纺织学报 ›› 2021, Vol. 42 ›› Issue (01): 154-161.doi: 10.13475/j.fzxb.20200403008
喻陈楠1, 贾江鸣1,2, 陈之威1, 陈建能1,2( ), 陈加友3, 陆文韬1
), 陈加友3, 陆文韬1
YU Chennan1, JIA Jiangming1,2, CHEN Zhiwei1, CHEN Jianneng1,2(), CHEN Jiayou3, LU Wentao1
摘要:
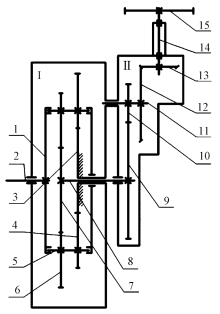
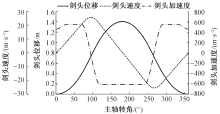
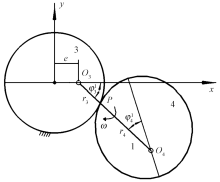
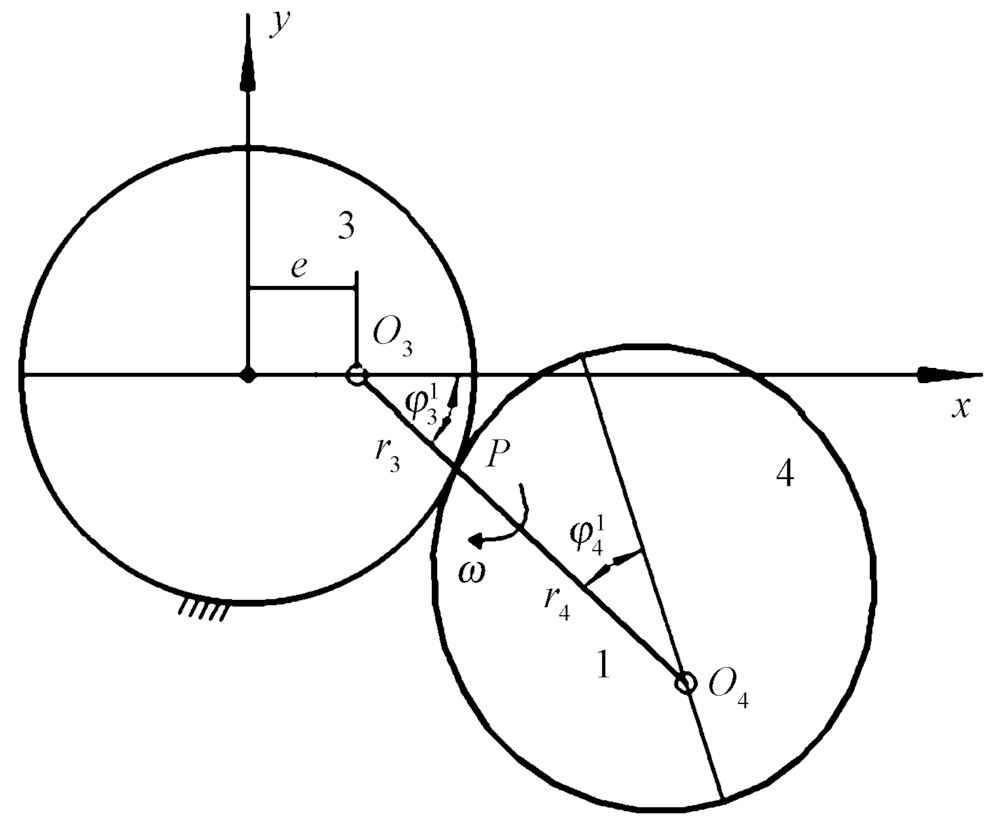
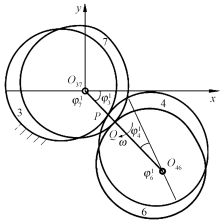
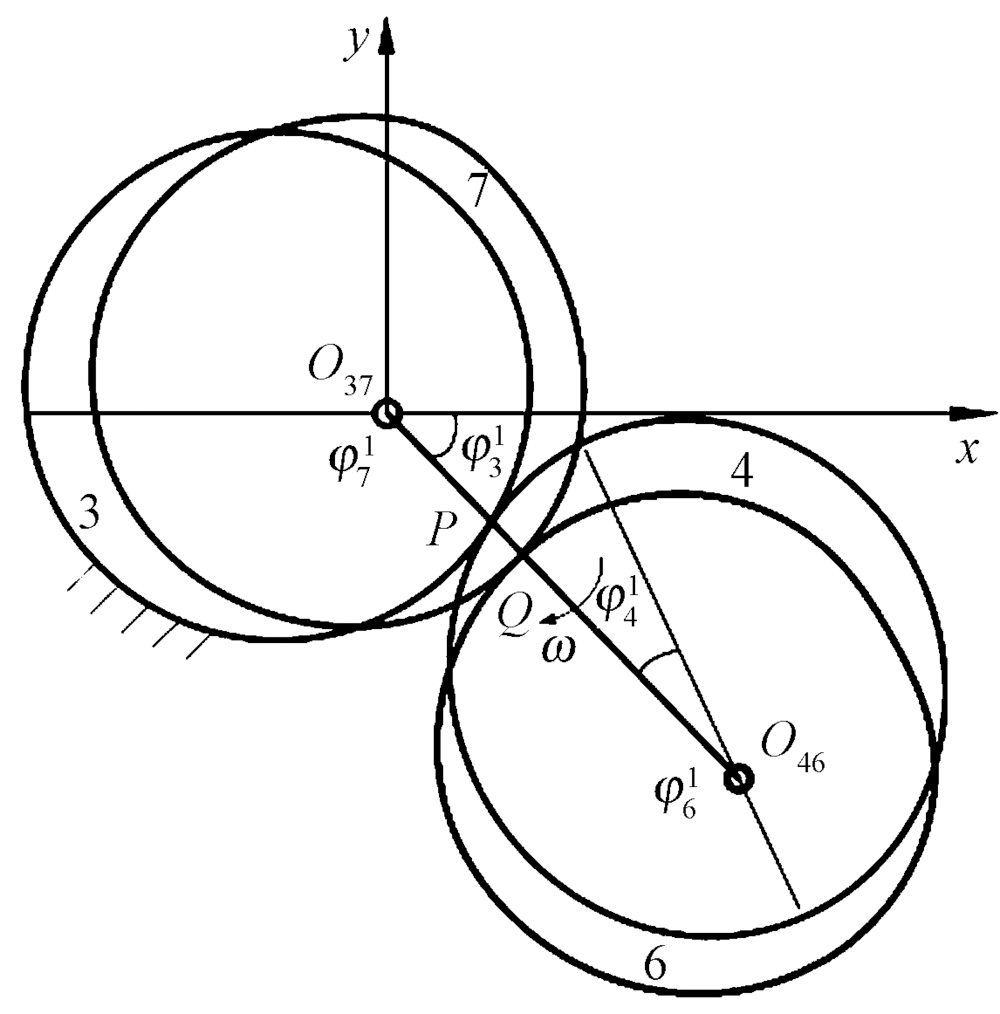
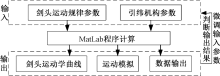
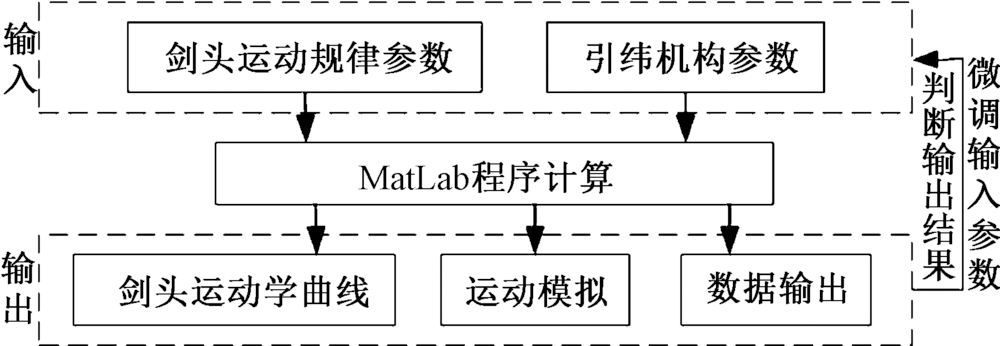
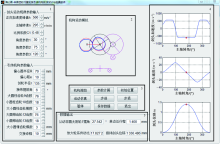
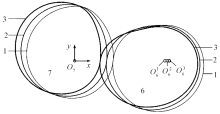
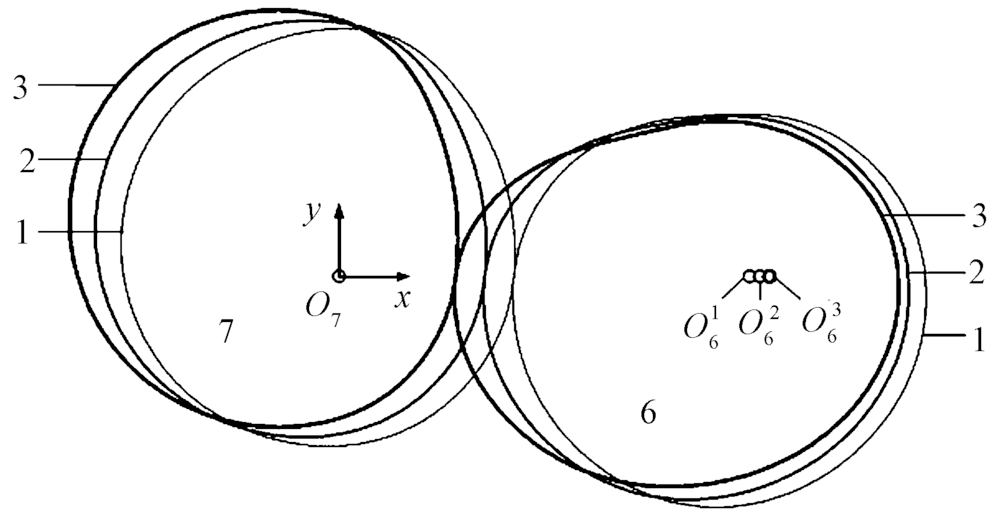
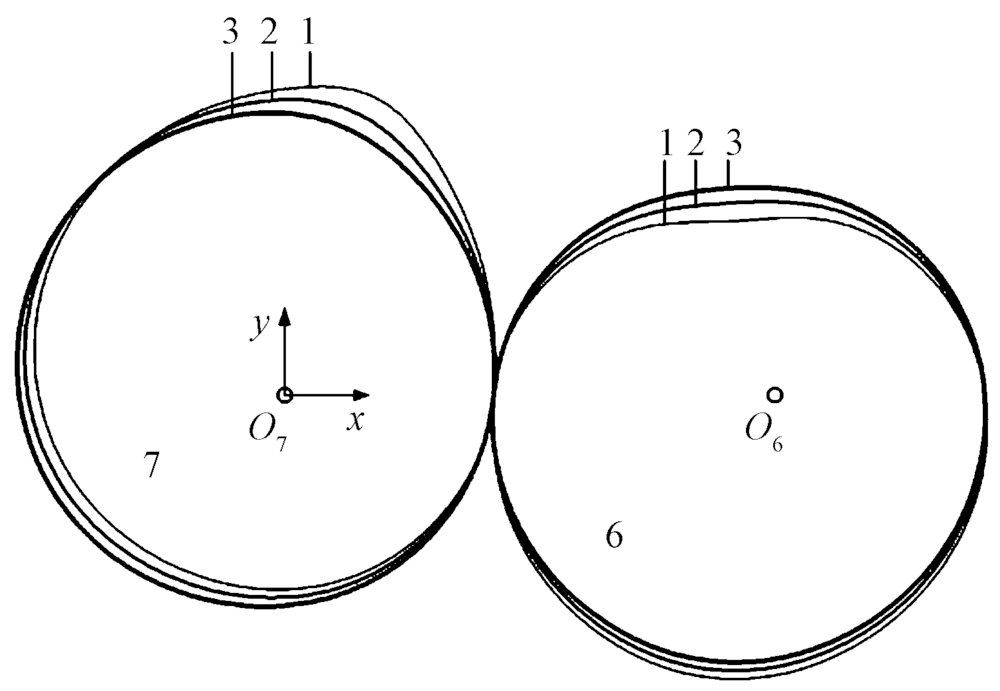
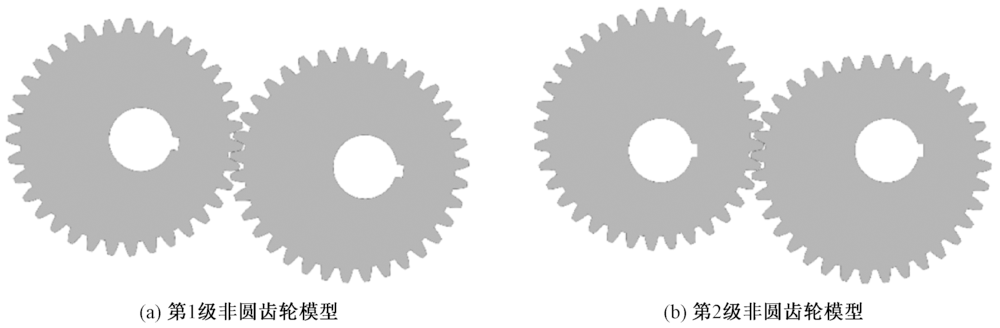
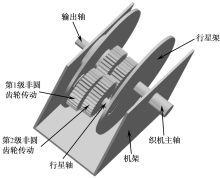
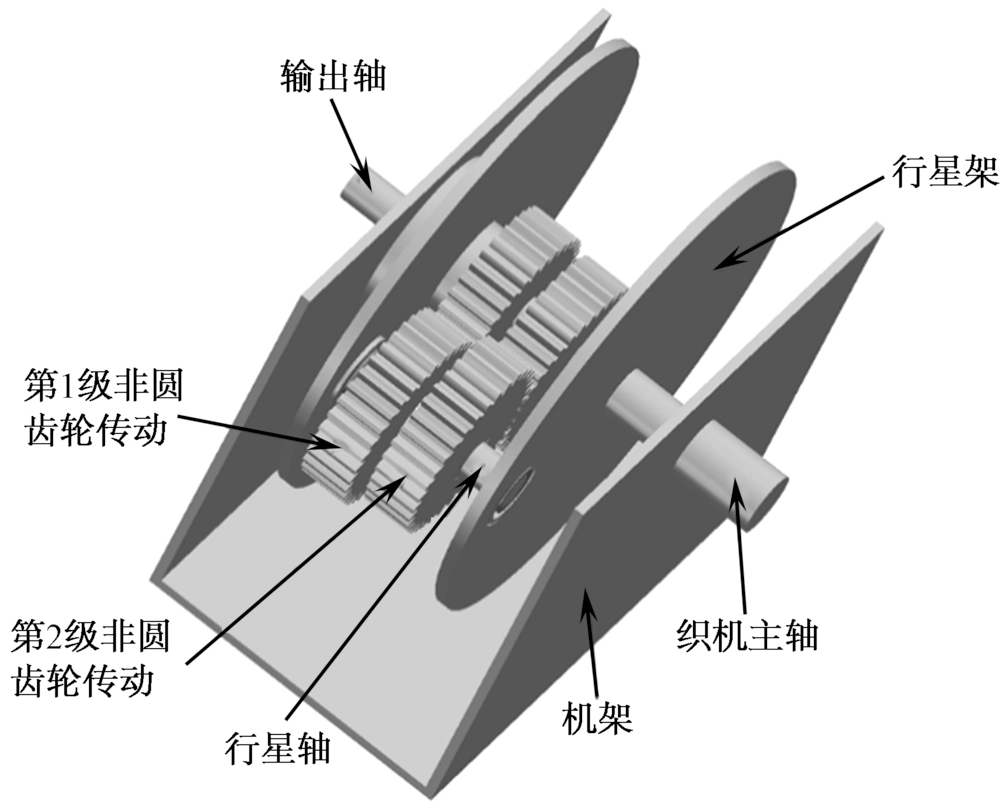
