纺织学报 ›› 2021, Vol. 42 ›› Issue (04): 191-200.doi: 10.13475/j.fzxb.20200405010
• 综合述评 • 上一篇
吴柳波1,2, 李新荣1,2( ), 杜金丽3
), 杜金丽3
WU Liubo1,2, LI Xinrong1,2(), DU Jinli3
摘要:
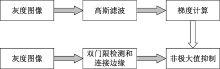
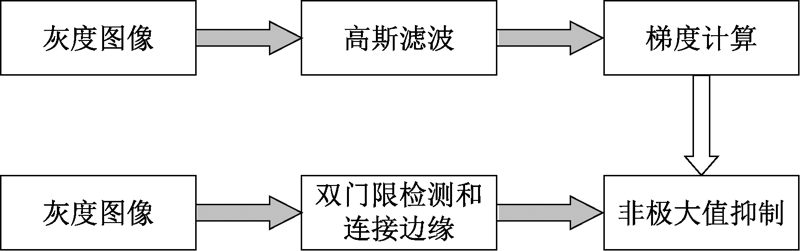
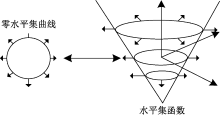
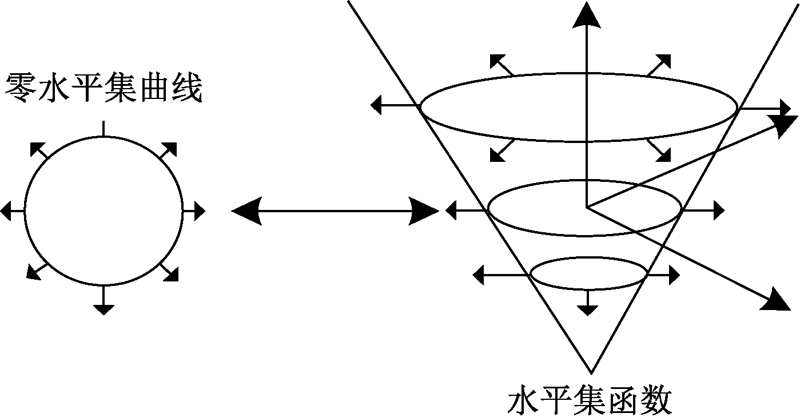
为有效解决服装行业工人短缺与生产效率低的问题,提高服装行业全自动化、无人化生产技术,对近年来工业协作型缝纫机器人研究中的2大核心技术(机器视觉轮廓提取算法与工业机器人运动轨迹优化)的最新研究进展进行综述,介绍了机器视觉轮廓提取中的几种算法和机器人运动轨迹的优化方法,分析了各轮廓提取算法的优缺点与其在服装行业中的实际应用、机器人各运动轨迹优化算法的精度与其对缝纫时的影响。指出基于轮廓提取的工业协作型缝纫机器人在服装生产、面料与缝纫头缝合时如何保护面料的平展性是下一步研究的重点,并对基于轮廓提取的工业协作型缝纫机器人在实现服装行业全自动化、无人化生产中的实际应用进行展望。
中图分类号:
| [1] | 张旭靖, 王立川, 陈雁. 基于遗传算法的服装缝制生产线平衡优化[J]. 纺织学报, 2020,41(2):125-129. |
| ZHANG Xujing, WANG Lichuan, CHEN Yan. Balance optimization of garment sewing line based on genetic algorithm[J]. Journal of Textile Research, 2020,41(2):125-129. | |
| [2] | 徐涛, 马克, 刘才华. 基于深度学习的行人多目标跟踪方法综述[J]. 吉林大学学报(工学版), 2020.DOI: 10.13229/j.cnki.jdxbgxb20200509. |
| XU Tao, MA Ke, LIU Caihua. A review of pedestrian multi-target tracking methods based on deep learning[J]. Journal of Jilin University(Engineering and Technology Edition), 2020.DOI: 10.13229/j.cnki.jdxbgxb20200509. | |
| [3] | 王志江, 薛坤喜, 吴定勇, 等. 基于视觉传感的机器人焊缝纠偏控制系统[J]. 机械工程学报, 2019,55(17):48-55. |
| WANG Zhijiang, XUE Kunxi, WU Dingyong, et al. Control system of robot weld seam deviation correction based on visual sensing[J]. Journal of Mechanical Engineering, 2019,55(17):48-55. | |
| [4] | 何银水, 余卓骅, 李健, 等. 基于视觉特征的厚板机器人焊接焊缝轮廓的有效提取[J]. 机械工程学报, 2019,55(17):56-60. |
| HE Yinshui, YU Zhuohua, LI Jian, et al. Effective extraction of welding seam contour of thick plate robot based on visual features[J]. Journal of Mechanical Engineering, 2019,55(17):56-60. | |
| [5] | 曾锦乐. 基于多视觉特征获取与融合的焊道轨迹自动识别[J]. 机械工程学报, 2019,55(7):127. |
| ZENG Jinle. Automatic recognition of weld track based on multi-visual feature acquisition and fusion[J]. Journal of Mechanical Engineering, 2019,55(7):127. | |
| [6] | 李新荣, 刘汉邦, 杨帅, 等. 一种基于附壁效应的非接触吸盘:202010713954.2[P]. 2020-10-16. |
| LI Xinrong, LIU Hanbang, YANG Shuai, et al. A non-contact sucker based on wall-attaching effect:202010713954.2[P]. 2020-10-16. | |
| [7] | 李新荣, 吴柳波, 李丹丹, 等. 一种协同自动缝纫设备:202010714878.7[P]. 2020-10-27. |
| LI Xinrong, WU Liubo, LI Dandan, et al. A collaborative automatic sewing device:202010714878.7[P]. 2020-10-27. | |
