纺织学报 ›› 2020, Vol. 41 ›› Issue (07): 78-87.doi: 10.13475/j.fzxb.20190800210
李珣1( ), 南恺恺1, 赵征凡2, 王晓华1, 景军锋1
), 南恺恺1, 赵征凡2, 王晓华1, 景军锋1
LI Xun1(), NAN Kaikai1, ZHAO Zhengfan2, WANG Xiaohua1, JING Junfeng1
摘要:
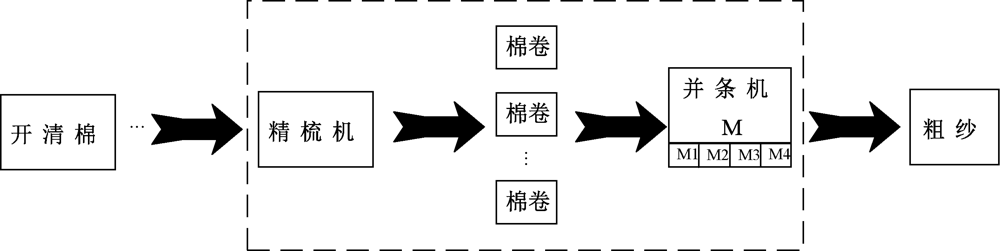
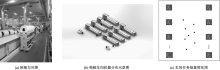
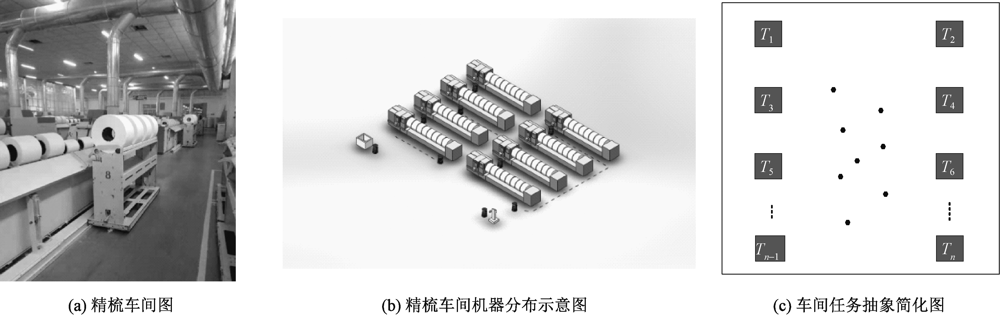
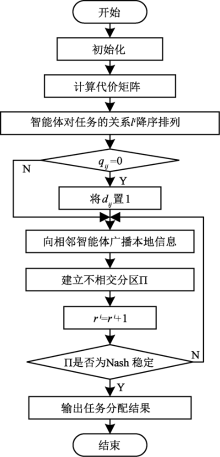
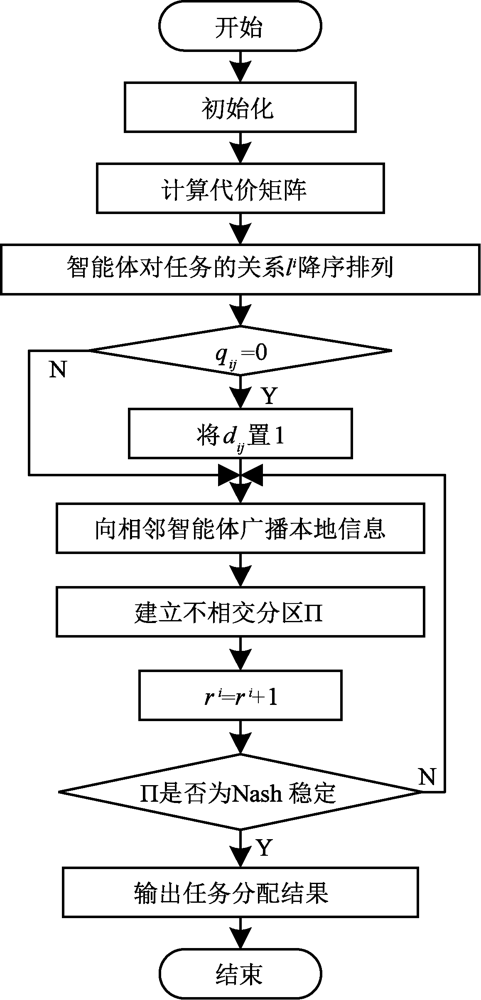
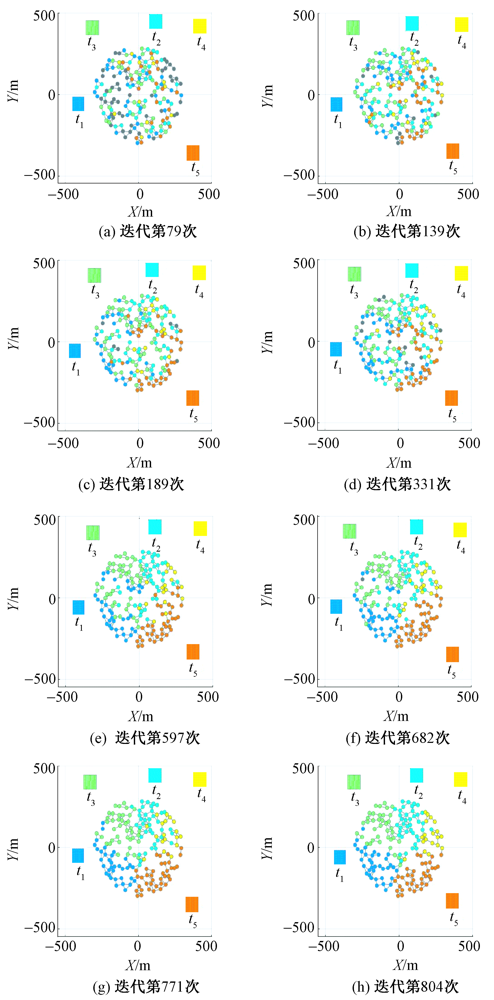
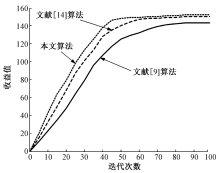
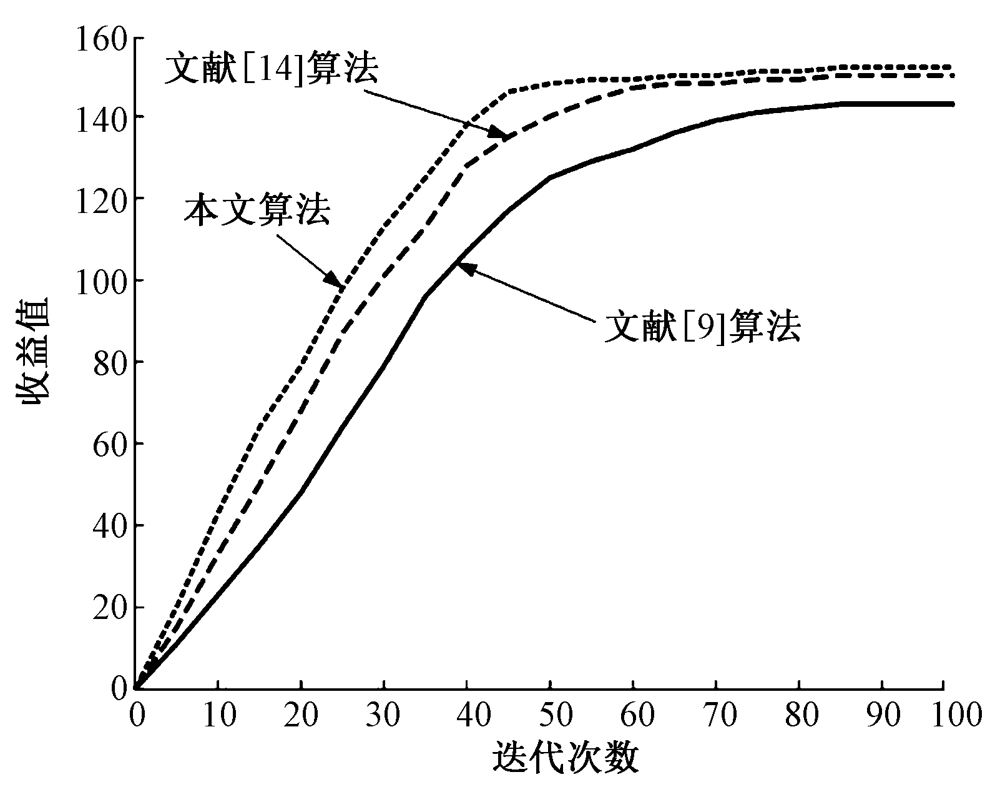
针对当前纺织品智能化生产加工过程中搬运机器人所面临的大规模复杂动态任务分配问题,提出了一种基于智能体博弈理论的分布式自主决策框架。根据纺织品实际生产过程任务环境建立任务模型,在考虑到任务的距离和时间优先级等因素下建立目标函数,以智能体的目标效用函数最优为策略选择依据,引入博弈论中的Nash均衡理论对问题求解,并对该决策框架进行了实验验证。实验结果表明:在该决策框架下任务的分配相比同类分布式任务分配算法能够得到全局最优解,具有较强的可扩展性、良好的鲁棒性、收敛性能,同时对动态任务分配同样具有良好结果表现。
中图分类号:
| [1] | 曹鹏飞, 郝矿荣, 丁永生. 面向多机器人动态任务分配的事件驱动免疫网络算法[J]. 智能系统学报, 2018,13(6):952-958. |
| CAO Pengfei, HAO Kuangrong, DING Yongsheng. Event-driven immune network algorithm for multi-robot dynamic task allocation[J]. CAAI Transactions on Intelligent Systems, 2018,13(6):952-958. | |
| [2] | 李珣, 李林鹏, 南恺恺, 等. 智能家居移动机器人的人脸识别方法[J]. 西安工程大学学报, 2020,34(1):61-66. |
| LI Xun, LI Linpeng, NAN Kaikai, et al. Face recognition method of smart home mobile robot[J]. Journal of Xi'an Polytechnic University, 2020,34(1):61-66. | |
