纺织学报 ›› 2025, Vol. 46 ›› Issue (02): 92-99.doi: 10.13475/j.fzxb.20240904301
王罗俊1,2, 彭来湖1( ), 熊叙一1, 李杨2, 胡旭东1
), 熊叙一1, 李杨2, 胡旭东1
WANG Luojun1,2, PENG Laihu1(), XIONG Xuyi1, LI Yang2, HU Xudong1
摘要:
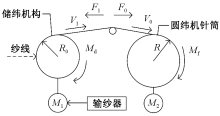
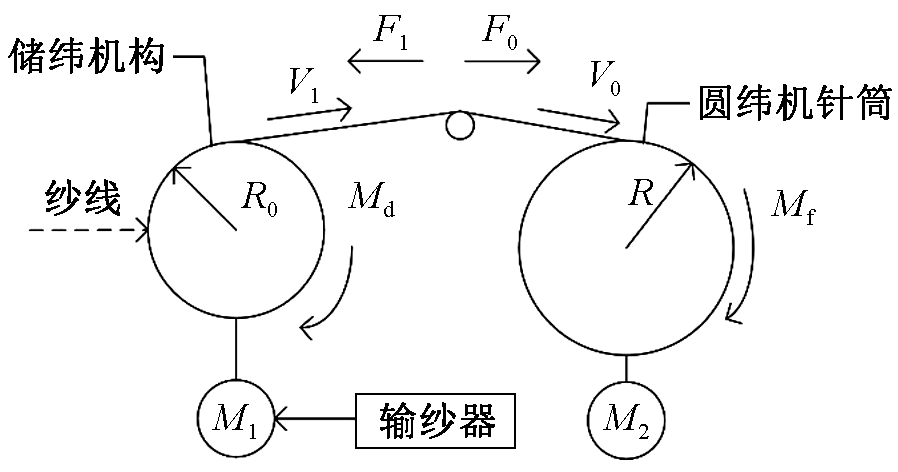
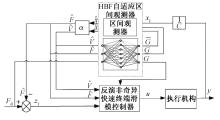
