纺织学报 ›› 2025, Vol. 46 ›› Issue (01): 197-205.doi: 10.13475/j.fzxb.20240404201
王建萍1,2,3,4, 翁雨鑫1,2,3, 沈津竹1,2,3( ), 张帆5, 刘霂珂1
), 张帆5, 刘霂珂1
WANG Jianping1,2,3,4, WENG Yuxin1,2,3, SHEN Jinzhu1,2,3(), ZHANG Fan5, LIU Xianke1
摘要:
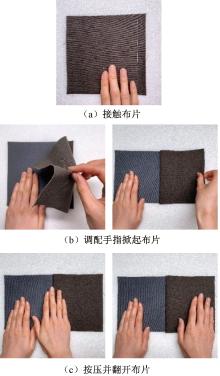
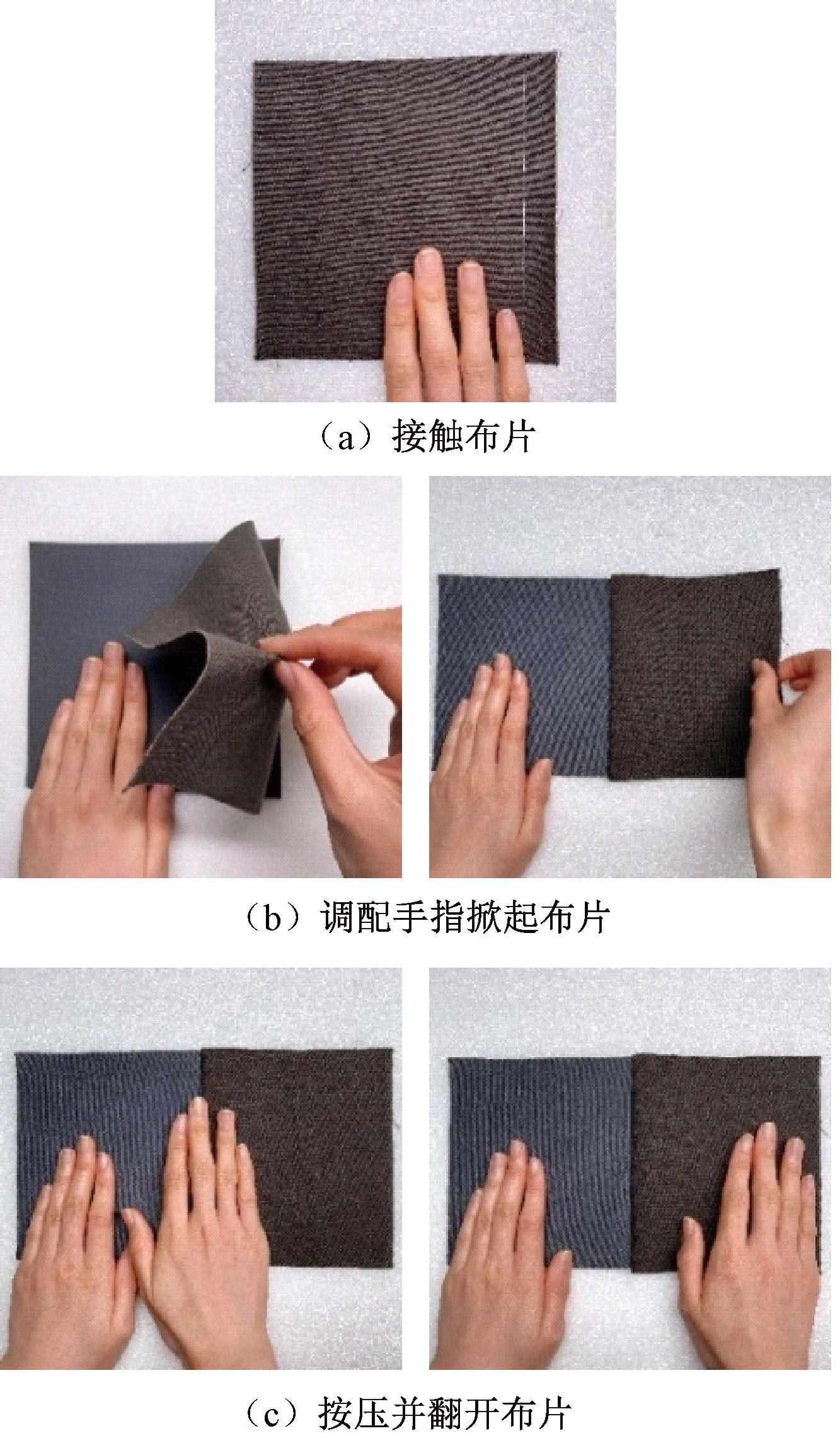
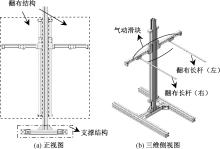
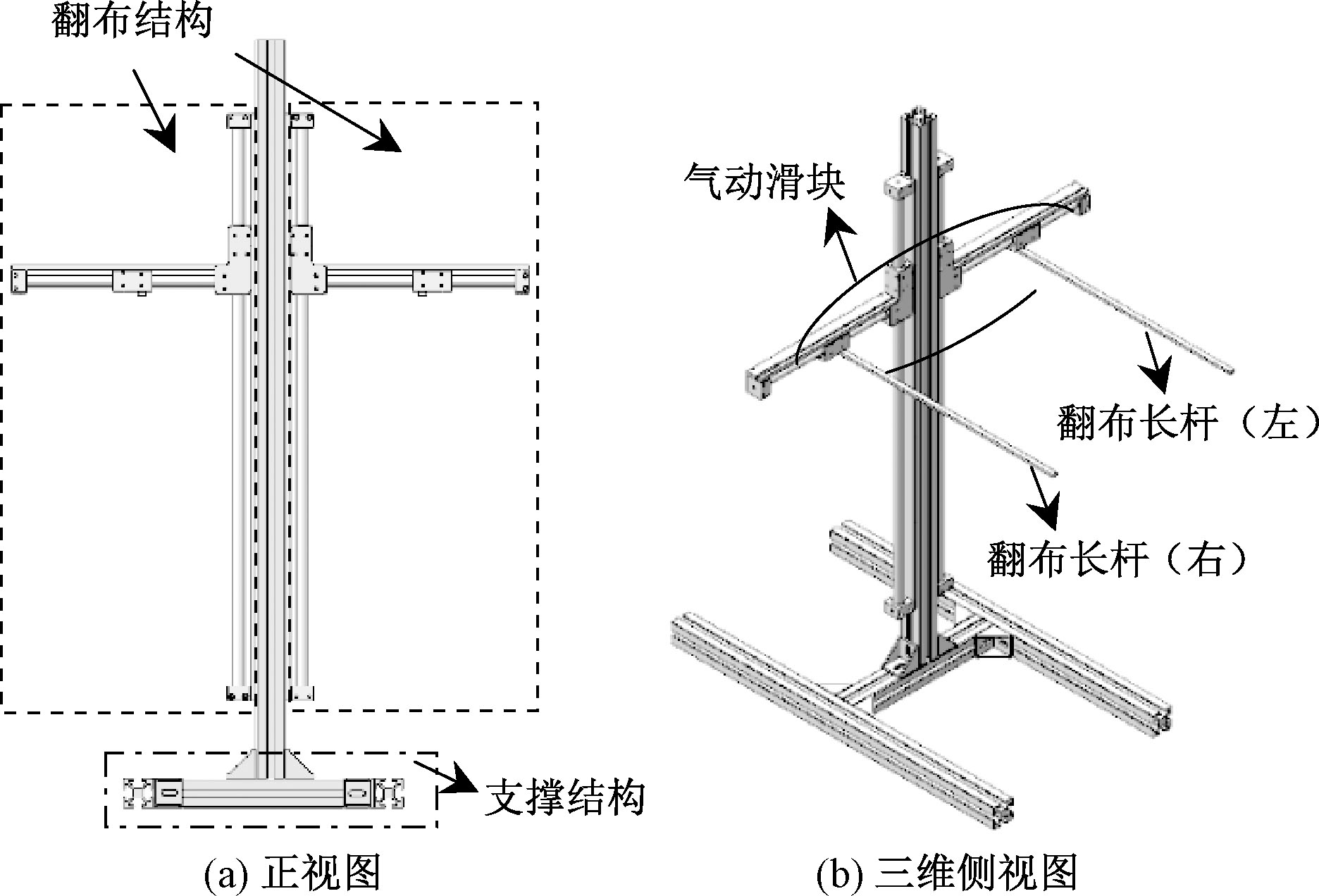
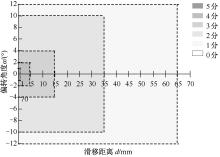
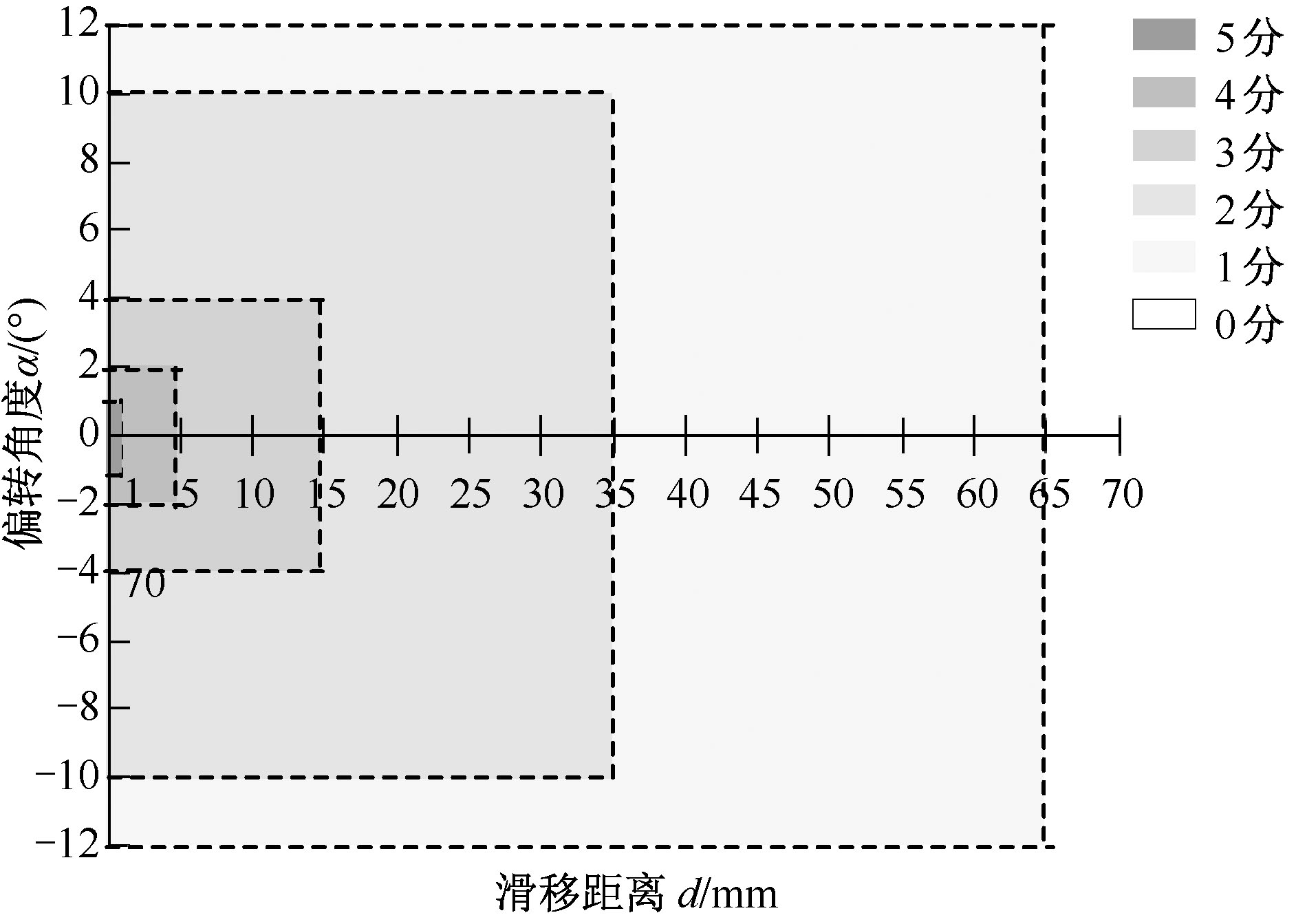
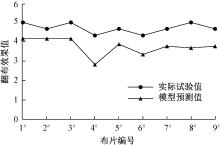
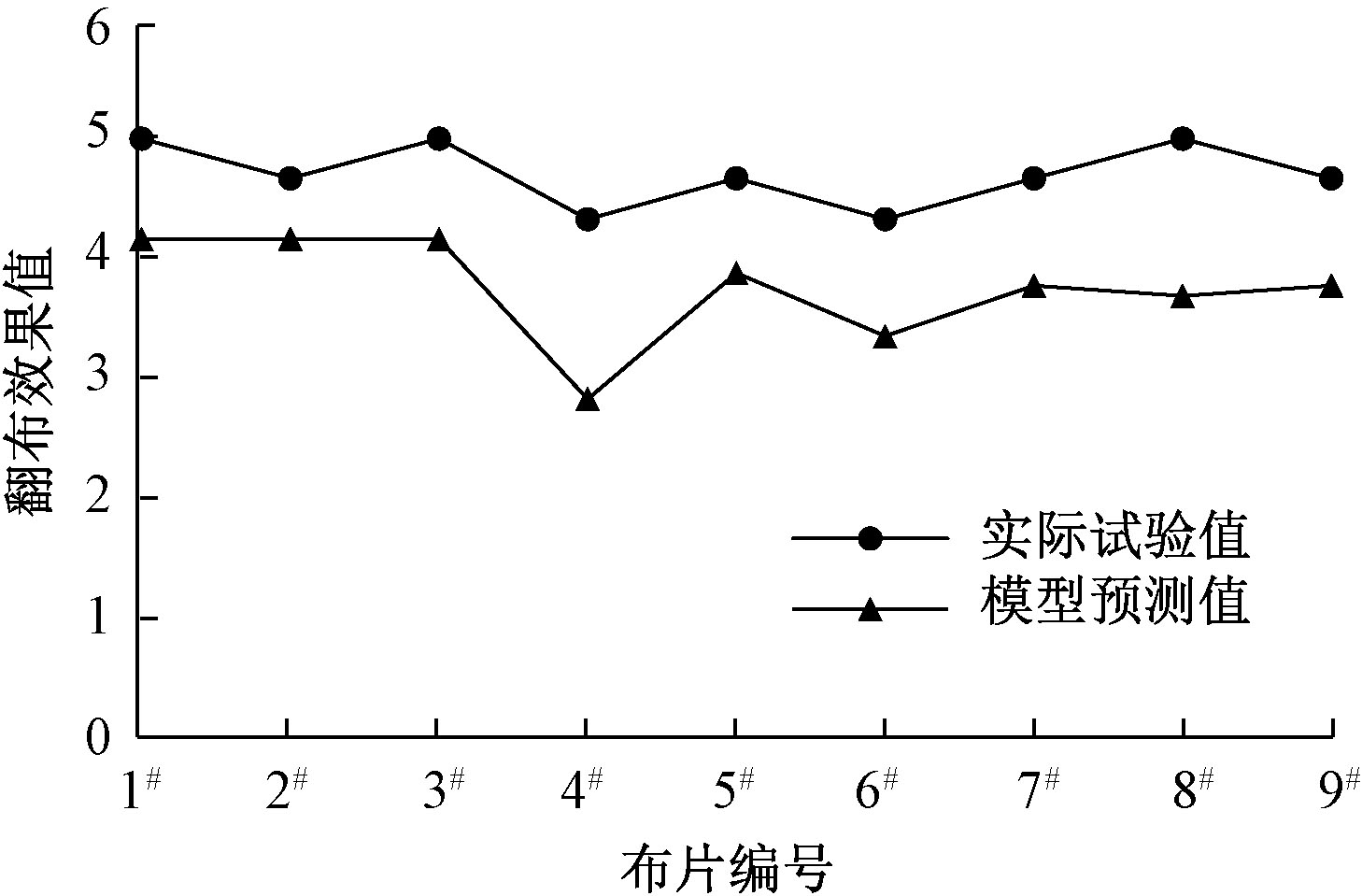
为实现缝纫工序中自动化设备间的无缝衔接,提高协同工作效率,采用气动驱动装置驱动杆件直线移动来模拟人手的翻布动作,设计了一种自动翻布装置,可完全替代人手操作,在软体手指的配合下完成面料的自动抓取、分离,并将缝合后的2层布片自动展平;在此基础上归纳了影响该翻布装置效果的因素,从布片偏转角度和偏移距离2个维度评价其翻布效果,建立了二维5级评价模型。然后选取3种市面上常见的面料,完成2层布片缝合操作后,通过正交试验分别分析其在5、10和15 mm缝份下的最优翻布工艺因素配伍方案,并结合多元回归分析方法建立基于织物性能的翻布效果预测模型。验证结果表明,该预测模型的预测准确率为80%,具有较好的预测性和参考价值,可有效减少人工干预,提高生产一致性,促进服装生产全自动智能化发展。
中图分类号:
| [1] | 王友发, 周献中. 国内外智能制造研究热点与发展趋势[J]. 中国科技论坛, 2016 (4): 154-160. |
