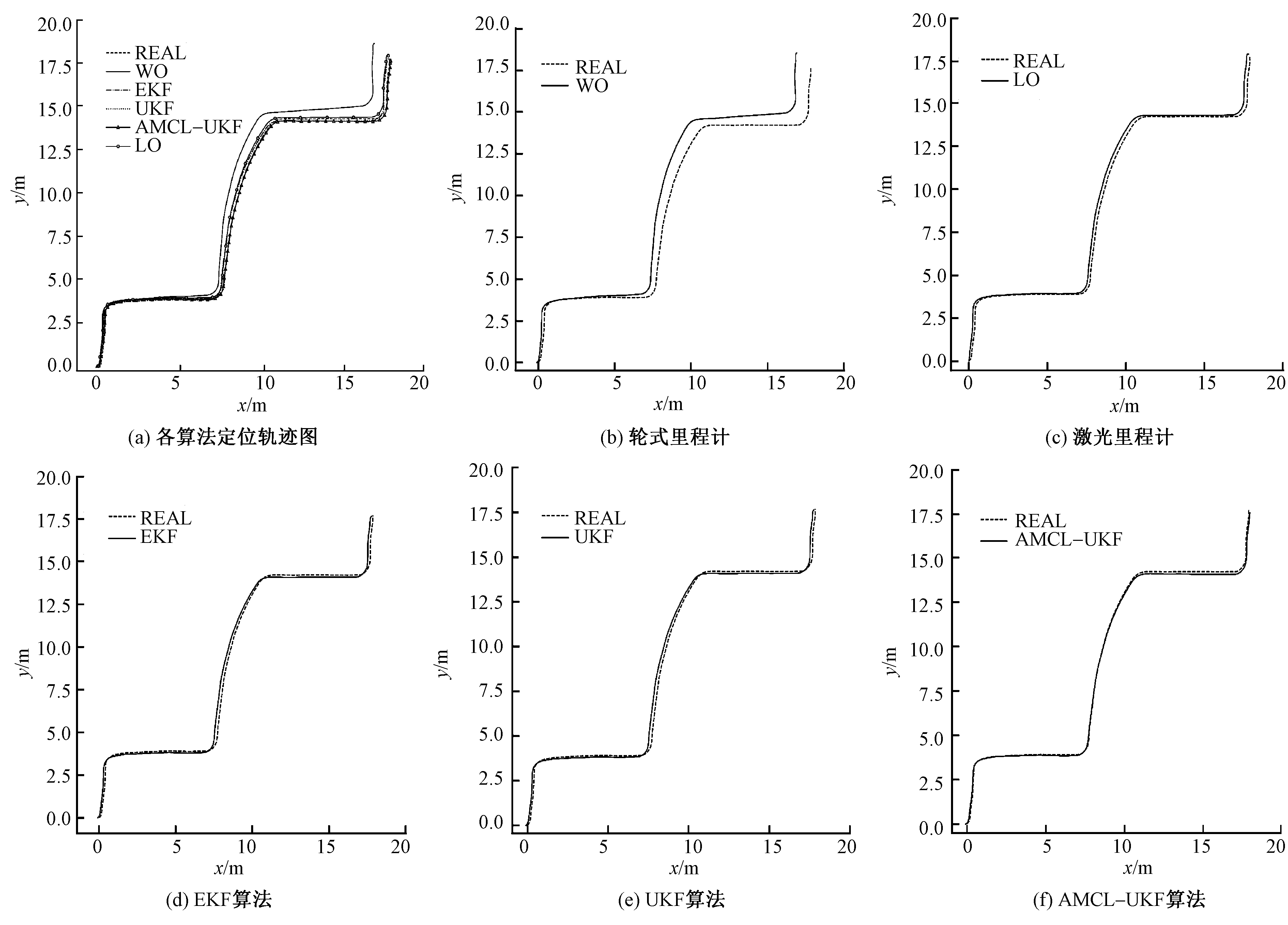
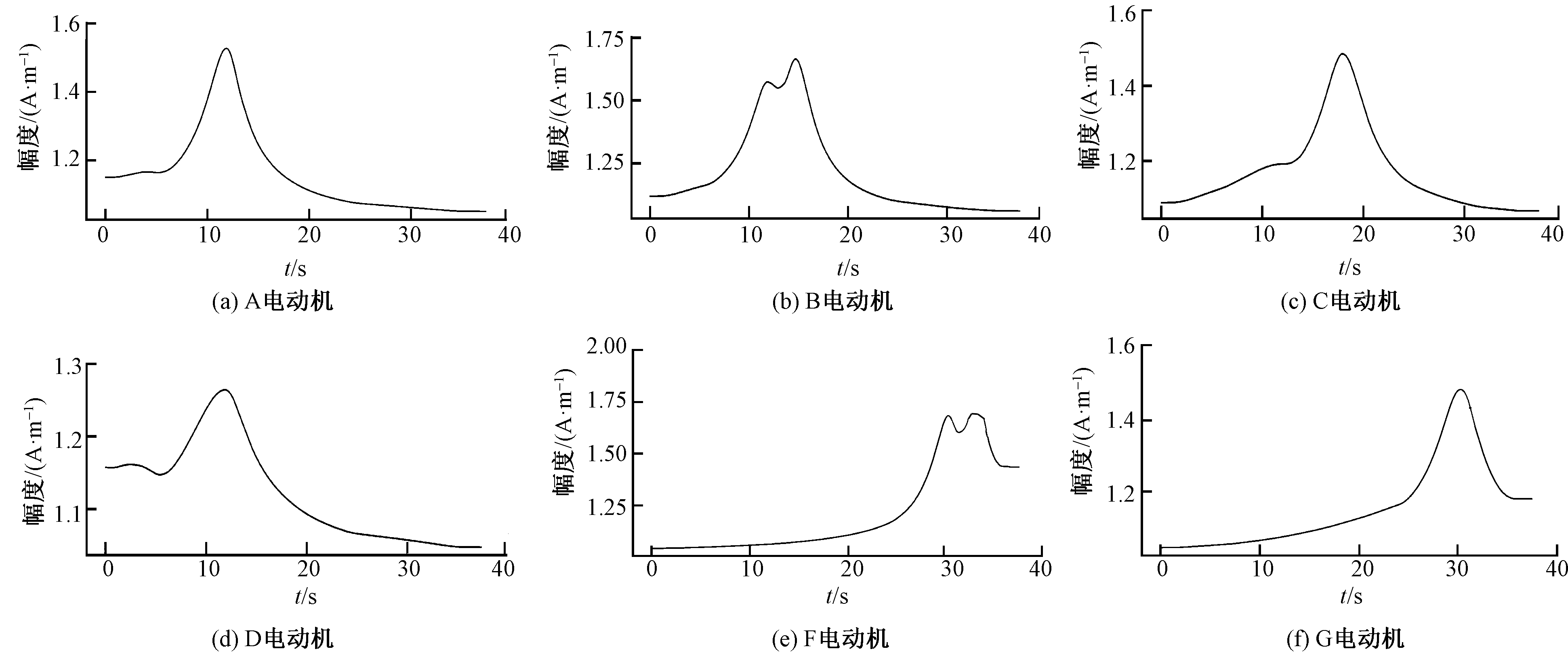
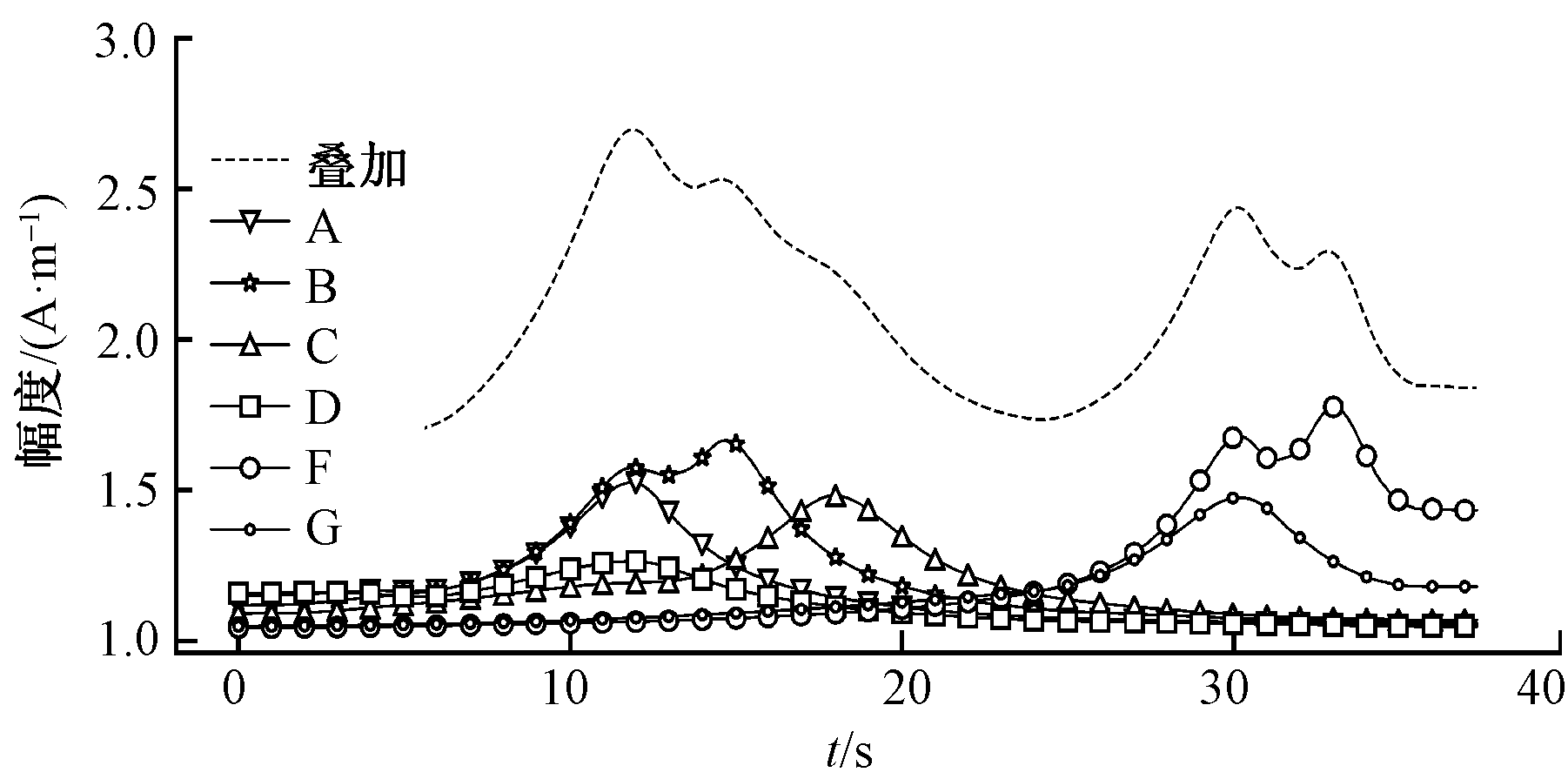
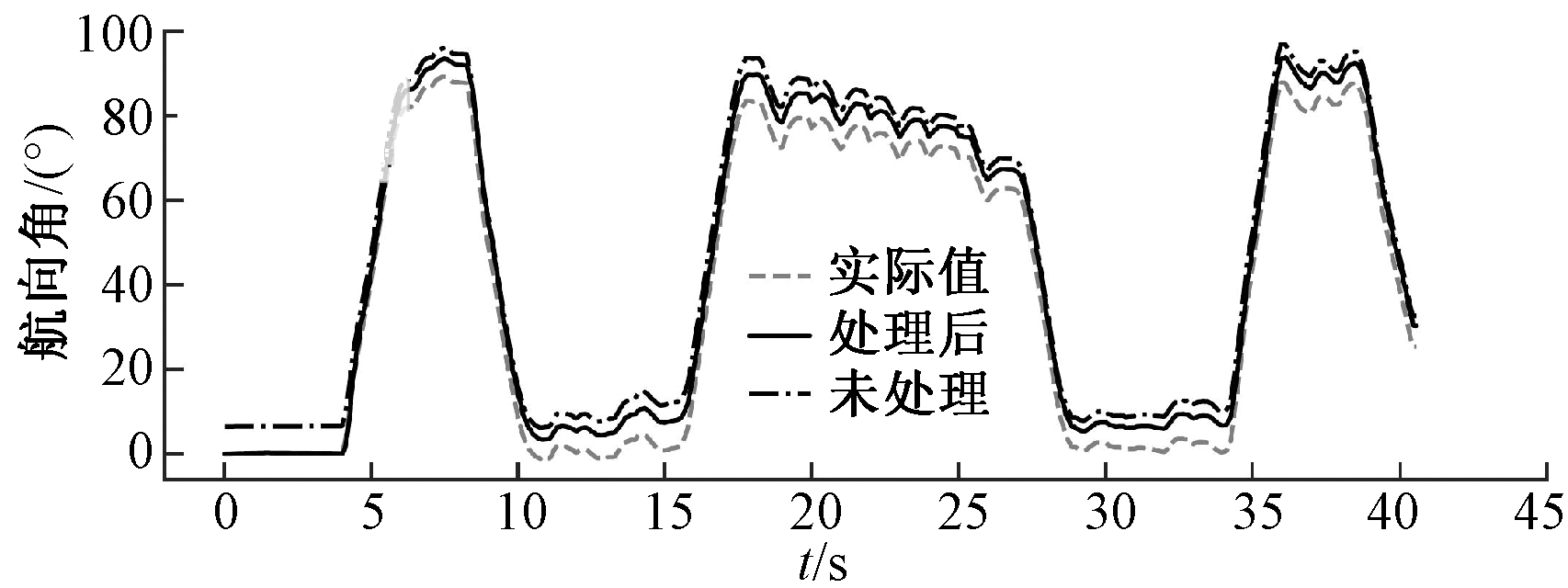
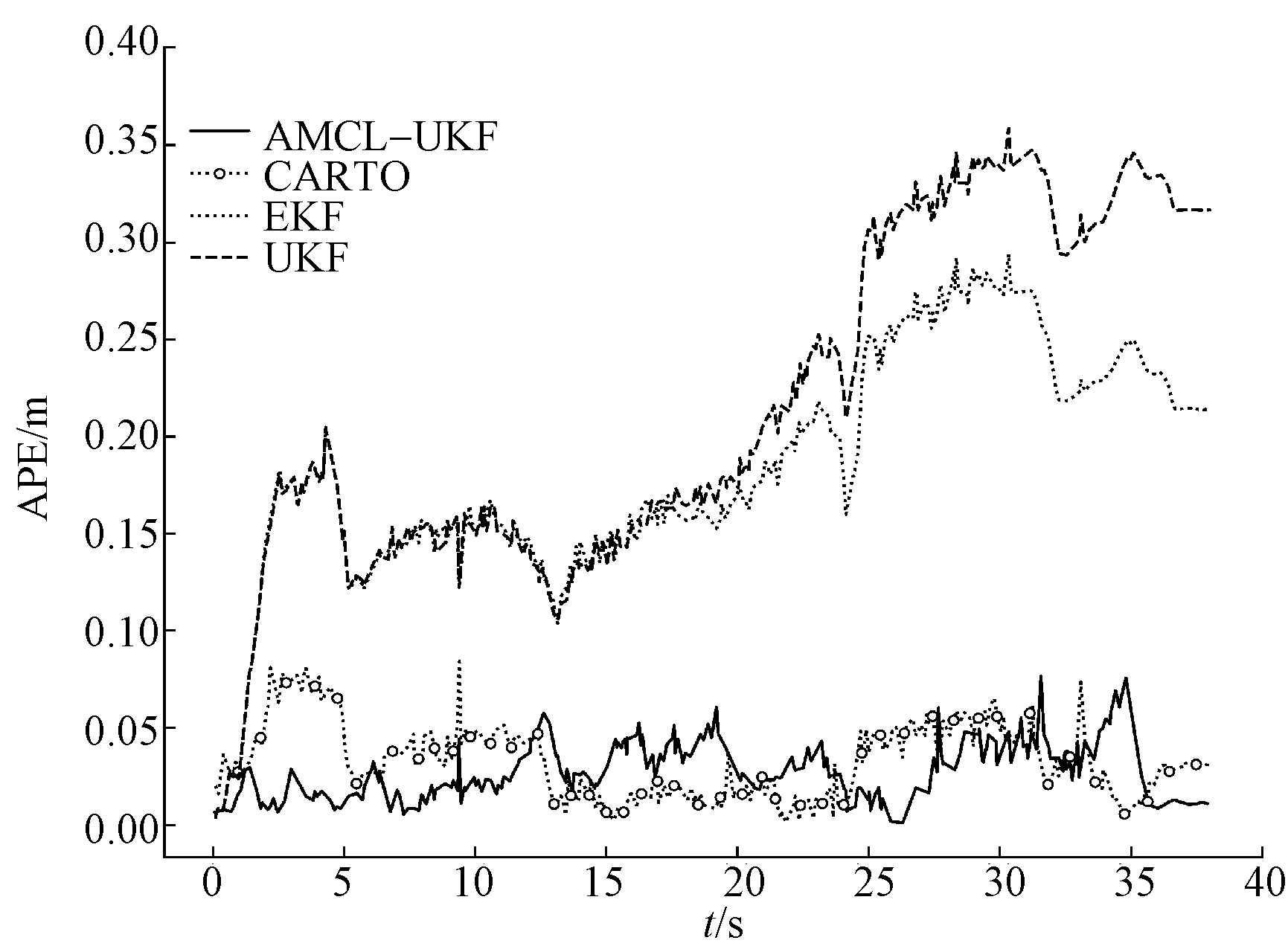
纺织行业的智能化、绿色化是“双碳”战略中必须进行升级的内容,移动机器人的大量应用将是未来趋势,但是各类纺机中的电动机、传动机构等在生产过程中产生的电磁环境不利于机器人定位。为解决上述问题,提出一种多传感器混合滤波方法,通过结合基于自适应蒙特卡洛定位(adaptive Mentcarto localization,AMCL)方法和无迹卡尔曼滤波(unscented Kalman filter,UKF)融合定位来保证定位的精度;将AMCL与轮式里程计、惯性导航、激光里程计结合使用,根据惯性导航数据对各传感器数据进行预处理减少误差的引入;并通过UKF滤波器进行局部姿态估计。最后,基于机器人操作系统(ROS)框架,利用Gazebo仿真软件构建无、有电磁干扰的纺织车间环境进行试验。结果表明:在无电磁干扰的仿真环境中,AMCL-UKF混合滤波算法定位精度相较于扩展卡尔曼(extended Kalman filter,EKF)融合定位算法、UKF融合定位算法,精度分别提升26.9%、26.0%。在有电磁干扰环境中引入误差减小36.7%。提出的定位方法能够有效提高移动机器人室内定位的精度,对于纺织生产电磁环境下具有较好的稳定性。
中图分类号:
| [1] | 李珣, 何晶晶, 赵征凡, 等. 基于一致性改进模型的多机器人编队运动规划方法[J]. 西安工程大学学报, 2021, 35(3):44-53. |
| LI Xun, HE Jingjing, ZHAO Zhengfan, et al. Multi-robot formation motion planning method based on improved consistency model[J]. Journal of Xi'an Polytechnic University, 2021, 35(3):44-53. | |