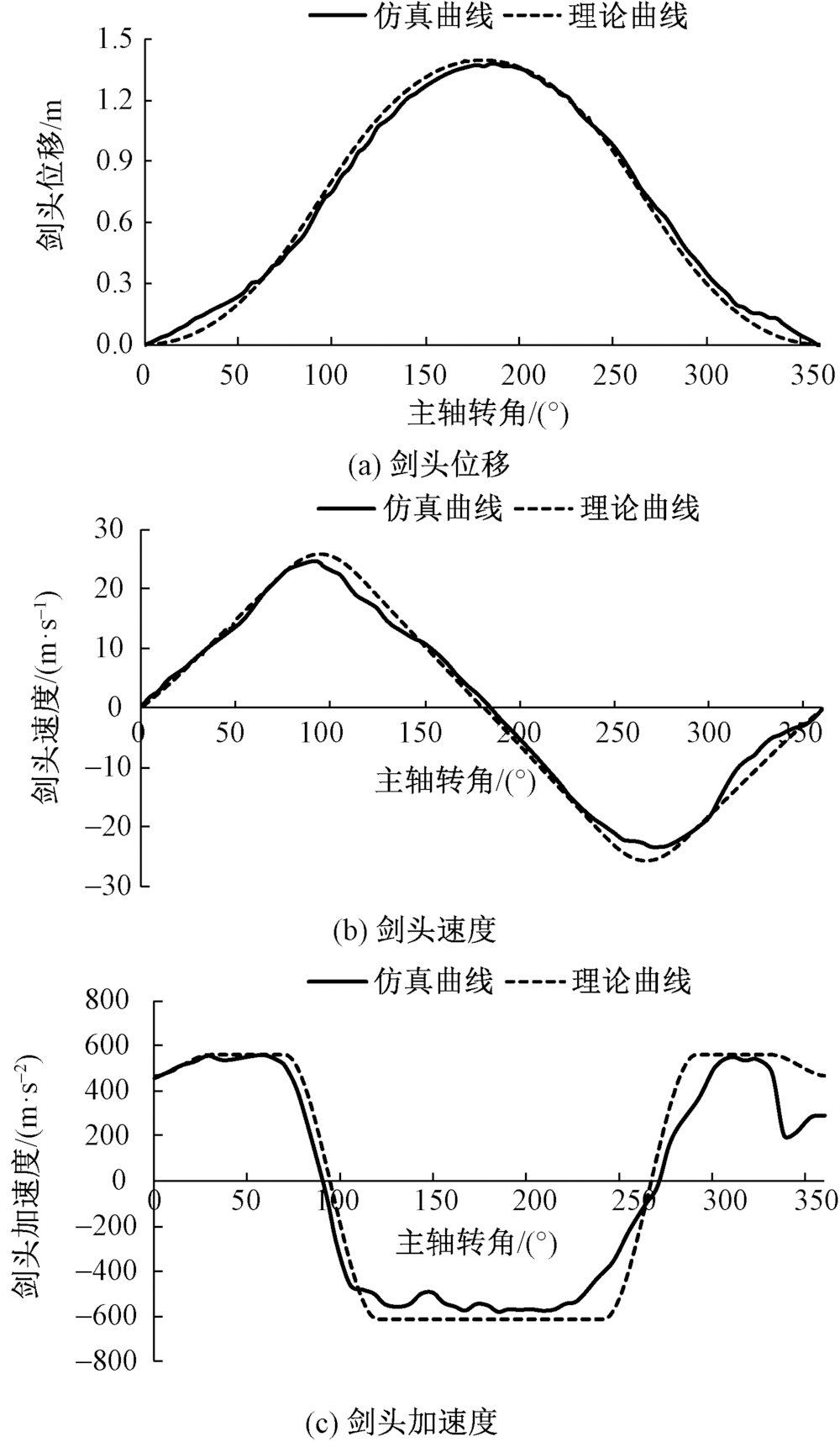
为了提高剑杆织机引纬机构的设计灵活性和运动性能,提出了一种新型偏心圆-非圆齿轮行星轮系引纬机构。根据引纬机构的工作要求,设定了理想的剑杆运动规律,并建立了由理想引纬运动特性反求机构参数的数学模型;基于MatLab编写了该引纬机构的反求设计与仿真软件,并对该引纬机构进行参数优化和运动模拟,得到了一组较优的机构参数;最后建立了该引纬机构的三维模型,并利用机械系统动力学自动分析进行虚拟样机运动学仿真试验。实验结果显示,理论和仿真得到的剑头运动学曲线基本一致,验证了对该新型引纬机构建模和分析的正确性。
中图分类号:
| [1] | 雷利照. 双侧剑杆织机中央交接纬合理性的探讨[J]. 纺织学报, 2010,31(10):124-128. |
| LEI Lizhao. Investigation into rationality of weft handover at center of shed on a rapier loom with two rapiers[J]. Journal of Textile Research, 2010,31(10):124-128. | |
| [2] | 赵雄, 徐宾, 陈建能, 等. 几种典型的剑杆织机引纬机构及其机构创新[J].纺织机械, 2008(2):48-51. |
| ZHAO Xiong, XU Bin, CHEN Jianneng, et al. Several typical weft insertion mechanism of rapier loom and its mechanism innovation[J]. Textile Machinery, 2008(2):48-51. | |
| [3] | 张雷, 苏宗帅, 季祖鹏, 等. 共轭凸轮引纬机构的凸轮轮廓线光顺与反求[J]. 纺织学报, 2017,38(12):141-149. |
