纺织学报 ›› 2021, Vol. 42 ›› Issue (01): 145-153.doi: 10.13475/j.fzxb.20200401309
李博1,2, 胡凯1,2, 金国光1,2( ), 魏展1,2, 畅博彦1,2
), 魏展1,2, 畅博彦1,2
LI Bo1,2, HU Kai1,2, JIN Guoguang1,2(), WEI Zhan1,2, CHANG Boyan1,2
摘要:
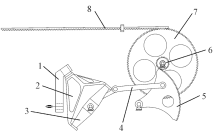
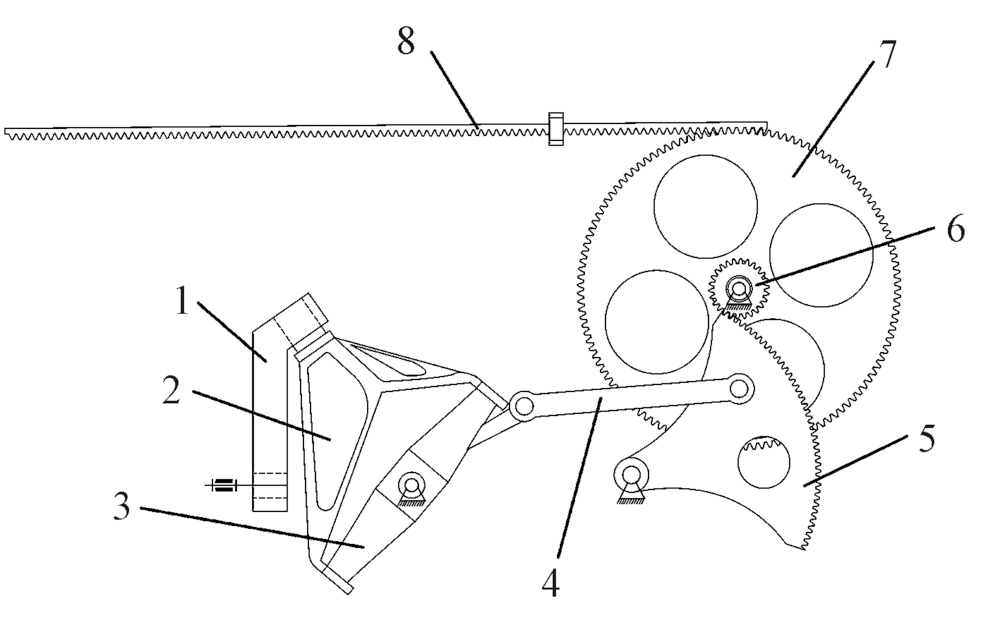
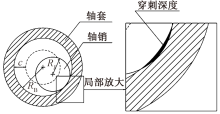
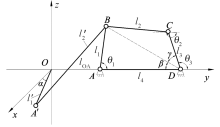
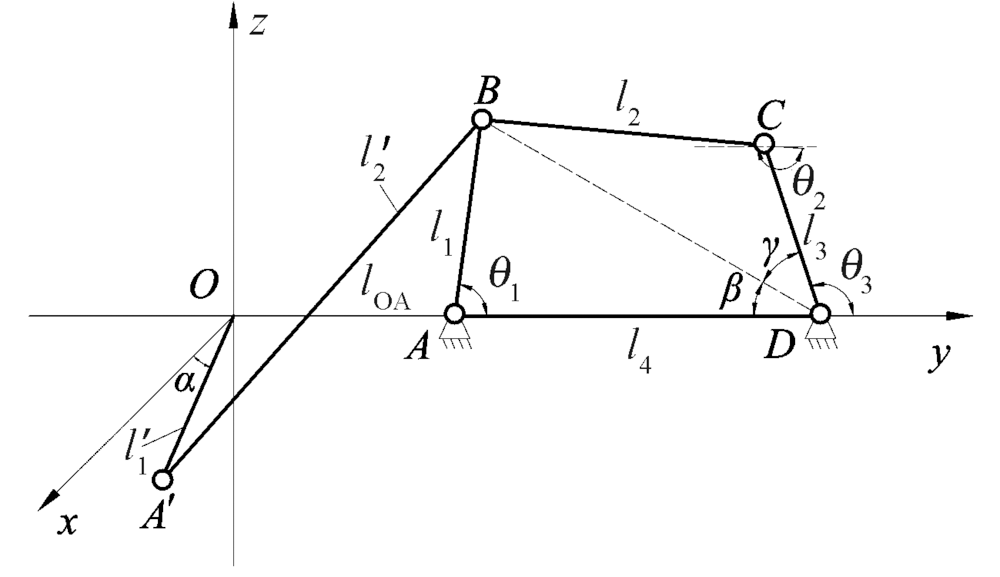
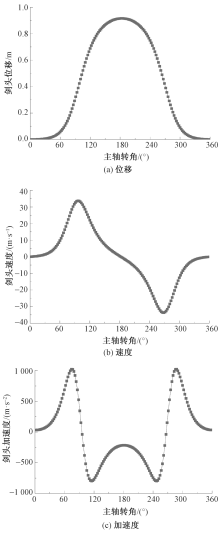
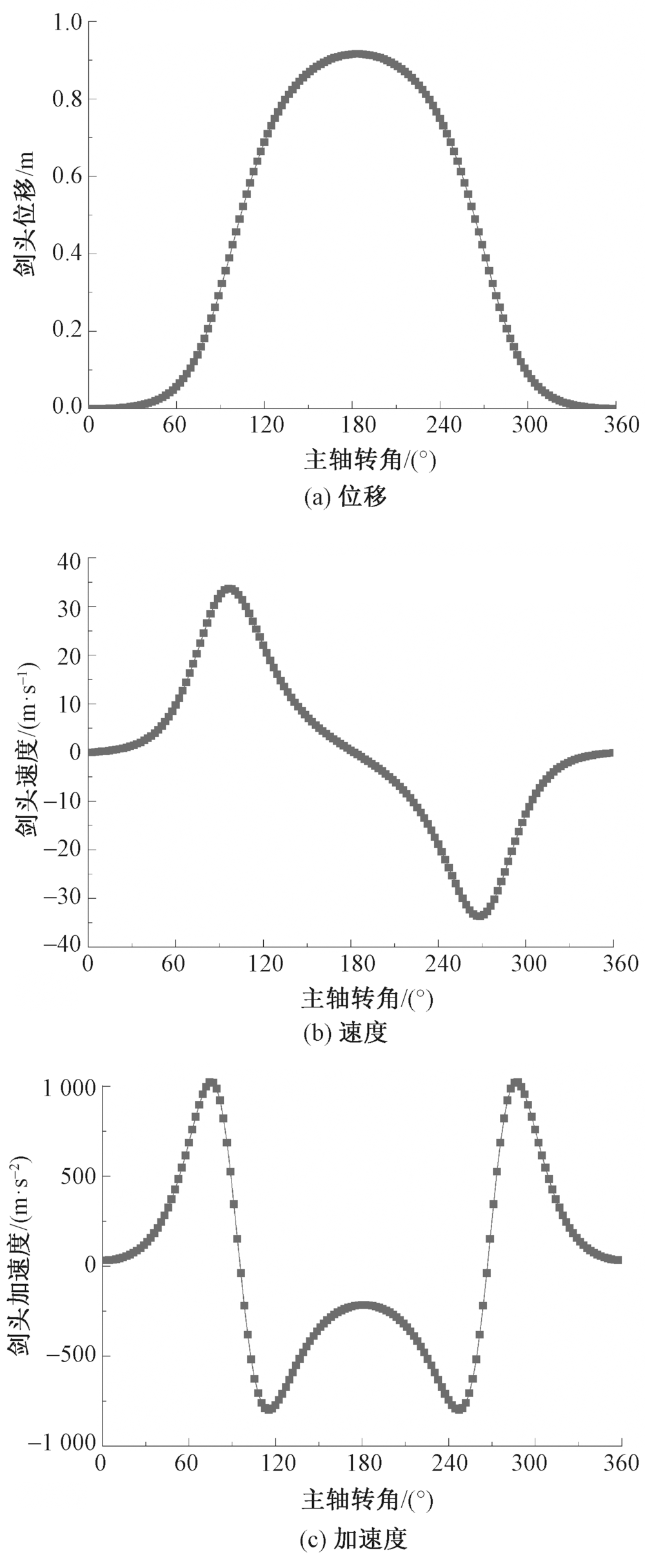
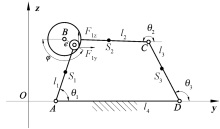
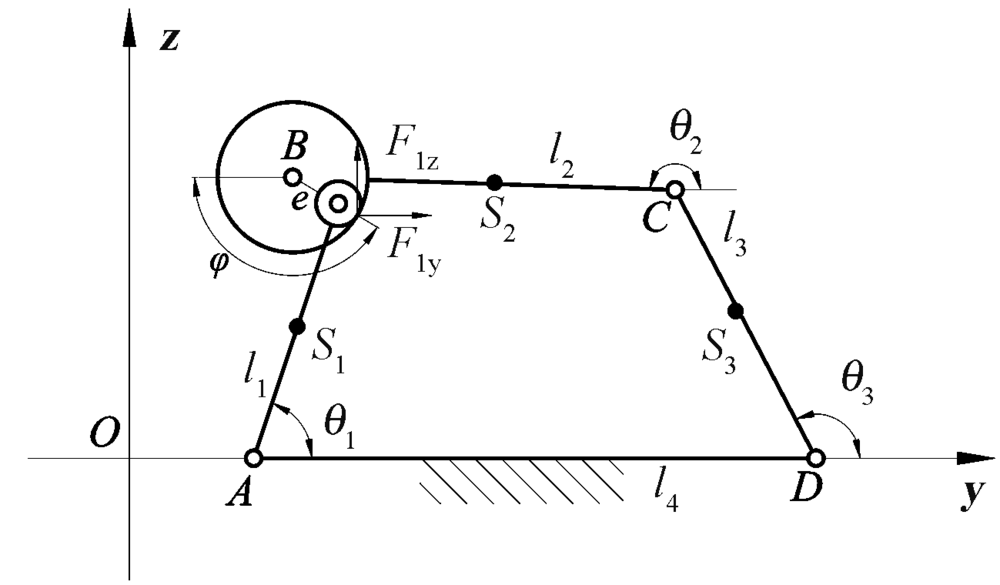
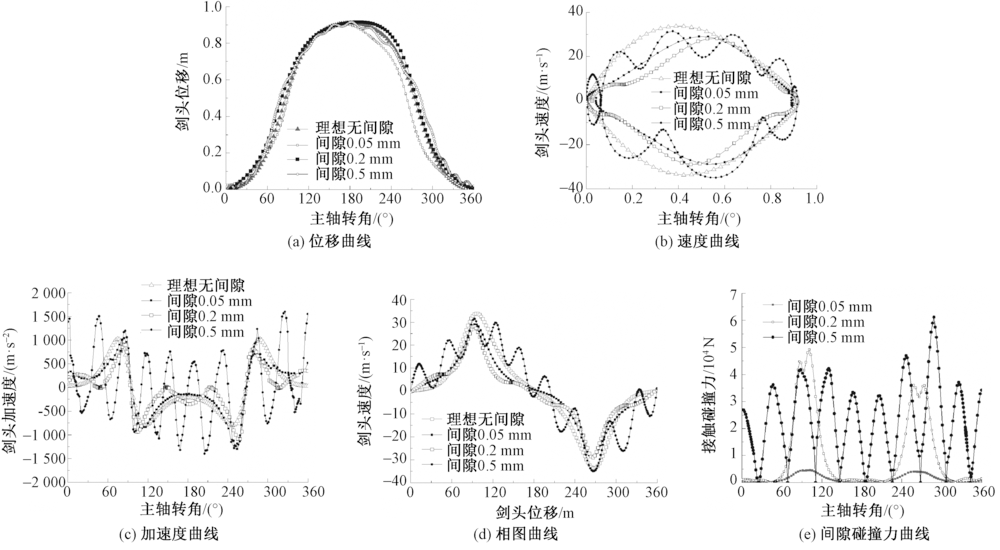
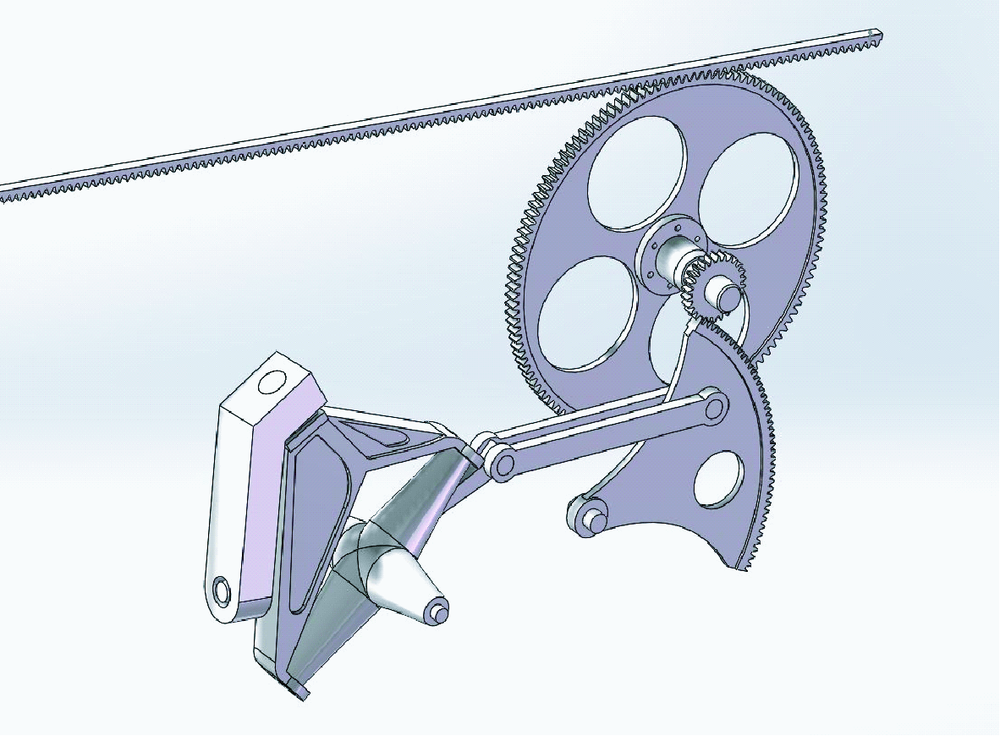
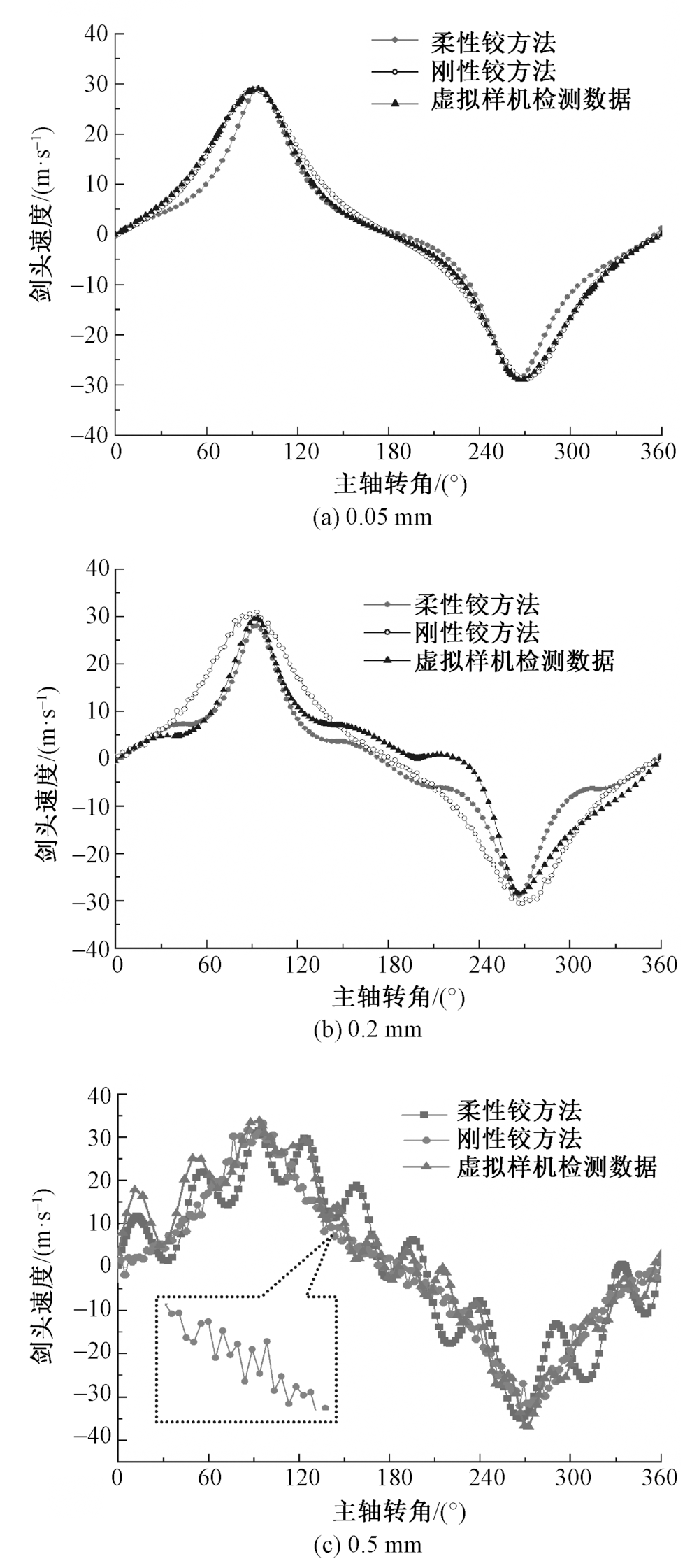
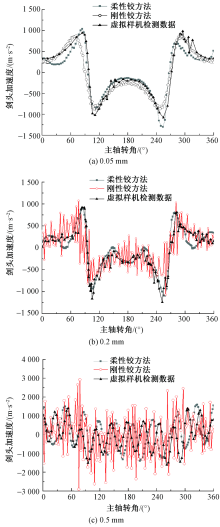