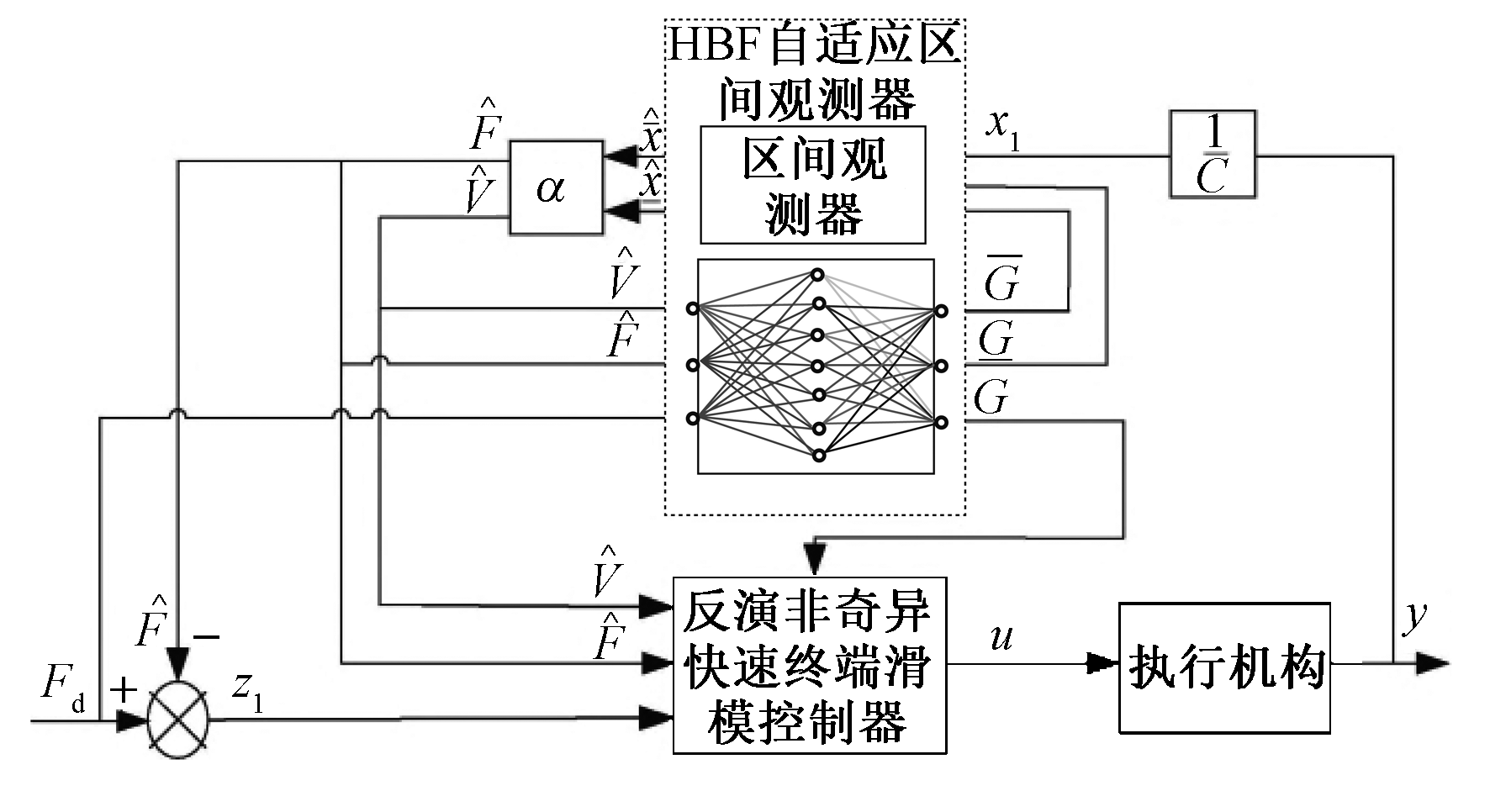
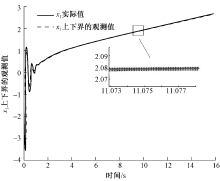
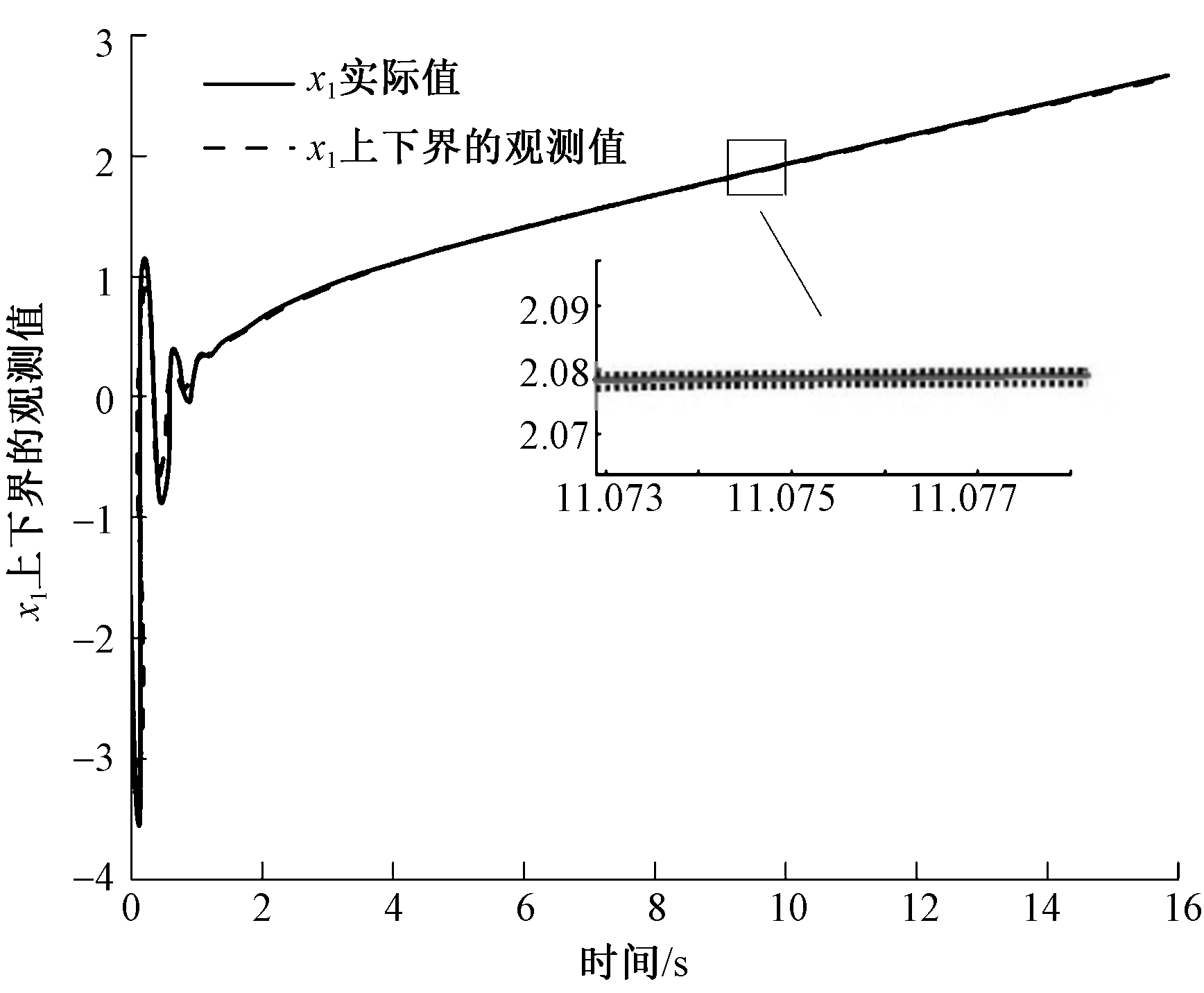
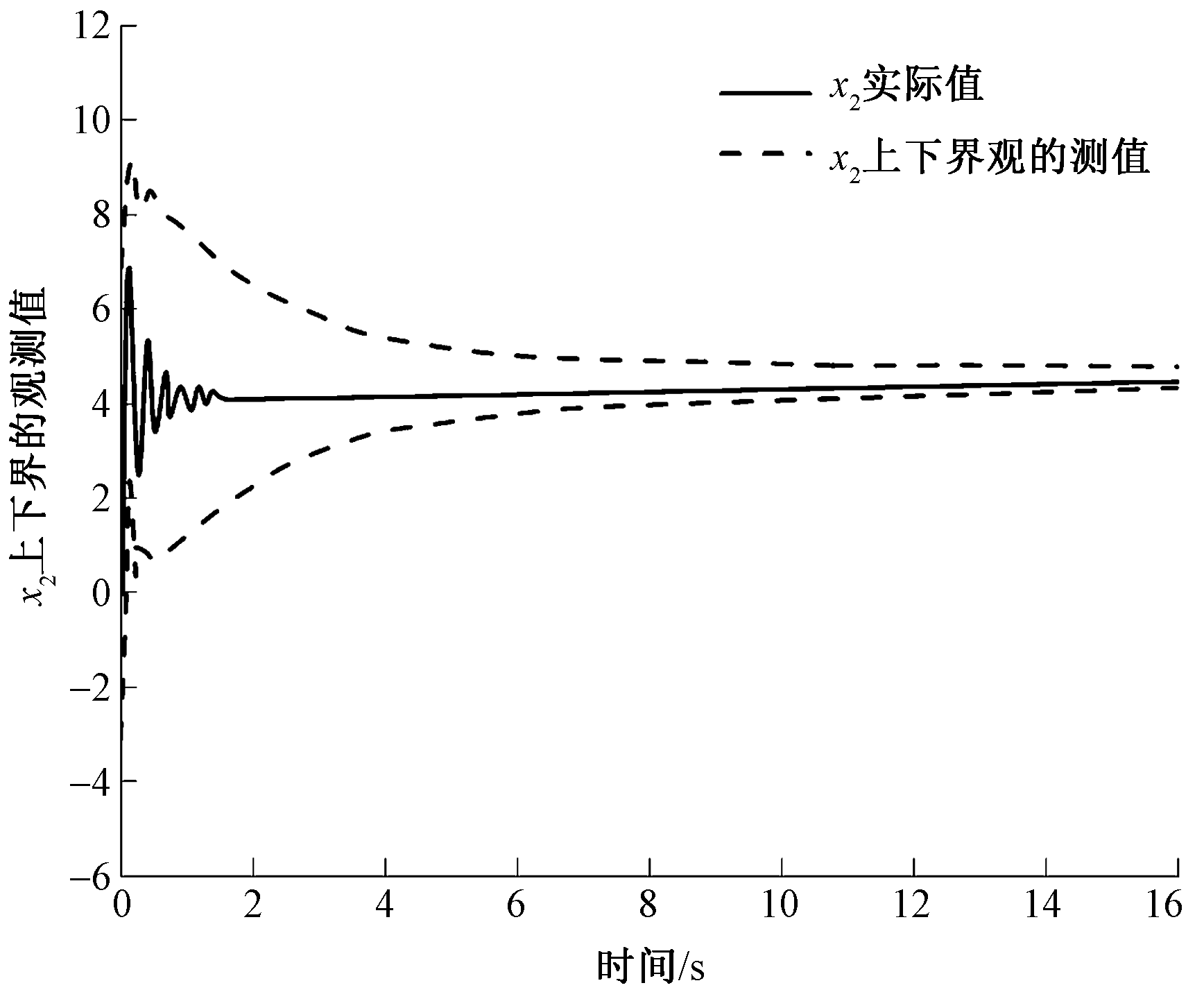
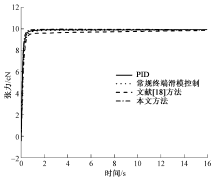
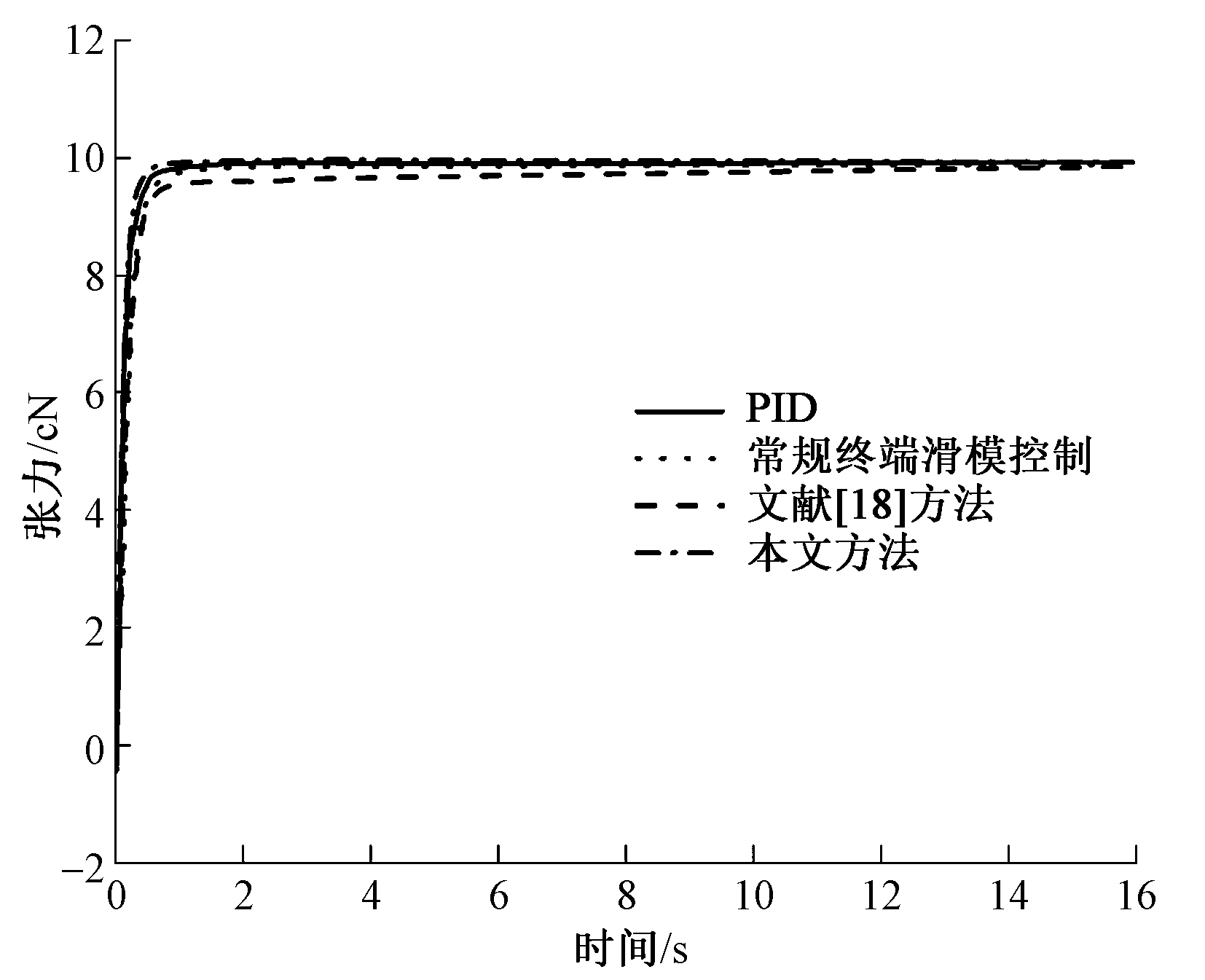
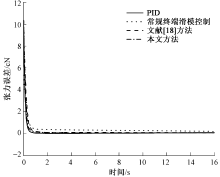
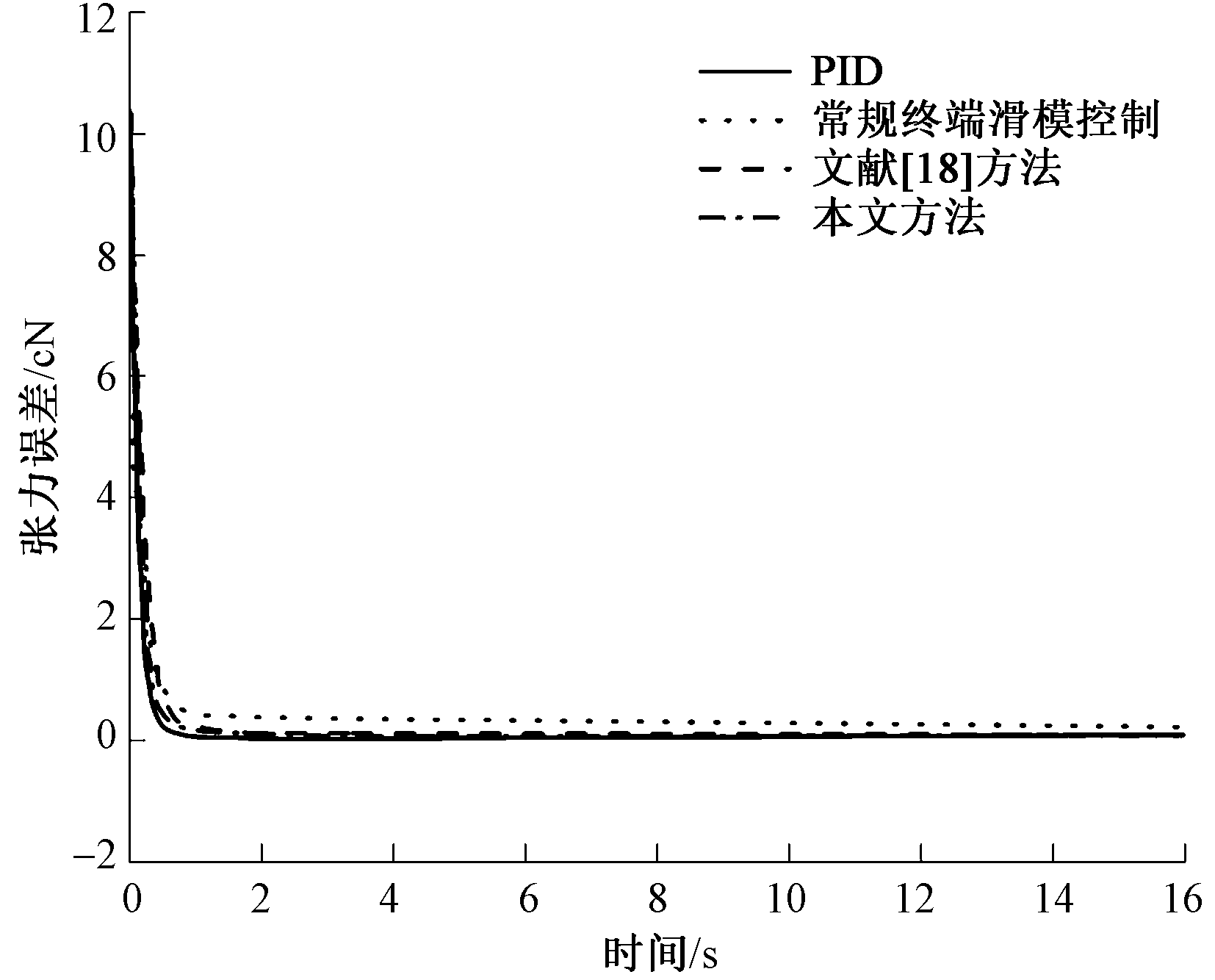