| ZHANG Lei, SU Zongshuai, JI Zupeng, et al. Smooth and reverse design of conjugated cams of weft inser-tion[J]. Journal of Textile Research, 2017,38(12):141-149. | |
| [4] | 张小德. 剑杆织机引纬机构共轭凸轮的设计及研究[D]. 杭州:浙江工业大学, 2009: 8-10. |
| ZHANG Xiaode. Design and research of conjugate cam of weft insertion mechanism of rapier loom[D]. Hangzhou: Zhejiang University of Technology, 2009: 8-10. | |
| [5] | 张雷, 孔佳元, 雷炳杰, 等. 变导程螺旋引纬机构剑杆位移曲线的设计[J]. 纺织学报, 2017,38(4):121-126. |
| ZHANG Lei, KONG Jiayuan, LEI Bingjie, et al. Design of displacement diagram for rapier in variable lead screw weft insertion mechanism[J]. Journal of Textile Research, 2017,38(4):121-126. | |
| [6] | 徐永康. 空间四连杆引纬机构优化及动力学仿真[D]. 杭州:浙江理工大学, 2012: 5-8. |
| XU Yongkang. Optimization and dynamic simulation of spatial four-bar linkage weft insertion mechanism [D]. Hangzhou: Zhejiang Sci-Tech University, 2012: 5-8. | |