| WANG Youfa, ZHOU Xianzhong. A review of research on domestic and international intelligent manu-facturing[J]. Forum on Science and Technology in China, 2016 (4): 154-60. | |
| [2] | 霍嫱. 智能制造技术在纺织服装业的发展趋势分析[J]. 西部皮革, 2022, 44(22): 18-20. |
| HUO Qiang. Analysis of the development trend of intelligent manufacturing technology in textile and garment industry[J]. West Leather, 2022, 44(22): 18-20. | |
| [3] | 墨影, 孟庆杰. 服装智能制造进行时[J]. 纺织机械, 2016 (6): 28-29. |
| MO Ying, MENG Qingjie. Ongoing intelligent manufacturing in the apparel industry[J]. Textile Machinery, 2016 (6): 28-29. | |
| [4] | YUBA H, ARNOLD S, YAMAZAKI K. Unfolding of a rectangular cloth from unarranged starting shapes by a dual-armed robot with a mechanism for managing recognition error and uncertainty[J]. Advanced Robotics, 2017, 31(10): 544-556. |
| [5] | 沈津竹. 基于软体手指的服装裁片堆垛抓取模型研究[D]. 无锡: 江南大学, 2022:25-37. |
| SHEN Jinzhu. Grasping model of garment cutting pieces for robotic soft fingers[D]. Wuxi: Jiangnan University, 2022: 25-37. | |
| [6] | YAMAZAKI K, ABE T. A versatile end-effector for pick-and-release of fabric parts[J]. IEEE Robot Autom Let, 2021, 6(2): 1431-1438. |
| [7] | 高晓飞, 齐立哲, 孙云权. 面向柔性面料立体缝纫的随形机械手设计[J]. 纺织学报, 2022, 43(9): 27-33. |
| GAO Xiaofei, QI Lizhe, SUN Yunquan. Design of shape-following manipulator for three-dimensional sewing of flexible fabrics[J]. Journal of Textile Research, 2022, 43(9): 27-33. | |
| [8] | LEE S, RHO S, LIM D, et al. A basic study on establishing the automatic sewing process according to textile properties[J]. Processes, 2021. DOI:10.3390/pr9071206. |
| [9] | YOSHIMI T, TAKEZAWA K, HIRAYAMA M. An improvement of trajectory tracking accuracy of automatic sewing robot system by variable gain learning control[J]. IFAC-Papers On Line, 2018, 51(22): 1-6. |