| [3] | 梁星星, 马扬, 冯旸赫, 等. 面向多旅行商问题的多目标模拟退火算法研究[J]. 南京师大学报(自然科学版), 2017,40(3):80-86. |
| LIANG Xingxing, MA Yang, FENG Yanghe, et al. Research on multi-objective simulated annealing algorithm for multi-traveling salesman problem[J]. Journal of Nanjing Normal University (Natural Science Edition), 2017,40(3):80-86. | |
| [4] | 万路军, 姚佩阳, 税冬东, 等. 多编组任务分配动态优化模型及IVFSA算法求解[J]. 电光与控制, 2014,21(5):43-49,57. |
| WAN Lujun, YAO Peiyang, SHUI Dongdong, et al. Dynamic task allocation methods in multiple groups using IVFSA[J]. Electronics Optics & Control, 2014,21(5):43-49,57. | |
| [5] | TANG F, PARKER L E. A complete methodology for generating multi-robot task solutions using asymtred and market-based task allocation[C] // International Conference on Robotics & Automation. Roma: IEEE, 2007: 108-113. |
| [6] | LEE D H, ZAHEER S A, HAN J H, et al. Competency adjustment and workload balancing framework in multi-robot task allocation[J]. International Journal of Advanced Robotic Systems, 2018,15(6):17-23. |
| [7] | LUO L, CHAKRABORTY N, SYCARA K. Provably-good distributed algorithm for constrained multi-robot task assignment for grouped tasks[J]. IEEE Transactions on Robotics, 2015,31(1):19-30. |