| [7] | RECEP Eren, MESRUR Erturk, BARIS Hascelik. Kinematic design and motion analysis of spatial rapier drive mechanisms used in weaving machines[J]. Textile Research Journal, 2014,84(19):2065-2073. |
| [8] | 陈建能, 王英, 任根勇, 等. 非圆齿轮行星轮系引纬机构的反求设计与运动学分析[J]. 中国机械工程, 2012,23(20):2405-2409. |
| CHEN Jianneng, WANG Ying, REN Genyong, et al. Reverse design and kinematic analysis of non-circular planetary gear trains weft insertion mechanism[J]. China Mechanical Engineering, 2012,23(20):2405-2409. | |
| [9] | CHEN Jianneng, YU Chennan, TONG Lin, et al. Design and experiment of non-circular combined gear train beating-up mechanism[J]. Journal of Donghua University (English Edition), 2019,36(01):8-14. |
| [10] | 任根勇. 剑杆织机非圆齿轮行星轮系引纬机构的反求设计与仿真分析[D]. 杭州:浙江理工大学, 2012: 12-29. |
| REN Genyong. Reverse design and simulation analysis of the planetary non-circular gears trains weft insertion mechanism applied on rapier loom [D]. Hangzhou: Zhejiang Sci-Tech University, 2012: 12-29. | |
| [11] | 陈元甫, 洪海沧. 剑杆织机原理与使用[M]. 2版.北京: 中国纺织出版社, 2005: 114-117. |
| CHEN Yuanfu, HONG Haicang. Principle and use of rapier loom [M]. 2nd ed. Beijing: China Textile & Apparel Press, 2005: 114-117. | |
| [12] | 陈普生, 何敏英. 动态综合时剑杆运动规律的选择[J]. 东华大学学报, 1987,13(1):35-43. |
| CHEN Pusheng, HE Minying. The selection of rapier motion law in dynamic synjournal[J]. Journal of Donghua University, 1987,13(1):35-43. | |
| [13] | 郭宏亮, 王青, 叶国铭. 修正梯形加速度运动规律中过渡曲线的设计[J]. 纺织学报, 2007,28(8):100-101. |
| GUO Hongliang, WANG Qing, YE Guoming. Design of transitional curve of modified trapezoid acceleration motion[J]. Journal of Textile Research, 2007,28(8):100-101. | |