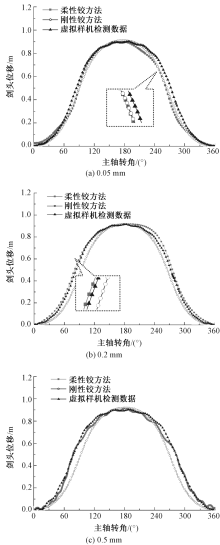
为提升高速剑杆织机的运行效率,深入研究运动副间隙给空间连杆引纬机构运动输出带来的影响。首先,采用矢量法对空间连杆引纬机构进行运动学仿真,选择适合高速剑杆织机工况下的Lankarani-Nikravesh建模方法;其次,将计算得到的运动学参数与柔性铰碰撞力模型相结合,使用Newton-Euler方法对系统运动输出部分进行动力学分析;结合具体工程实例,求解不同间隙下系统的动态特性;最后,通过虚拟样机检测数据校核并与刚性铰间隙碰撞建模方法进行输出对比和误差分析。结果表明:间隙的增加会导致剑头加速度的剧烈波动,进而影响空间连杆引纬机构平稳接纬和剑头准确夹持纬纱;在间隙值为0.5 mm时,采用柔性铰方法能将剑头位移的峰值误差缩小69.4%,有效提升工作精度。
中图分类号:
| [1] | JAN V J, MAXIMILIAN K, WILFRIED R, et al. Magnetic weft insertion for weaving machines[J]. Textile Research Journal, 2018,88(14):1677-1685. |
| [2] | WEI S M, YANG Z, GUO L, et al. A new type of AODF based on an imitation of the weft insertion of a rapier loom[J]. Electronics, 2019,8(2):157-175. |
| [3] | 张雷, 孔佳元, 雷炳杰, 等. 变导程螺旋引纬机构剑杆位移曲线的设计[J]. 纺织学报, 2017,38(4):121-126. |