| [8] | 李新荣, 刘汉邦, 刘立东, 等. 一种面向服装面料的静电吸附力建模方法:202011243891.5[P]. 2020-11-10. |
| LI Xinrong, LIU Hanbang, LIU Lidong, et al. A modeling method of electrostatic adsorption force for garment fabric:202011243891.5[P]. 2020-11-10. | |
| [9] | 曹辉, 杨理践, 刘俊甫, 等. 基于数据融合的小波变换漏磁异常边缘检测[J]. 仪器仪表学报, 2019,40(12):71-79. |
| CAO Hui, YANG Lijian, LIU Junfu, et al. Edge detection of magnetic leakage anomaly based on wavelet transform[J]. Chinese Journal of Scientific Instrument, 2019,40(12):71-79. | |
| [10] | 巨志勇, 薛永杰, 张文馨, 等. 自适应阈值Prewitt的石榴病斑检测算法[J]. 农业工程学报, 2020,36(8):135-142. |
| JU Zhiyong, XUE Yongjie, ZHANG Wenxin, et al. Detection algorithm of pomegranate disease spot Prewitt adaptive threshold[J]. Transactions of the Chinese Society of Agricultural Engineering, 2020,36(8):135-142. | |
| [11] | 张英明, 李永亮, 张翼鹏, 等. 激光光斑边缘检测算子的研究进展[J]. 量子光学学报, 2019,25(1):109-116. |
| ZHANG Yingming, LI Yongliang, ZHANG Yipeng, et al. Research progress of laser spot edge detection operator[J]. Journal of Quantum Optics, 2019,25(1):109-116. | |
| [12] | 董雪, 林志贤, 郭太良. 基于LoG算子改进的自适应阈值小波去噪算法[J]. 液晶与显示, 2014,29(2):275-280. |
| DONG Xue, LIN Zhixian, GUO Tailiang. Improved self-adaptive threshold wavelet denoising analysis based on LoG operator[J]. Chinese Journal of Liquid Crystals and Displays, 2014,29(2):275-280. | |
| [13] | 李长有, 陈国玺, 丁云晋. 改进Canny算子的边缘检测算法[J]. 小型微型计算机系统, 2020,41(8):1758-1762. |
| LI Changyou, CHEN Guoxi, DING Yunjin. An improved edge detection algorithm for Canny operators[J]. Journal of Chinese Computer Systems, 2020,41(8):1758-1762. | |
| [14] | 孙波. 基于Canny边缘检测法的印花织物图案轮廓提取[J]. 印染助剂, 2018,35(7):31-33. |
| SUN Bo. Pattern contour extraction of printed fabric based on Canny edge detection method[J]. Textile Auxiliaries, 2018,35(7):31-33. | |
| [15] | 向军, 张杰, 潘如如, 等. 采用纹理平滑的印花织物图案轮廓提取[J]. 纺织学报, 2017,38(11):162-167. |
| XIANG Jun, ZHANAG Jie, PAN Ruru, et al. Graphic contour extraction for printed fabric based on texture smoothing[J]. Journal of Textile Research, 2017,38(11):162-167. | |
| [16] | 宋浒, 张利, 许梦晗, 等. 基于形态学和小波变换的图像边缘检测方法[J]. 西南大学学报(自然科学版), 2020,42(4):105-111. |
| SONG Hu, ZHANG Li, XU Menghan, et al. Image edge detection based on morphology and wavelet transform[J]. Journal of Southwest University(Natural Science Edition), 2020,42(4):105-111. | |