| [14] | 赵雄, 胡宇龙, 林万焕, 等. 剑杆织机新型引纬运动学曲线的构造及应用[J]. 浙江理工大学学报, 2010,27(4):556-560. |
| ZHAO Xiong, HU Yulong, LIN Wanhuan, et al. Establishment and application of new weft insertion kinematics curves on rapier loom[J]. Journal of Zhejiang Sci-Tech University, 2010,27(4):556-560. | |
| [15] | 吴序堂, 王贵海. 非圆齿轮及非匀速比传动[M]. 北京: 机械工业出版社, 1997: 31-33. |
| WU Xutang, WANG Guihai. Non-circular gear and non-uniform ratio drive [M]. Beijing: China Machine Press, 1997: 31-33. |
| [1] | 李博, 胡凯, 金国光, 魏展, 畅博彦. 空间连杆引纬机构柔性铰间隙动态特性研究[J]. 纺织学报, 2021, 42(01): 145-153. |
| [2] | 张祝辉, 张典堂, 钱坤, 徐阳, 陆健. 广角机织物的织造工艺及其偏轴拉伸力学性能[J]. 纺织学报, 2020, 41(08): 27-31. |
| [3] | 魏展, 金国光, 李博, 宋艳艳, 路春辉. 剑杆织机打纬凸轮接触碰撞力建模与仿真[J]. 纺织学报, 2020, 41(03): 154-159. |
| [4] | 周香琴, 顾叶琴, 吴震宇. 可简便调幅的剑杆织机引纬机构参数特征[J]. 纺织学报, 2019, 40(09): 173-179. |
| [5] | 徐巧 闫文军 梅顺齐 张智明. 基于电磁发射的超宽门幅自动织机引纬机构设计方法[J]. 纺织学报, 2018, 39(07): 130-136. |