| ZHANG Lei, KONG Jiayuan, LEI Bingjie, et al. Design of displacement diagram for rapier in variable lead screw weft insertion mechanism[J]. Journal of Textile Research, 2017,38(4):121-126. | |
| [4] | TING K, HSU K, YU Z T, et al. Clearance-induced output position uncertainty of planar linkages with revolute and prismatic joints[J]. Mechanism and Machine Theory, 2017,111:66-75. |
| [5] | QIAN M B, QIN Z, YAN S Z, et al. A comprehensive method for the contact detection of a translational clearance joint and dynamic response after its application in a crank-slider mechanism[J]. Mechanism and Machine Theory, 2020,145:1-18. |
| [6] | LIU Z X, LIU Z S, ZHAO J M, et al. Study on interactions between tooth backlash and journal bearing clearance nonlinearity in spur gear pair system[J]. Mechanism and Machine Theory, 2017,107:229-245. |
| [7] | GENG X Y, WANG X J, WANG L, et al. Non-probabilistic time-dependent kinematic reliability assessment for function generation mechanisms with joint clearances[J]. Mechanism and Machine Theory, 2016,104:202-221. |
| [8] | LI Y Y, WANG C, HUANG W H. Dynamics analysis of planar rigid-flexible coupling deployable solar array system with multiple revolute clearance joints[J]. Mechanical Systems and Signal Processing, 2019,117:188-209. |
| [9] | MA J, QIAN L F, CHEN G S, et al. Dynamic analysis of mechanical systems with planar revolute joints with clearance[J]. Mechanism and Machine Theory, 2015,94:148-164. |
