纺织学报 ›› 2022, Vol. 43 ›› Issue (02): 208-213.doi: 10.13475/j.fzxb.20210603206
刘汉邦1,2, 李新荣1,2( ), 冯文倩1,2, 吴柳波1,2, 袁汝旺1,2
), 冯文倩1,2, 吴柳波1,2, 袁汝旺1,2
LIU Hanbang1,2, LI Xinrong1,2(), FENG Wenqian1,2, WU Liubo1,2, YUAN Ruwang1,2
摘要:
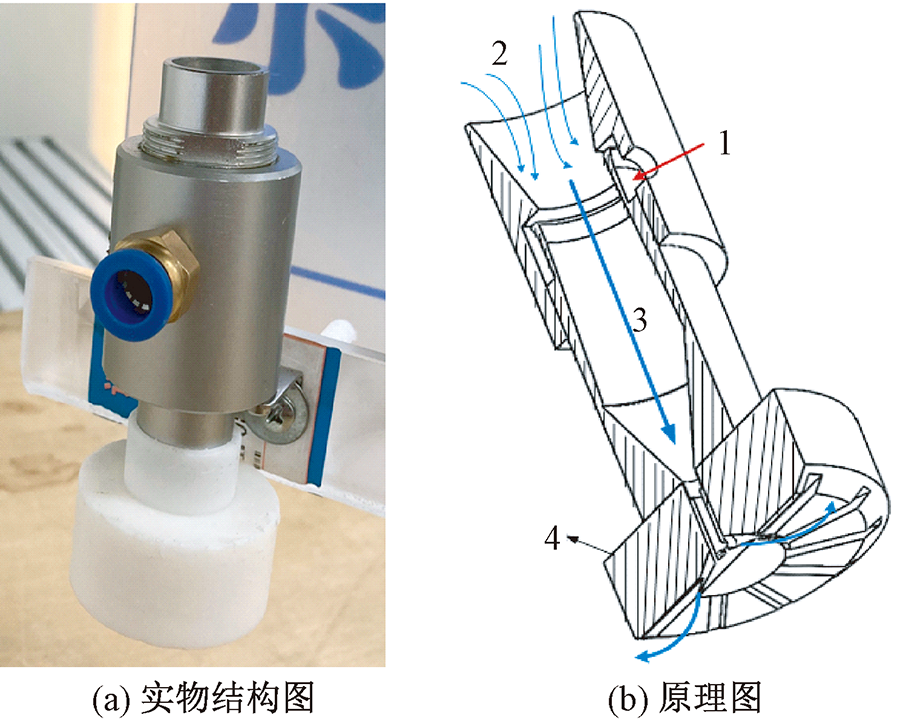
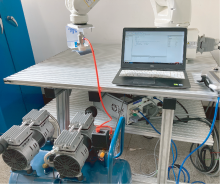
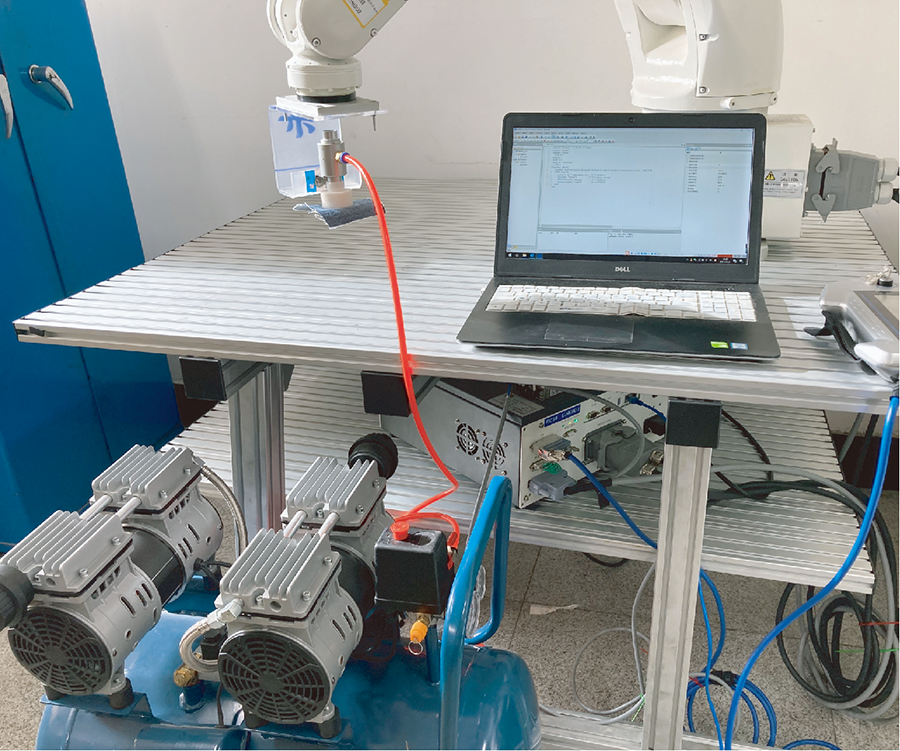
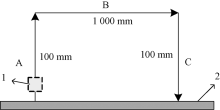
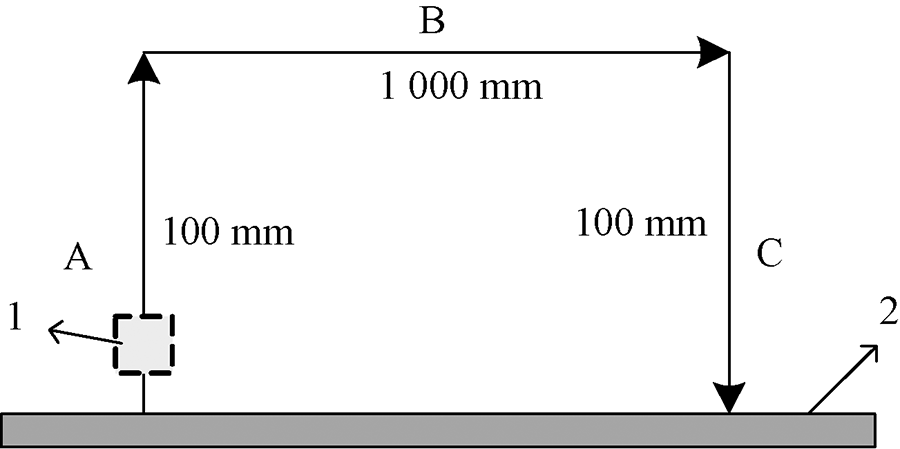
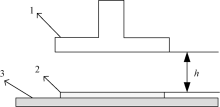
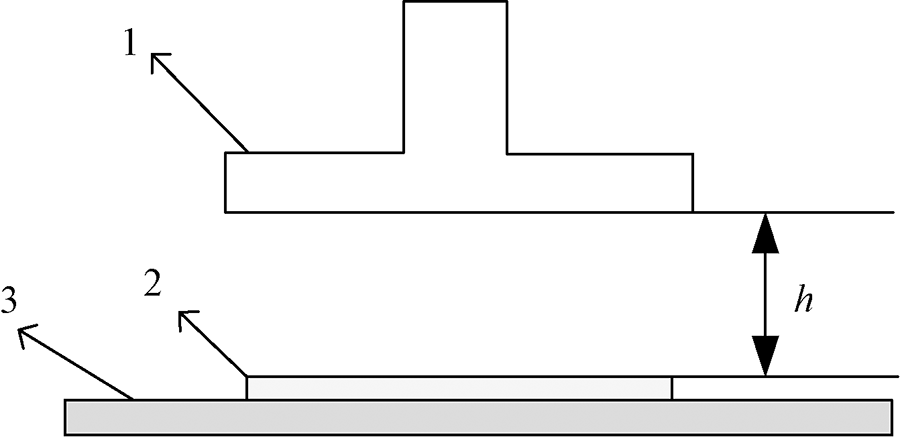
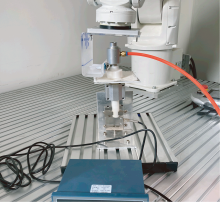
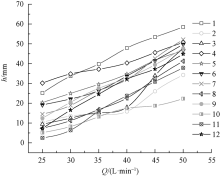
服装面料自动抓取及转移是服装行业自动化生产的关键。为提高服装生产中的加工效率,针对当前服装面料抓取方式存在的表面划痕和吸附力不足等问题,研究了柯恩达效应式非接触夹持器对抓取服装面料的影响。首先分析了柯恩达效应式非接触夹持器的结构及工作机制;其次对不同织物参数的服装面料进行吸附性能测量实验;最后对不同织物参数服装面料的吸附性能进行对比分析。实验结果表明:柯恩达效应式非接触夹持器可实现无接触抓取多种服装面料,解决了服装面料在生产程中接触划痕和吸附力不足的问题。此研究可有效减少细菌及病毒在服装面料抓取转移中的传播,并为实现服装面料的自动化生产提供技术支撑。
中图分类号:
| [1] | KOUSTOUMPARDIS N. A 3-finger robotic gripper for grasping fabrics based on cams-followers mecha-nism[C]// SMYRNIS S, ASPRAGATHOS N A. Advances in Service and Industrial Robotics. Cham: Springer Cham, 2017: 612-620. |
| [2] |