| [17] | 吴朔媚, 韩明, 王敬涛. 基于多尺度多方向结构元素的形态学图像边缘检测算法[J]. 量子电子学报, 2017,34(3):278-285. |
| WU Shuomei, HAN Ming, WANG Jingtao. Morphology image edge detection algorithm based on multi-scale and multi-direction structural elements[J]. Chinese Journal of Quantum Electronics, 2017,34(3):278-285. | |
| [18] | 刘晓刚, 闫红方, 张荣. 基于形态学多尺度多结构的熔池图像边缘检测[J]. 热加工工艺, 2019,48(5):216-219. |
| LIU Xiaogang, YAN Hongfang, ZHANG Rong. Edged etection of molten pool images based on morphological multi-scale and multi-structure[J]. Hot Working Technology, 2019,48(5):216-219. | |
| [19] | OSHER S, SETHIAN J A. Fronts propagating with curvature-dependent speed: algorithms based on Hamilton-Jacobi formulations[J]. Journal of Computational Physics, 1988,79(1):12-49. |
| [20] | 翁桂荣, 何志勇. 基于自适应符号函数的主动轮廓模型[J]. 软件学报, 2019,30(12):3892-3906. |
| WENG Guirong, HE Zhiyong. Active contour model based on adaptive sign function[J]. Journal of Software, 2019,30(12):3892-3906. | |
| [21] | 董恩增, 冯倩, 于晓, 等. 基于主动轮廓模型的红外图像轮廓提取算法[J]. 激光与红外, 2017,47(3):379-384. |
| DONG Enzeng, FENG Qian, YU Xiao, et al. Improved contour extraction algorithm of infrared images based on active contour models[J]. Laser & Infrared, 2017,47(3):379-384. | |
| [22] | 韩哲, 李灯熬, 赵菊敏, 等. 基于改进遗传模糊聚类和水平集的图像分割算法[J]. 计算机工程与设计, 2019,40(5):1390-1393,1412. |
| HAN Zhe, LI Dengao, ZHAO Jumin, et al. Image segmentation algorithm based on improved genetic fuzzy clustering and level set[J]. Computer Engineering and Design, 2019,40(5):1390-1393,1412. | |
| [23] | 赵方珍, 罗兰花, 梁海英, 等. 改进的水平集方法及其在图像分割中的应用[J]. 数学的实践与认识, 2019,49(22):154-162. |
| ZHAO Fangzhen, LUO Lanhua, LIANG Haiying, et al. Improved level set method and its application to image segmentation[J]. Mathematics in Practice and Theory, 2019,49(22):154-162. | |
| [24] | 谢志伟, 平继伟, 彭博, 等. 基于邻域特征的电子地图道路交叉点自动提取[J]. 中国科技论文, 2020,15(5):599-604. |
| XIE Zhiwei, PING Jiwei, PENG Bo, et al. Automatic extraction of intersection points of electronic map road based on neighborhood features[J]. China Science Paper, 2020,15(5):599-604. | |
| [25] | 冯毅雄, 李康杰, 高一聪, 等. 面向视觉伺服的工业机器人轮廓曲线角点识别[J]. 浙江大学学报(工学版), 2020,54(8):1449-1456. |
| FENG Yixiong, LI Kangjie, GAO Yicong, et al. Identification of corner points of contour curves of industrial robots oriented to visual servo[J]. Journal of Zhejiang University(Engineering Science), 2020,54(8):1449-1456. | |