| [10] | MIAO H, LI B, LIU J, et al. Effects of revolute clearance joint on the dynamic behavior of a planar space arm system[J]. Proceedings of the Institution of Mechanical Engineers, 2019,233(5):1629-1644. |
| [11] | SELÇUK E. Determining power consumption using neural model in multibody systems with clearance and flexible joints[J]. Multibody System Dynamics, 2019,47(2):165-181. |
| [12] | CHEN X L, LI Y W. Dynamics analysis of spatial parallel mechanism with irregular spherical joint clearance[J]. Shock and Vibration, 2019,2019:1-21. |
| [13] | LAI X M, HE H, LAI Q F, et al. Computational prediction and experimental validation of revolute joint clearance wear in the low-velocity planar mechanism[J]. Mechanical Systems and Signal Processing, 2017,85:963-976. |
| [14] | TAN H Y, HU Y J, LI L. Effect of friction on the dynamic analysis of slider-crank mechanism with clearance joint[J]. International Journal of Non-Linear Mechanics, 2019,115:20-40. |
| [15] | GENG X Y, LI M, LIU Y F, et al. Non-probabilistic kinematic reliability analysis of planar mechanisms with non-uniform revolute clearance joints[J]. Mechanism and Machine Theory, 2019,140:413-433. |
| [16] | REEP E, MESRUR E, BARIS H. Kinematic design and motion analysis of spatial rapier drive mechanisms used in weaving machines[J]. Textile Research Journal, 2014,84(19):2065-2073. |
| [17] |
EMAD O, SEYED A M, MOSTAFA S. Design and modeling of an electromagnetic launcher for weft insertion system[J]. Textile Research Journal, 2019,89(5):834-844.