| [2] | YU S, JIANG Z. Design of the navigation system through the fusion of IMU and wheeled encoders[J]. Computer Communications, 2020. DOI:10.1016/j.comcom.2020.07.009. |
| [3] | GAO Y, WANG F, LI J, et al. Localization of mobile robot based on multi-sensor fusion[C]// 2020 Chinese Control And Decision Conference (CCDC). Heifei:IEEE, 2020: 4367-4372. |
| [4] | 张书亮, 谭向全, 吴清文. 基于多传感器融合技术的室内移动机器人定位研究[J]. 传感器与微系统, 2021, 40(8):4. |
| ZHANG Shuliang, TAN Xiangquan, WU Qingwen. Localization of indoor mobile robot based on multi-sensor fusion technology[J]. Sensor and MicroSystem, 2021, 40(8):4. | |
| [5] | LU C, ZHANG W, CHEN F. Positioning of wheeled robot on spherical tank based on improved EKF[C]// 2019 IEEE 4th Advanced Information Technology, Electronic and Automation Control Confer-ence(IAEAC). Chengdu:IEEE, 2019: 1732-1736. |
| [6] | JULIER S J, UHIMANN J K. New extension of the Kalman filter to nonlinear systems[J]. Signal Processing, Sensor Fusion, and Target Recognition VI, 1997.DOI: 10.1117/12.280797. |
| [7] | LUIGI D, LUCIA W, MURACA P, et al. Mobile robot localization via EKF and UKF: a comparison based on real data[J]. Robotics and Autonomous Systems, 2015, 74: 122-127. |
| [8] | 刘慧, 姜雨汐. 室内移动机器人实时定位滤波算法仿真对比[J]. 北京建筑大学学报, 2021, 37(4):8. |
| LIU Hui, JIANG Yuxi. Simulation comparison of real-time positioning filtering algorithm for indoor mobile robot[J]. Journal of Beijing University of Civil Engineering and Architecture, 2021, 37(4):8. | |
| [9] | 尹建军, 余承超, 贺坤, 等. 磁导引与UKF滤波定位的轮式AGV路径跟踪研究[J]. 机械设计与制造, 2021(7):5. |
| YIN Jianjun, YU Chengchao, HE Kun, et al. Research on path tracking of wheeled AGV based on magnetic guidance and UKF filter positioning[J]. Machinery Design & Manufacture, 2021(7):5. | |
| [10] | 洪宇, 李胜, 郭健, 等. 基于自适应无迹卡尔曼的机器人室内定位算法[J]. 计算机测量与控制, 2018, 26(1):238-241,247. |