为解决针织圆机高速工作时纱线张力波动较大问题,提出了一种基于超级基(HBF)神经网络区间观测器的反演非奇异滑模纱线恒张力控制方法。通过构建运动纱线系统的数学模型,运用神经网络逼近系统参数(输纱器与编织机构转动惯量)变动所导致的不确定性响应,将HBF神经网络与区间观测器相结合设计了一个区间状态观测器,估算出系统转速及纱线张力的边界范围,提高了状态识别的准确性。基于纱线张力估算值,构建反演非奇异终极滑模控制器,确保了张力跟踪误差能够在短时间内迅速收敛,从而增强了系统的鲁棒性与动态响应能力。仿真和实验结果表明:所提控制方法成功地使运动纱线张力在1.6 s内达到并维持在预设值,调节时间相较于标准滑模控制及现有文献中的滑模控制器分别缩短了57%和33%,验证了该控制算法的高效性与可靠性。
中图分类号:
| [1] | 李杨, 彭来湖, 刘建廷, 等. 基于横向振动频率的轴向运动纱线张力测量[J]. 纺织学报, 2023, 44(6): 72-77. |
| LI Yang, PENG Laihu, LIU Jianting, et al. Axial yarn tension measurement based on transverse vibration frequency[J]. Journal of Textile Research, 2023, 44(6): 72-77. | |
| [2] | 章钰娟, 彭来湖, 徐郁山, 等. 非接触式纱线状态检测技术研究[J]. 现代纺织技术, 2021(10): 1-10. |
| ZHANG Yujuan, PENG Laihu, XU Yushan, et al. Research on non-contact yarn state detection techno-logy[J]. Advanced Textile Technology, 2021(10): 1-10. | |
| [3] | 成玲, 梁银铮. 纱线的动态力学性能[J]. 纺织学报, 2006, 27 (8): 19-21. |
| CHENG Ling, LIANG Yinzheng. The dynamic mechanics performance of the yarn [J]. Journal of Textile Research, 2006, 27(8): 19-21. | |
| [4] |
戴宁, 胡旭东, 彭来湖. 针织大圆机运动实时控制技术[J]. 纺织学报, 2019, 40(12): 134-139.
doi: 10.13475/j.fzxb.20180705606 |
|
DAI Ning, HU Xudong, PENG Laihu. Real time motion control technology circular knitting machine[J]. Journal of Textile Research, 2019, 40(12): 134-139.