| [10] | SHUNGO T, HISASHI D. Development of fabric feed mechanism using horizontal articulated dual manipulator for automated sewing [C]// 17th IEEE International Conference on Automation Science and Enginee-ring (CASE). New York: IEEE, 2021: 1832-1837. |
| [11] | 李晓茜, 章煜佳, 农苑樱. 基于图像识别的家用自动蒸汽熨烫装置[J]. 科学技术创新, 2020 (36): 191-192. |
| LI Xiaoqian, ZHANG Yujia, NONG Yuanying. Home automatic steam ironing device based on image recognition[J]. Scientific and Technological Innovation, 2020 (36): 191-192. | |
| [12] | 王文学. 针织服装标志自动熨烫装置的设计[J]. 针织工业, 2011(12): 43-44. |
| WANG Wenxue. Design of automatic ironing device for knitwear logo[J]. Knitting Industries, 2011(12): 43-44. | |
| [13] | 陈旭, 谢战争, 徐梦龙, 等.一种翻布机:202323055180.7 [P]. 2024-05-10. |
| CHEN Xu, XIE Zhanzheng, XU Menglong, et al. A cloth turning machine: 202323055180.7 [P]. 2024-05-10. | |
| [14] | 黄鹏, 黄从友, 吴欣玮, 等.一种翻布装置:202321554443.6 [P]. 2023-12-29. |
| HUANG Peng, HUANG Congyou, WU Xinwei, et al. A cloth turning device: 202321554443.6 [P]. 2023-12-29. | |