BIGANZOLI F, FANTONI G. A self-centering electrostatic microgripper[J]. Journal of Manufacturing Systems, 2008, 27(3): 136-144.
doi: 10.1016/j.jmsy.2008.11.002 |
| [3] | SUN B. A New electrostatic gripper for flexible handling of fabrics in automated garment manufacturing[C]// ZHANG X Y. 2019 IEEE 15th International Conference on Automation Science and Engineering (CASE). Vancouver: IEEE Computer Society, 2019: 879-884. |
| [4] |
FANTONI G, SANTOCHI M, DINI G, et al. Grasping devices and methods in automated production pro-cesses[J]. CIRP Annals-Manufacturing Technology, 2014, 63(2): 679-701.
doi: 10.1016/j.cirp.2014.05.006 |
| [5] | DAVIS S, GRAY J O, CALDWELL D G. An end effector based on the Bernoulli principle for handling sliced fruit and vegetables[J]. Robotics & Computer Integrated Manufacturing, 2008, 24(2): 249-257. |
| [6] |
MORIYA Y, TANAKA D, YAMAZAKI K, et al. A method of picking up a folded fabric product by a single-armed robot[J]. Robomech Journal, 2018, 5(1): 1-12.
doi: 10.1186/s40648-017-0098-y |
| [7] |
YUBA H, ARNOLD S, YAMAZAKI K. Unfolding of a rectangular cloth from unarranged starting shapes by a Dual-Armed robot with a mechanism for managing recognition error and uncertainty[J]. Advanced Robotics, 2017, 31(10): 31: 1-13.