| [26] | 刘梅华, 汪东, 柳惠秋. 一种改进的轮廓跟踪算法[J]. 机械设计与制造, 2008(5):45-47. |
| LIU Meihua, WANG Dong, LIU Huiqiu. A improved method of contour tracing[J]. Machinery Design & Manufacture, 2008(5):45-47. | |
| [27] | 郑丽萍, 李光耀, 薛凌燕. 基于双向轮廓跟踪的面部轮廓线生成算法[J]. 计算机工程与设计, 2010(2):447-450. |
| ZHENG Liping, LI Guangyao, XUE Lingyan. Generation algorithm of facial contour lines based on bidirectional contour tracking[J]. Computer Engineering and Design, 2010(2):447-450. | |
| [28] | 任民宏. 轮廓跟踪算法的改进及在字符识别技术中的应用[J]. 计算机应用, 2006,26(10):2378-2379. |
| REN Minhong. Improvement of contour following algorithm and its application in character recogni-tion[J]. Journal of Computer Applications, 2006,26(10):2378-2379. | |
| [29] | 桑红石, 傅勇, 张天序, 等. 基于标记信息的快速轮廓跟踪算法[J]. 华中科技大学学报(自然科学版), 2005,33(9):1-4. |
| SANG Hongshi, FU Yong, ZHANG Tianxu, et al. Quick approaches for contour following based on connected component labeling[J]. Journal of Huazhong University of Science and Technology(Natural Science Edition), 2005,33(9):1-4. | |
| [30] | 郭勇, 赖广. 工业机器人关节空间轨迹规划及优化研究综述[J]. 机械传动, 2020,44(2):154-165. |
| GUO Yong, LAI Guang. Review of joint space trajectory planning and optimization for industrial robot[J]. Journal of Mechanical Transmission, 2020,44(2):154-165. | |
| [31] | ABUDAKKA F J, ASSAD I F, ALKHDOUR R M, et al. Statistical evaluation of an evolutionary algorithm for minimum time trajectory planning problem for industrial robots[J]. International Journal of Advanced Manufacturing Technology, 2016,89(1-4):1-18. |
| [32] | VULLIEZ M, LAVERNHE S, BRUNEAU O. Dynamic approach of the feedrate interpolation for trajectory planning process in multiaxis machining[J]. The International Journal of Advanced Manufacturing Technology, 2017,88(5-8):2085-2096. |
| [33] | CHEN S L, YOU I T. Kinematic and singularity analyses of a six dof 6-3-3 parallel link machine tool[J]. International Journal of Advanced Manufacturing Technology, 2000,16(11):835-842. |
| [34] | 江国豪, 周圆圆, 张芳敏, 等. 关节联动的单孔手术机器人运动解耦方法[J]. 机器人, 2020,42(4):469-476. |
| JIANG Guohao, ZHOU Yuanyuan, ZHANG Fangmin, et al. Motion decoupling method for a single-hole robot with joint linkage[J]. Robot, 2020,42(4):469-476. | |
| [35] | 桑董辉, 陈原, 高军. 由2自由度并联髋关节构成的脊柱式四足步行机器人步态规划和稳定性分析[J]. 兵工学报, 2020,41(6):1188-1200. |