| [15] | 李金庆, 王广彬, 王硕, 等.一种自动翻布机:202222175348.7 [P]. 2022-12-16. |
| LI Jinqing, WANG Guangbin, WANG Shuo, et al. An automatic cloth turning machine:202222175348.7 [P]. 2022-12-16. | |
| [16] | 陆宏, 张壮. 织物分层机构及单层织物抓取装置、打码机和翻布方法:202110570949.5 [P]. 2022-11-25. |
| LU Hong, ZHANG Zhuang. Fabric layering mechanism, single-layer fabric grasping device, coding machine and turning cloth method: 202110570949.5 [P]. 2022-11-25. | |
| [17] | SCHRIMPF J, WETTERWALD L E. Experiments towards automated sewing with a multi-robot system[C]// IEEE International Conference on Robotics and Automation (ICRA). New York: IEEE, 2012: 5258-5263. |
| [18] | SCHRIMPF J, WETTERWALD L E, LIND M, et al. Real-time system integration in a multi-robot sewing cell[C]// 25th IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). New York: IEEE, 2012: 2724-29. |
| [19] | 沈津竹, 苏军强. 软体机械手逐层分离服装裁片的影响因素[J]. 服装学报, 2021, 6(4): 357-365,373. |
| SHEN Jinzhu, SU Junqiang. Influence factors of the soft manipulator to separate the garment cutting pieces layer by layer[J]. Journal of Clothing Research, 2021, 6(4): 357-365,373. |
| [1] | 戴宁, 徐开心, 胡旭东, 徐郁山. 云边端协同下的织机设备信息采集与监测系统[J]. 纺织学报, 2024, 45(08): 215-224. |
| [2] | 王建萍, 沈津竹, 姚晓凤, 朱妍西, 张帆. 服装裁片自动抓取技术及其布局方法的研究进展[J]. 纺织学报, 2024, 45(06): 227-234. |
| [3] | 张伍连 丁辛 杨旭东. 方平组织PVC涂层膜材料的塑性变形性能[J]. 纺织学报, 2011, 32(7): 65-69. |
| [4] | 庄 鄂;王府梅;崔爱峰. 新合纤织物表面手感及摩擦性能的研究[J]. 纺织学报, 2002, 23(02): 23-25. |
| Viewed | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
Full text 24
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
Abstract 65
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
Cited |
|
|||||||||||||||||||||||||||||||||||||||||||||||||
| Shared | ||||||||||||||||||||||||||||||||||||||||||||||||||
| Discussed | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
||
 京公网安备11010502044800号
京公网安备11010502044800号