纺织学报 ›› 2020, Vol. 41 ›› Issue (10): 164-169.doi: 10.13475/j.fzxb.20191104106
沈瑞超, 郗欣甫, 孙以泽( )
)
SHEN Ruichao, CHI Xinfu, SUN Yize()
摘要:
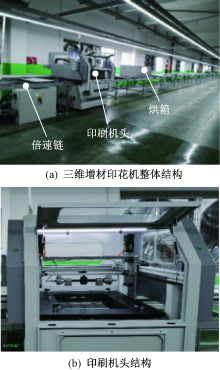
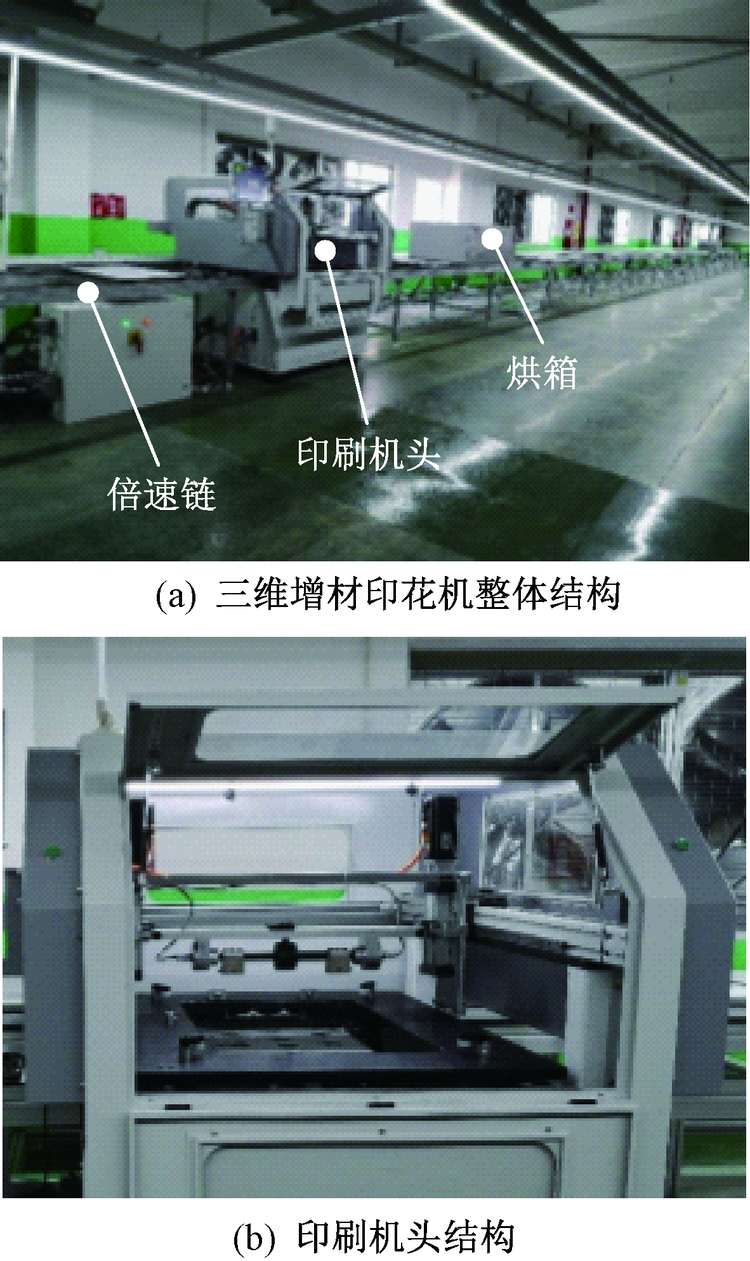
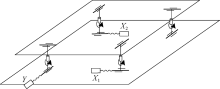
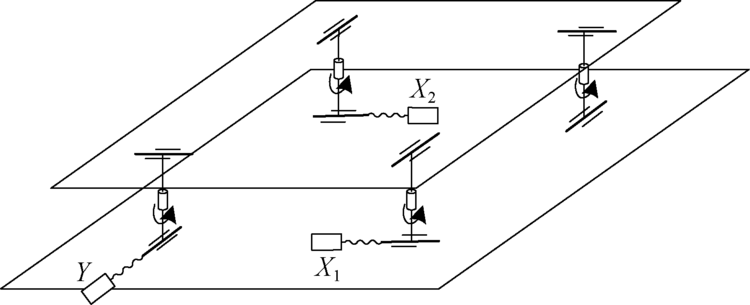
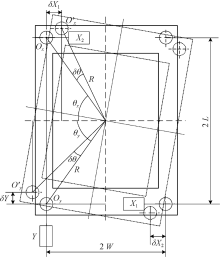
针对自动鞋面印花机在进行对版时定位精度低,影响鞋面印刷质量的问题,提出了基于冗余驱动的印花机对位平台。在原有的三轴并联机构对位平台的基础上通过增加1个Y轴,有效地提高了对位平台Y向的刚度和承载能力,从而提高了印花机对位平台的定位精度。由于冗余驱动机构运动过程中存在机构运动耦合,利用几何法进行解耦,提出了基于电子凸轮的控制策略。同时提出了对机构换向间隙补偿的控制策略,进一步提高对位平台的定位精度,保证了鞋面的印刷质量。经过实验验证,改进后的印花机对位平台Y向定位精度提高了85.7%,Z向旋转定位精度提高了72.9%,X向和Y向换向间隙分别提高了50% 和75%,Z向旋转换向间隙提高了42.86%。
中图分类号:
| [1] | 高巧侠. 浅析丝网印刷质量的影响因素[J]. 广东印刷, 2017(3):39-40. |
| GAO Qiaoxia. Analysis of the factors affecting the quality of screen printing[J]. Guangdong Printing, 2017(3):39-40. | |
| [2] | 汪兴兴, 卓露, 朱昱, 等. R680系列自动印花机椭圆运动机构建模与仿真解析[J]. 纺织学报, 2017,38(3):143-148. |
| WANG Xingxing, ZHUO Lu, ZHU Yu, et al. Modeling and simulation of elliptical motion mechanism for R680 series automatic printing machine[J]. Journal of Textile Research, 2017,38(3):143-148. | |
| [3] | 王晓晖, 刘月刚, 孟婥, 等. 基于遗传算法和神经网络的3D增材印花工艺参数优化[J]. 纺织学报, 2019,40(11):168-174. |