| SANG Donghui, CHEN Yuan, GAO Jun. Gait planning and stability analysis of spinal quadruped walking robot with 2-DOF parallel hip joint[J]. Acta Armamentarii, 2020,41(6):1188-1200. | |
| [36] | 谭月胜, 孙汉旭, 贾庆轩, 等. 旋量理论在机械臂末端执行器运动精度分析中的应用研究[J]. 机械科学与技术, 2006,25(5):534-538. |
| TAN Yuesheng, SUN Hanxu, JIA Qingxuan, et al. Research on screw theory application to kinematic accuracy for a manipulator end-effector[J]. Mechanical Science and Technology, 2006,25(5):534-538. | |
| [37] | 伯艳广. 基于神经网络的液压柔性机械臂运动轨迹的跟踪控制[J]. 液压与气动, 2017(10):102-106. |
| BO Yanguang. Neural network-based tracking control on movement trajectory of hydraulic flexible manipul-ator[J]. Chinese Hydraulics & Pneumatics, 2017(10):102-106. | |
| [38] | 董云, 杨涛, 李文. 基于解析法和遗传算法的机械手运动学逆解[J]. 计算机仿真, 2012,29(3):239-243. |
| DONG Yun, YANG Tao, LI Wen. Algorithm based on analytical method and genetic algorithm for inverse kinematics of redundant manipulator[J]. Computer Simulation, 2012,29(3):239-243. | |
| [39] | 桑董辉, 陈原, 高军. 轮-腿复合移动机器人RUPU-RUPR球面并联腿机构动力学研究[J]. 农业机械学报, 2017,48(8):376-383. |
| SANG Donghui, CHEN Yuan, GAO Jun. Dynamic study on RUPU-RUPR spherical parallel leg mechanism of wheel-leg composite mobile robot[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017,48(8):376-383. | |
| [40] | 叶平, 孙汉旭, 谭月胜, 等. 旋量理论与矢量积法相结合求解雅可比矩阵[J]. 机械科学与技术, 2005,24(3):353-356. |
| YE Ping, SUN Hanxu, TAN Yuesheng, et al. A modified method for jacobian matrix with screw theory and vector product[J]. Mechanical Science and Technology, 2005,24(3):353-356. | |
| [41] | 熊超, 张鹏超, 冯博琳, 等. 基于并行RBF神经网络的机器人逆运动求解[J]. 组合机床与自动化加工技术, 2017(10):34-36. |
| XIONG Chao, ZHANG Pengchao, FENG Bolin, et al. Solution to inverse kinematics of robot based on parallel RBF neural networks[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2017(10):34-36. | |
| [42] | 李进, 刘璇, 张建华, 等. 基于RBF神经网络间接求取运动学逆解的研究[J]. 机床与液压, 2019,47(23):32-37. |
| LI Jin, LIU Xuan, ZHANG Jianhua, et al. A study on indirect kinematics reverse solution based on RBF neural net work[J]. Machine Tool & Hydraulics, 2019,47(23):32-37. | |
| [43] | 赵晓露, 孔繁学, 刘德亮, 等. 服装模板缝制工艺与设备的发展状况[J]. 毛纺科技, 2019,47(2):45-49. |
| ZHAO Xiaolu, KONG Fanxue, LIU Deliang, et al. Development of garment formwork sewing technology and equipment[J]. Wool Textile Journal, 2019,47(2):45-49. | |
| [44] | 周云松, 裴以建, 余江, 等. 双足行走机器人步态轨迹规划[J]. 云南大学学报(自然科学版), 2006,28(1):20-26. |