| HONG Yu, LI Sheng, GUO Jian, et al. Machine based on adaptive unscented Kalman Indoor positioning algorithm[J] Computer Measurement and Control, 2018, 26 (1): 238-241,247. | |
| [11] | PARK S, HWANG J P, KIM E, et al. A new evolutionary particle filter for the prevention of sample impoverishment[J]. IEEE Transactions on Evolutionary Computation, 2009, 13(4):801-809. |
| [12] | GUAN R P, RISTIC B, WANG L, et al. KLD Sampling with gmapping proposal for monte carlo localization of mobile robots[J]. Information Fusion, 2018, 49:79-88. |
| [13] | QIAN J, ZI B, WANG D, et al. The design and development of an omni-directional mobile robot oriented to an intelligent manufacturing system[J]. Sensors, 2017, 17(9):1-7. |
| [14] | LI X, ZHANG Z, WU D D, et al. A multi-robot allocation model for multi-object based on global optimal evaluation of revenue[J]. International Journal of Advanced Robotic Systems, 2021.DOI:10.1177/17298814211060650. |
| [15] | LI X, WU D, HE J, et al. An improved method of particle swarm optimization for path planning of mobile robot[J]. Journal of Control Science and Engineering, 2020.DOI:10.1155/2020/3857894. |
| [16] | ULLAH I, SHEN Y, SU X, et al. A localization based on unscented Kalman filter and particle filter localization algorithms[J]. IEEE Access, 2019, 8: 2233-2246. |
| [17] | KUDRIASHOV A, BURATOWSKI T, GIERGIEL M. Hybrid AMCL-EKF filtering for SLAM-based pose estimation in rough terrain[C]// Advances in Mechanism and Machine Science: Proceedings of the 15th IFToMM World Congress on Mechanism and Machine Science 15. Berlin:Springer International Publishing, 2019: 2819-2828. |
| [18] | 叶黎明. 复杂路况下轮式机器人的位姿估计[D]. 石家庄: 石家庄铁道大学, 2021:1-50. |
| YE Liming. Wheeled robot pose estimation under complex road conditions[D]. Shijiazhuang: Shijiazhuang Railway University, 2021:1-50. | |