| [8] | 段俊花, 朱怡安, 黄姝娟, 等. 多模态融合的多机器人任务分配算法研究[J]. 西北工业大学学报, 2013,31(6):974-978. |
| DUAN Junhua, ZHU Yian, HUANG Shujuan, et al. Multi-robot task allocation algorithm based on multi-modality synjournal[J]. Journal of Northwestern Polytechnical University, 2013,31(6):974-978. | |
| [9] | 齐心跃, 田彦涛, 杨茂, 等. 基于市场机制的多机器人救火任务分配策略[J]. 吉林大学学报(信息科学版), 2009,27(5):506-513. |
| QI Xinyue, TIAN Yantao, YANG Mao, et al. Market based multi-robot task allocation for fire disaster response[J]. Journal of Jilin University (Information Science Edition), 2009,27(5):506-513. | |
| [10] | 王皓, 曹健. 分布式环境下面向复杂任务的Agent联盟构建[J]. 计算机工程, 2013,39(12):216-222. |
| WANG Hao, CAO Jian. Agent coalition formation for complex task under distributed environment[J]. Computer Engineering, 2013,39(12):216-222. | |
| [11] | 秦新立, 宗群, 李晓瑜, 等. 基于改进蚁群算法的多机器人任务分配[J]. 空间控制技术与应用, 2018,44(5):55-59. |
| QIN Xinli, ZONG Qun, LI Xiaoyu, et al. Task allocation of multi-robot based on improved ant colony algorithm[J]. Aerospace Control and Application, 2018,44(5):55-59. | |
| [12] | 刘淑华, 张嵛, 吴洪岩, 等. 基于群体智能的多机器人任务分配[J]. 吉林大学学报(工学版), 2010,40(1):123-129. |
| LIU Shuhua, ZHANG Yu, WU Hongyan, et al. Multi-robot task allocation based on swarm intelligence[J]. Journal of Jilin University (Engineering and Technology Edition), 2010,40(1):123-129. | |