doi: 10.1177/0040517518755793 |
| [18] |
阎绍泽, 向吴维凯, 黄铁球. 计及间隙的运动副和机械系统动力学的研究进展[J]. 北京大学学报(自然科学版), 2016,52(4):741-755.
doi: 10.13209/j.0479-8023.2016.094 |
| YAN Shaoze, XIANGWU Weikai, HUANG Tieqiu. Advances in modeling of clearance joints and dynamics of mechanical systems with clearances[J]. Acta Scientiarum Naturalium Universitatis Pekinensis, 2016,52(4):741-755. |
| [1] | 喻陈楠, 贾江鸣, 陈之威, 陈建能, 陈加友, 陆文韬. 新型剑杆织机引纬机构的反求建模与运动学仿真[J]. 纺织学报, 2021, 42(01): 154-161. |
| [2] | 张祝辉, 张典堂, 钱坤, 徐阳, 陆健. 广角机织物的织造工艺及其偏轴拉伸力学性能[J]. 纺织学报, 2020, 41(08): 27-31. |
| [3] | 魏展, 金国光, 李博, 宋艳艳, 路春辉. 剑杆织机打纬凸轮接触碰撞力建模与仿真[J]. 纺织学报, 2020, 41(03): 154-159. |
| [4] | 周香琴, 顾叶琴, 吴震宇. 可简便调幅的剑杆织机引纬机构参数特征[J]. 纺织学报, 2019, 40(09): 173-179. |
| [5] | 徐巧 闫文军 梅顺齐 张智明. 基于电磁发射的超宽门幅自动织机引纬机构设计方法[J]. 纺织学报, 2018, 39(07): 130-136. |
| [6] | 张雷 苏宗帅 季祖鹏 顾萍萍. 共轭凸轮引纬机构的凸轮轮廓线光顺与反求[J]. 纺织学报, 2017, 38(12): 141-149. |
| [7] | 周香琴 杨胜皎 王琴龙 蒋辉 唐存满. 剑杆织机惯性载荷变化规律及提速试验[J]. 纺织学报, 2017, 38(08): 144-149. |
| [8] | 张雷 孔佳元 雷炳杰 李杨. 变导程螺旋引纬机构剑杆位移曲线的设计[J]. 纺织学报, 2017, 38(04): 121-126. |
| [9] | 董红坤 贺辛亥 钟鹏 渠志刚 邢圆圆. 三维机织物织边造型工艺设计[J]. 纺织学报, 2017, 38(04): 50-54. |
| [10] | 张雷 贺虎 孔佳元. 含间隙和尺寸误差空间连杆引纬机构运动精度综合分析[J]. 纺织学报, 2016, 37(06): 124-129. |
| [11] | 于红梅 郁崇文. 采用现代工艺的传统风格夏布开发[J]. 纺织学报, 2016, 37(05): 37-41. |
| [12] | 金国光 秦凯旋 魏展 袁汝旺 周国庆. 剑杆织机柔性从动件共轭凸轮打纬机构动力学分析[J]. 纺织学报, 2016, 37(05): 137-142. |
| [13] | 张雷 余克龙 陈少钟 张吉峰. 基于ANSYS和ADAMS空间四连杆引纬机构的柔性动力学仿真[J]. 纺织学报, 2013, 34(5): 116-120. |
| [14] | 宋亚男, 徐荣华, 王钦若. 剑杆织机经纱张力控制中滤波器设计与分析[J]. 纺织学报, 2012, 33(2): 115-120. |
| [15] | 徐荣华 王钦若 宋亚男. 剑杆织机经纱张力控制中噪声信号估计与滤波[J]. 纺织学报, 2011, 32(8): 128-132. |
|
||
 京公网安备11010502044800号
京公网安备11010502044800号