| [19] | JAIMEZ M, MONROY J G, GONZALEZ-JIMENEZ J. Planar odometry from a radial laser scanner. A range flow-based approach[C]// 2016 IEEE International Conference on Robotics and Automation (ICRA). Stockholm :IEEE, 2016: 4479-4485. |
| [20] | ZHOU G, LUO J, XU S, et al. An EKF-based multiple data fusion for mobile robot indoor localization[J]. Assembly Automation, 2021, 41(3): 274-282. |
| [21] | ZHAO M, ZHANG T, WANG D. A high precision indoor positioning method based on UKF[J]. Journal of Intelligent & Fuzzy Systems, 2022, 42(4): 3639-3652. |
| [22] | 范冰飞. 人体运动姿态传感器抗磁场和大加速度干扰的方法及其步态分析应用研究[D]. 杭州: 浙江大学, 2019:1-65. |
| FAN Bingfei. Research on anti-magnetic field and acceleration interference method of human motion posture sensor and its gait analysis application[D]. Hangzhou: Zhejiang University, 2019:1-65. | |
| [23] | 赵芸, 赵敏. 移动机器人CartographerSLAM建图改进研究[J]. 软件导刊, 2021.DOI:10.11907/rjdk.201562. |
| ZHAO Yun, ZHAO Min. Research on improvement of mobile robot CartographerSLAM mapping[J]. Software Guide, 2021. DOI:10.11907/rjdk.201562. |
| [1] | 许高平, 孙以泽. 移动机械臂牵引卷装纱线的动态建模与控制[J]. 纺织学报, 2024, 45(01): 1-11. |
| [2] | 黄晨静, 张蕾, 孙逊, 王晓华. 基于动力学模型的面料抓取机械臂轨迹跟踪控制方法[J]. 纺织学报, 2023, 44(06): 207-214. |
| [3] | 宋洁心, 付天宇, 李凤鸣, 宋锐, 李贻斌. 基于延展性的机器人面料缝制张力预测方法[J]. 纺织学报, 2022, 43(12): 173-180. |
| [4] | 张洁, 徐楚桥, 汪俊亮, 郑小虎. 数据驱动的机器人化纺织生产智能管控系统研究进展[J]. 纺织学报, 2022, 43(09): 1-10. |
| [5] | 莫帅, 周长鹏, 李旭, 杨振宁, 刘辉华, 高瀚君. 机器人智能关节驱控结构一体化设计方法研究[J]. 纺织学报, 2022, 43(03): 160-167. |
| [6] | 王晓华, 王育合, 张蕾, 王文杰. 缝纫机器人对织物张力与位置的模糊阻抗控制[J]. 纺织学报, 2021, 42(11): 173-178. |
| [7] | 李珣, 南恺恺, 赵征凡, 王晓华, 景军锋. 多智能体博弈的纺织车间搬运机器人任务分配[J]. 纺织学报, 2020, 41(07): 78-87. |
| [8] | 王晓华, 姚炜铭, 王文杰, 张蕾, 李鹏飞. 基于改进YOLO深度卷积神经网络的缝纫手势检测[J]. 纺织学报, 2020, 41(04): 142-148. |
| [9] | 徐 磊;王 瑞;张淑洁. Ni-Ti形状记忆合金纤维相变的电阻特性[J]. 纺织学报, 2010, 31(3): 15-19. |
|
||
 京公网安备11010502044800号
京公网安备11010502044800号