| WANG Xiaohui, LIU Yuegang, MENG Chuo, et al. Optimization of process parameters for 3D additive screen printing based on genetic algorithm and neural network[J]. Journal of Textile Research, 2019,40(11):168-174. | |
| [4] | 李培, 李培波, 谢瑶, 等. 基于粒子群算法的3D印花网版对位的移动平台误差补偿[J]. 东华大学学报(自然科学版), 2018,44(2):282-288,308. |
| LI Pei, LI Peibo, XIE Yao, et al. Error compensation of mobile platform for 3D printing plate alignment based on particle swarm optimization[J]. Journal of Northeastern University (Natural Science), 2018,44(2):282-288,308. | |
| [5] | 但丁. 织物丝网印花设备及其关键技术研究[D]. 武汉:武汉纺织大学, 2014: 19-30. |
| DAN Ding. The study of automatic screen printing machine[D]. Wuhan: Wuhan Textile University, 2014: 19-30. | |
| [6] | 刘重阳. 基于双目视觉的UVW定位平台关键技术研究[D]. 北京:北方工业大学, 2017: 7-13. |
| LIU Chongyang. The research on key technologies of UVW positioning platform based on binocular vision[D]. Beijing: North China University of Technology, 2017: 7-13. | |
| [7] |
YAO Jiantao, GU Weidong, FENG Zongqiang, et al. Dynamic analysis and driving force optimization of a 5-DOF parallel manipulator with redundant actuation[J]. Robotics and Computer Integrated Manufacturing, 2017,48:51-58.