doi: 10.13475/j.fzxb.20180705606 |
|
| [5] | 周俊儒, 林光兴, 张彦, 等. 圆纬机智能送纱系统开发与技术优势分析[J]. 纺织导报, 2022(6): 80-83. |
| ZHOU Junru, LIN Guangxing, ZHANG Yan, et al. Development and technical advantage analysis of intelligent yarn feeding system for circular weft knitting machine[J]. China Textile Leader, 2022(6): 80-83. | |
| [6] | 周佳超. 高弹细纱输送动态控制技术[D]. 杭州: 浙江理工大学, 2021:14-18. |
| ZHOU Jiachao. Dynamic control technology of high elastic yarn conveying[D]. Hangzhou: Zhejiang Sci-Tech University, 2021:14-18. | |
| [7] | 李雪娇. 短纤纱高速经编动态张力调控系统研究[D]. 无锡: 江南大学, 2022:14-16. |
| LI Xuejiao. Research on dynamic tension control system for high speed warp knitting of staple fiber yarn[D]. Wuxi: Jiangnan University, 2022:14-16. | |
| [8] |
ALI M, AHMED R, AMER M. Yarn tension control technique for improving polyester soft winding process[J]. Scientific Reports, 2021, 11(1):1060-1075.
doi: 10.1038/s41598-020-79928-1 pmid: 33441729 |
| [9] | ANDRE, MATTHES, CHOKRI, et al. Analysis and simulation of yarn feeding at high dynamic circular knitting machines[J]. Melliand Interna-tional(Worldwide Textile Journal), 2010, 16(5/6):220-222. |
| [10] | 李鹏飞, 高文根, 张港, 等. 基于改进SMO的无传感器IPMSM 转子位置估计[J]. 电子测量与仪器学报, 2021, 35(9):65-72. |
| LI Pengfei, GAO Wengen, ZHANG Gang, et al. Sensorless IPMSM rotor position estimation based on improved smo[J]. Journal of Electronic Measurement and Instrumentation, 2021, 35 (9): 65-72. | |
| [11] | 易泽仁, 谢巍, 刘龙文, 等. 一类非线性系统的神经网络自适应区间观测器设计[J]. 控制理论与应用, 2023, 40(10):1730-1736. |
| YI Zeren, XIE Wei, LIU Longwen, et al. Design of neural network adaptive interval observer for a class of nonlinear systems[J]. Control Theory and Applications, 2023, 40 (10): 1730-1736. | |
| [12] | 胡军剑. 大惯性电液张力模拟绞车系统的动特性及张力控制研究[D]. 杭州: 浙江大学, 2020:12-13. |
| HU Junjian. Research on dynamic characteristics and tension control of large inertia electro-hydraulic tension simulation winch system[D]. Hangzhou: Zhejiang University, 2020:12-13. | |
| [13] | 楚晓艳, 年晓红, 刘静静. 基于鲁棒滑模观测器的多电机卷绕系统故障检测和隔离[J]. 控制理论与应用, 2018, 35(6):795-804. |
| CHU Xiaoyan, NIAN Xiaohong, LIU Jingjing. Fault detection and isolation of multi motor winding system based on robust sliding mode observer[J]. Control Theory and Application, 2018, 35(6): 795-804. | |
| [14] | 郁明, 李旺林, 蓝盾. 基于优化自适应阈值的非线性机电系统传感器故障检测和主动容错控制[J]. 仪器仪表学报, 2022, 43(4):26-37. |