doi: 10.1080/01691864.2016.1266119 |
| [8] |
FAILLI F, DINI G. An innovative approach to the automated stacking and grasping of leather plies[J]. CIRP Annals: Manufacturing Technology, 2004, 53(1): 31-34.
doi: 10.1016/S0007-8506(07)60638-6 |
| [9] |
CUBRIC G, SALOPEK C I. Study of grippers in automatic handling of nonwoven material[J]. Journal of the Institution of Engineers (India): Series E, 2019, 100(2): 167-173.
doi: 10.1007/s40034-019-00145-1 |
| [10] | ZHANG Z W. Modeling and analysis of electrostatic force for robot handling of fabric materials[J]. IEEE/ASME Transactions on Mechatronics, 1999, 4(1): 0-49. |
| [11] |
STEPHAN J, SELIGER G. Handling with ice-the cryo-gripper, a new approach[J]. Assembly Automation, 1999, 19(4): 332-337.
doi: 10.1108/01445159910295249 |
| [12] |
DINI G, FANTONI G, FAILLI F. Grasping leather plies by Bernoulli grippers[J]. CIRP Annals: Manufacturing Technology, 2009, 58(1): 21-24.
doi: 10.1016/j.cirp.2009.03.076 |
| [13] |
OZCELIK B, ERZINCANLI F. A non-contact end-effector for the handling of garments[J]. Robotica, 2002, 20(4): 447-450.