doi: 10.1016/j.rcim.2017.02.006 |
| [8] | CHENG H, LIU G F, YIU Y K, et al. Advantages and dynamics of parallel manipulators with redundant actuation[C]// Proceedings of 2001 IEEE/RSJ International Conference on Intelligent Robots and Systems. Maui: IEEE, 2001: 171-176. |
| [9] |
FIRMANI F, PODHORODESKI R P. Force-unconstrained poses for a redundantly-actuated planar parallel manipulator[J]. Mechanism and Machine Theory, 2004,39(5):459-476.
doi: 10.1016/j.mechmachtheory.2003.11.002 |
| [10] | LIU G F, YIU Y K, LI Z X. Inertia equivalence principle and adaptive control of parallel manipulators with redundant actuation[C]// Proceedings of the 2002 American Control Conference. Anchorage: IEEE, 2002: 3196-3201. |
| [11] | 刘晓飞, 姚建涛, 赵永生. 冗余驱动并联机构的驱动力同步协调控制[J]. 计算机集成制造系统, 2018,24(9):2140-2149. |
| LIU Xiaofei, YAO Jiantao, ZHAO Yongsheng. Driving force synchronous control of redundantly actuated parallel manipulator[J]. Computer Integrated Manufacturing Systems, 2018,24(9):2140-2149. | |
| [12] |
SHANG Weiwei, CONG Shuang. Robust nonlinear control of a planar 2-DOF parallel manipulator with redundant actuation[J]. Robotics and Computer Integrated Manufacturing, 2014,30(6):597-604.
doi: 10.1016/j.rcim.2014.04.004 |
| [13] |
王启明, 苏建, 隋振, 等. 一种新型冗余驱动并联机构位姿正解研究[J]. 机械工程学报, 2019(9):40-47.
pmid: 11539815 |
|
WANG Qiming, SU Jian, SUI Zhen, et al. Research on forward kinematics of a new type of redundant actuation parallel mechanism[J]. Journal of Mechanical Engineering, 2019 (9):40-47.
pmid: 11539815 |
|
| [14] | 许展望, 景群平, 王俊萍, 等. 高精度机械设备换向间隙补偿的控制系统和方法[J]. 重型机械, 2018(2):13-16. |
| XU Zhanwang, JING Qunping, WANG Junping, et al. Control system and method of reversing backlash compensation for high precision mechanical equip-ment[J]. Heavy Machinery, 2018(2):13-16. |
| [1] | 田全慧, 顾萍, 朱明. 波段分区的数码喷墨印花机光谱特性化模型[J]. 纺织学报, 2019, 40(04): 140-144. |
| [2] | 牛善宇 曹清林. 采用电子凸轮的多梳栉经编机成圈运动[J]. 纺织学报, 2017, 38(04): 127-133. |
| [3] | 汪兴兴 卓露 朱昱 倪威 倪红军. R680系列自动印花机椭圆运动机构建模与仿真解析[J]. 纺织学报, 2017, 38(03): 143-148. |
| [4] | 陈怀忠. 平网印花单元网络化及其电气控制系统设计[J]. 纺织学报, 2014, 35(2): 78-0. |
| [5] | 曹静 徐伯俊 谢春萍 刘新金 苏旭中. 细纱机电子凸轮的设计[J]. 纺织学报, 2013, 34(12): 117-0. |
| [6] | 郑宝平 蒋高明 夏风林 张琦. 基于转矩控制模式的经编电子横移系统设计[J]. 纺织学报, 2012, 33(10): 122-127. |
|
||
 京公网安备11010502044800号
京公网安备11010502044800号