| [13] |
FANG B F, GUO X P, WANG Z J, et al. Collaborative task assignment of interconnected, affective robots towards autonomous healthcare assistant[J]. Future Generation Computer Systems, 2019,92:241-251.
doi: 10.1016/j.future.2018.09.069 |
| [14] | 刘小梅, 田彦涛, 杨茂. 基于博弈论的多机器人任务分配算法[J]. 吉林大学学报(信息科学版), 2010,28(3):256-263. |
| LIU Xiaomei, TIAN Yantao, YANG Mao. Game theory based multi-robot task allocation algorithm[J]. Journal of Jilin University (Information Science Edition), 2010,28(3):256-263. | |
| [15] | GERKEY B P. On multi-robot task allocation[J]. British Journal of Health Psychology, 2003,13(4):659-681. |
| [16] | 罗云峰. 博弈论教程[M]. 北京: 清华大学出版社,北京交通大学出版社, 2007: 43-56. |
| LUO Yunfeng. Course of game theory [M]. Beijing: Tsinghua University Press, Beijing Jiaotong University Press, 2007: 43-56. | |
| [17] | 黎萍, 杨宜民. 基于博弈论的多机器人系统任务分配算法[J]. 计算机应用研究, 2013,30(2):392-395. |
| LI Ping, YANG Yimin. Game theory based task allocation algorithm for multi-robot systems[J]. Application Research of Computers, 2013,30(2):392-395. |
| [1] | 林祖伟;方建斌;宋执环. 基于Multi-Agent的服饰企业分销与物流配送管理系统[J]. 纺织学报, 2007, 28(4): 121-124. |
|
||
 京公网安备11010502044800号
京公网安备11010502044800号