| ZHOU Yunsong, PEI Yijian, YU Jiang, et al. The planning walking trajectory of biped humanoid robot[J]. Journal of Yunnan University(Natural Sciences Edition), 2006,28(1):20-26. | |
| [45] | 孙玥, 魏欣. 基于五次多项式的码垛机器人轨迹规划[J]. 包装工程, 2017,38(21):159-163. |
| SUN Yue, WEI Xin. Trajectory planning of palletizing robot based on quintic polynomial[J]. Packaging Engineering, 2017,38(21):159-163. | |
| [46] | 刘晓麟, 林仕高, 欧元贤. 双五次多项式过渡机械手轨迹规划[J]. 机械设计与制造, 2014(4):40-43. |
| LIU Xiaolin, LIN Shigao, OU Yuanxian. The trajectory planning of manipulator double-quintic transition[J]. Machinery Design & Manufacture, 2014(4):40-43. | |
| [47] | BORYGA M, GRABOS A. Planning of manipulator motion trajectory with higher-degree polynomials use[J]. Mechanism and Machine Theory, 2009,44(7):1400-1419. |
| [48] | 李海虹, 林贞国, 杜娟, 等. 挖掘机自主挖掘分段可变阶多项式轨迹规划[J]. 农业机械学报, 2016,47(4):319-325. |
| LI Haihong, LIN Zhenguo, DU Juan, et al. Piecewise polynomial with variable order in trajectory planning for autonomous mining[J]. Transactions of the Chinese Society of Agricultural Machinery, 2016,47(4):319-325. | |
| [49] | 孙志毅, 张韵悦, 李虹, 等. 挖掘机的最优时间轨迹规划[J]. 机械工程学报, 2019(5):166-174. |
| SUN Zhiyi, ZHANG Yunyue, LI Hong, et al. Time optimal trajectory planning of excavator[J]. Chinese Journal of Mechanical Engineering, 2019(5):166-174. | |
| [50] | 陈晗, 李林升. 基于复合形法的时间最优机械臂轨迹规划[J]. 机械传动, 2019,43(3):72-75. |
| CHEN Han, LI Linsheng. Trajectory planning of time optimal manipulator based on complex method[J]. Journal of Mechanical Transmission, 2019,43(3):72-75. | |
| [51] | 沈岳, 陈雁. 影响缝纫质量因素的灰色统计评价[J]. 纺织学报, 2008,29(8):93-95. |
| SHEN Yue, CHEN Yan. Grey statistics evaluation of factors influencing sewing quality[J]. Journal of Textile Research, 2008,29(8):93-95. | |
| [52] | 赵晓露, 孔繁学, 刘德亮, 等. 服装模板缝制工艺与设备的发展状况[J]. 毛纺科技, 2019,47(2):45-49. |
| ZHAO Xiaolu, KONG Fanxue, LIU Deliang, et al. Development of clothing template sewing technology and equipment[J]. Wool Textile Journal, 2019,47(2):45-49. | |
| [53] | 王芳. 服装缝纫设备对服装造型的影响[J]. 轻纺工业与技术, 2013(1):78-79. |
| WANG Fang. Influence of clothing sewing equipment on garment modeling[J]. Light and Textile Industry and Technology, 2013(1):78-79. | |
| [54] | 韩亚军, 刘家英. 基于B样条曲线的工业机器人运动轨迹误差优化研究[J]. 中国工程机械学报, 2020,18(3):199-204. |