| YU Ming, LI Wanglin, LAN Dun. Sensor fault detection and active fault tolerant control of nonlinear electromechanical systems based on optimized adaptive threshold[J]. Journal of Instrumentation, 2022, 43(4): 26-37. | |
| [15] | 何忠伟. 区间观测器及其控制系统研究[D]. 广州: 华南理工大学, 2016:15. |
| HE Zhongwei. Research on interval observer and its control system[D]. Guangzhou: South China University of Technology, 2016:15. | |
| [16] | 付光杰, 潘海龙. 基于神经网络观测器的 PMSM无传感器矢量控制[J]. 国外电子测量技术, 2018, 37(5): 98-101. |
| FU Guangjie, PAN Hailong. Sensorless vector control of PMSM Based on neural network observer[J]. Foreign Electronic Measurement Technology, 2018, 37(5): 98-101. | |
| [17] | 武晨, 谷松原, 房圣超. HBF神经网络的一种结构自适应在线学习算法[J]. 中国电子科学研究院学报, 2021, 16(5):486-495. |
| WU Chen, GU Songyuan, FANG Shengchao. A structure adaptive online learning algorithm for HBF neural network[J]. Journal of China Academy of Electronic Sciences, 2021, 16 (5): 486-495. | |
| [18] | 周锋, 郑丽霞, 沈烨超, 等. 基于自适应反演的超细金刚线张力控制系统[J]. 中国机械工程, 2021, 32(24): 2995-3000. |
| ZHOU Feng, ZHENG Lixia, SHEN Yechao, et al. Tension control system of superfine diamond wire based on adaptive inversion[J]. China Mechanical Engineering, 2021, 32 (24): 2995-3000. |
| [1] | 蒋静, 彭来湖, 史伟民, 袁豪伟. 基于奇异值分解算法的非接触纱线张力测量[J]. 纺织学报, 2024, 45(09): 204-211. |
| [2] | 彭来湖, 侯良美, 齐育宝, 汝欣, 刘建廷. 基于自适应Loess的纱线张力信号处理方法[J]. 纺织学报, 2024, 45(02): 246-254. |
| [3] | 孙磊, 屠佳佳, 毛慧敏, 王俊茹, 史伟民. 针织智能车间自动换筒任务调度技术[J]. 纺织学报, 2023, 44(12): 189-196. |
| [4] | 彭来湖, 刘建廷, 李杨, 齐育宝, 李建强, 茅木泉. 基于卷积滤波的接触式纱线张力测量方法[J]. 纺织学报, 2023, 44(08): 73-80. |
| [5] | 李杨, 彭来湖, 刘建廷, 胡旭东, 郑秋扬. 基于横向振动频率的轴向运动纱线张力测量[J]. 纺织学报, 2023, 44(06): 72-77. |
| [6] | 纪越, 潘东, 马杰东, 宋丽梅, 董九志. 基于机器视觉的弦振动纱线张力非接触检测系统[J]. 纺织学报, 2023, 44(05): 198-204. |
| [7] | 应志平, 王伟青, 吴震宇, 胡旭东. 三维正交机织复合材料的冲后压缩性能[J]. 纺织学报, 2023, 44(01): 129-135. |
| [8] | 彭来湖, 章钰娟, 吕永法, 戴宁, 李建强. 纬编针织纱线输送状态检测方法及其动态特性[J]. 纺织学报, 2022, 43(12): 167-172. |
| [9] | 郭敏, 高卫东, 朱博, 刘建立, 郭明瑞. 模拟织造状态下的浆纱耐磨性能测试方法[J]. 纺织学报, 2021, 42(11): 46-50. |
| [10] | 孙帅, 缪旭红, 张琦, 王瑾. 高速经编机上纱线张力的波动规律[J]. 纺织学报, 2020, 41(03): 51-55. |
| [11] | 徐云龙, 夏风林. 双针床经编机梳栉摆动对瞬时需纱量和纱线张力的影响[J]. 纺织学报, 2019, 40(06): 106-110. |
| [12] | 孙帅 缪旭红 张灵婕 胡瑜. 经编纱线张力补偿装置的工作机制[J]. 纺织学报, 2018, 39(11): 140-144. |
| [13] | 胡瑜 刘行 缪旭红. 经编纱线动态张力评价指标[J]. 纺织学报, 2018, 39(02): 68-72. |
| [14] | 扈昕瞳 张玉井 孟婥 孙以泽. 编织锭子放线速度对纱线张力调控的建模与影响[J]. 纺织学报, 2017, 38(06): 111-117. |
| [15] | 夏胜华 孙以泽 孟婥 任国斌 . 簇绒地毯织机提花装置的绕纱动态张力分析[J]. 纺织学报, 2015, 36(07): 136-141. |
|
||
 京公网安备11010502044800号
京公网安备11010502044800号