| [6] | 张雷 苏宗帅 季祖鹏 顾萍萍. 共轭凸轮引纬机构的凸轮轮廓线光顺与反求[J]. 纺织学报, 2017, 38(12): 141-149. |
| [7] | 周香琴 杨胜皎 王琴龙 蒋辉 唐存满. 剑杆织机惯性载荷变化规律及提速试验[J]. 纺织学报, 2017, 38(08): 144-149. |
| [8] | 张雷 孔佳元 雷炳杰 李杨. 变导程螺旋引纬机构剑杆位移曲线的设计[J]. 纺织学报, 2017, 38(04): 121-126. |
| [9] | 董红坤 贺辛亥 钟鹏 渠志刚 邢圆圆. 三维机织物织边造型工艺设计[J]. 纺织学报, 2017, 38(04): 50-54. |
| [10] | 张雷 贺虎 孔佳元. 含间隙和尺寸误差空间连杆引纬机构运动精度综合分析[J]. 纺织学报, 2016, 37(06): 124-129. |
| [11] | 于红梅 郁崇文. 采用现代工艺的传统风格夏布开发[J]. 纺织学报, 2016, 37(05): 37-41. |
| [12] | 金国光 秦凯旋 魏展 袁汝旺 周国庆. 剑杆织机柔性从动件共轭凸轮打纬机构动力学分析[J]. 纺织学报, 2016, 37(05): 137-142. |
| [13] | 张雷 余克龙 陈少钟 张吉峰. 基于ANSYS和ADAMS空间四连杆引纬机构的柔性动力学仿真[J]. 纺织学报, 2013, 34(5): 116-120. |
| [14] | 宋亚男, 徐荣华, 王钦若. 剑杆织机经纱张力控制中滤波器设计与分析[J]. 纺织学报, 2012, 33(2): 115-120. |
| [15] | 徐荣华 王钦若 宋亚男. 剑杆织机经纱张力控制中噪声信号估计与滤波[J]. 纺织学报, 2011, 32(8): 128-132. |
|
||
 京公网安备11010502044800号
京公网安备11010502044800号