| HAN Yajun, LIU Jiaying. A study on the optimization of trajectory error of industrial robot based on B spline curve[J]. Chinese Journal of Construction Machinery, 2020,18(3):199-204. | |
| [55] | 胡嘉阳, 韦巍. 基于五次NURBS曲线的六轴机器人多目标轨迹优化[J]. 电子测量与仪器学报, 2020,34(6):198-203. |
| HU Jiayang, WEI Wei. Optimization of multi-objective trajectory of six-axis robot based on quadratic NURBS curve[J]. Journal of Electronic Measurement and Instrumentation, 2020,34(6):198-203. | |
| [56] | 李林峰, 马蕾. 三次均匀B样条在工业机器人轨迹规划中的应用研究[J]. 科学技术与工程, 2013(13):3621-3625. |
| LI Linfeng, MA Lei. A research on the cubic uniform B-spline curve and its application on trajectory planning algorithm of industry robot[J]. Science Technology and Engineering, 2013(13):3621-3625. |
| [1] | 田宇航, 王绍宗, 张文昌, 张倩. 基于机器视觉的单组分染液浓度快速检测方法[J]. 纺织学报, 2021, 42(03): 115-121. |
| [2] | 刘立东, 李新荣, 刘汉邦, 李丹丹. 基于纬编针织物特性的静电吸附力模型[J]. 纺织学报, 2021, 42(03): 161-168. |
| [3] | 冯文倩, 李新荣, 杨帅. 人体轮廓机器视觉检测算法的研究进展[J]. 纺织学报, 2021, 42(03): 190-196. |
| [4] | 朱世根, 杨宏贤, 白云峰, 丁浩, 朱巧莲. 长条状细薄带钩零件变形自动检测系统[J]. 纺织学报, 2020, 41(10): 158-163. |
| [5] | 张建新, 李琦. 基于机器视觉的筒子纱密度在线检测系统[J]. 纺织学报, 2020, 41(06): 141-146. |
| [6] | 路浩, 陈原. 基于机器视觉的碳纤维预浸料表面缺陷检测方法[J]. 纺织学报, 2020, 41(04): 51-57. |
| [7] | 王文胜, 李天剑, 冉宇辰, 卢影, 黄民. 筒子纱纱笼纱杆的定位检测方法[J]. 纺织学报, 2020, 41(03): 160-167. |
| [8] | 金守峰, 林强强, 马秋瑞, 张浩. 基于BP神经网络的织物表面绒毛质量的检测方法[J]. 纺织学报, 2020, 41(02): 69-76. |
| [9] | 景军锋, 张君扬, 张缓缓, 苏泽斌. 梯度空间下的丝饼表面缺陷检测[J]. 纺织学报, 2020, 41(02): 44-51. |
| [10] | 孙卫红, 阮棉奖, 邵铁锋, 梁曼. 基于机器视觉的生丝抱合性能检测方法[J]. 纺织学报, 2019, 40(08): 164-168. |
| [11] | 景军锋, 张星星. 基于机器视觉的玻璃纤维管纱毛羽检测[J]. 纺织学报, 2019, 40(05): 157-162. |
| [12] | 徐洋, 朱治潮, 盛晓伟, 余智祺, 孙以泽. 基于机器视觉的鞋面特征点自动识别改进方法[J]. 纺织学报, 2019, 40(03): 168-174. |
| [13] | 景军锋, 郭根. 基于机器视觉的丝饼毛羽检测[J]. 纺织学报, 2019, 40(01): 147-152. |
| [14] | 贾小军 邓海涛 滕姿 曾丹. 应用轮廓线拟合提取蓝印花布图案基元[J]. 纺织学报, 2018, 39(08): 150-157. |
| [15] | 牟新刚 蔡逸超 周晓 陈国良. 基于机器视觉的筒子纱缺陷在线检测系统[J]. 纺织学报, 2018, 39(01): 139-145. |
| Viewed | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
Full text 182
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
Abstract 507
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
Cited |
|
|||||||||||||||||||||||||||||||||||||||||||||||||
| Shared | ||||||||||||||||||||||||||||||||||||||||||||||||||
| Discussed | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
||
 京公网安备11010502044800号
京公网安备11010502044800号