doi: 10.1017/S0263574702004125 |
| [14] |
LIU H B, LI X R, MA Q L, et al. Development non-contact gripper with flowrate-amplification using Coanda ejector[J]. Vacuum, 2021, 187(5): 110108.
doi: 10.1016/j.vacuum.2021.110108 |
| [15] | 刘汉邦, 李新荣, 刘立东. 服装面料自动抓取转移方法的研究进展[J]. 纺织学报, 2021, 42(1): 190-196. |
| LIU Hanbang, LI Xinrong, LIU Lidong. Research progress of automatic grabbing and transfer methods for garment fabrics[J]. Journal of Textiles Research, 2021, 42(1): 190-196. | |
| [16] | 邱茂伟, 王府梅. 机织物透气性能的预测研究[J]. 纺织学报, 2005, 26(4): 73-75. |
| QIU Maowei, WANG Fumei. Study on the prediction of woven fabrics air permeability[J]. Journal of Textiles Research, 2005, 26(4): 73-75. |
| [1] | 魏娜娜, 刘碟, 马政, 焦晨璐. 纤维素/壳聚糖磁性气凝胶的冻融法制备及其对染料吸附性能[J]. 纺织学报, 2022, 43(02): 53-60. |
| [2] | 田利强, 梁敏, 龙康, 陈秀清. 膨胀石墨负载纳米铁的制备及其对水中Cr(Ⅵ)及染料的去除[J]. 纺织学报, 2021, 42(06): 133-139. |
| [3] | 杨凯, 张啸梅, 焦明立, 贾万顺, 刁泉, 李咏, 张彩云, 曹健. 高邻位酚醛基纳米活性碳纤维制备及其吸附性能[J]. 纺织学报, 2020, 41(08): 1-8. |
| [4] | 方舟, 宋磊磊, 孙保金, 李文肖, 张超, 闫俊, 陈磊. 碳纳米纤维结构设计及其对水污染物吸附机制的研究进展[J]. 纺织学报, 2020, 41(08): 135-144. |
| [5] | 赵芷芪, 李秋瑾, 孙月静, 巩继贤, 李政, 张健飞. 磁性氧化石墨烯/聚丙烯胺盐酸盐微胶囊在染料吸附中的应用[J]. 纺织学报, 2020, 41(07): 109-116. |
| [6] | 刘雷艮, 沈忠安, 林振锋, 陶金. 聚乳酸/壳聚糖/Fe3O4超细纤维膜对酸性蓝MTR的吸附性能及机制[J]. 纺织学报, 2020, 41(05): 20-24. |
| [7] | 王杰, 汪滨, 杜宗玺, 李从举, 李秀艳, 安泊儒. 磺胺化聚丙烯腈纳米纤维膜的制备及其对Cr(VI)和Pb(II)的吸附性能[J]. 纺织学报, 2020, 41(01): 1-7. |
| [8] | 李阵群, 许多, 魏春艳, 钱永芳, 吕丽华. 棉秆皮纤维素/氧化石墨烯纤维的制备及其力学性能和吸附性能[J]. 纺织学报, 2020, 41(01): 15-20. |
| [9] | 徐春霞, 降帅, 韩阜益, 徐芳, 刘丽芳. 纤维素纳米纤丝气凝胶制备及其对亚甲基蓝的吸附性能[J]. 纺织学报, 2019, 40(10): 20-25. |
| [10] | 何俊燕, 李明福, 张劲, 庄志凯, 连文伟. 改性菠萝叶纤维结构及其吸附甲醛性能[J]. 纺织学报, 2019, 40(05): 1-6. |
| [11] | 张苏道, 薛文良, 魏孟媛, 周黄鹂. 眼动仪在服装面料色彩视觉评价中的应用[J]. 纺织学报, 2019, 40(03): 139-145. |
| [12] | 王建坤 郭晶 张昊 郑帼. 交联氨基淀粉对亚甲基蓝染料的吸附性能[J]. 纺织学报, 2018, 39(11): 103-110. |
| [13] | 陈莉 邹龙 孙卫国. 废弃亚麻热解处理吸油材料的制备及其吸附性能[J]. 纺织学报, 2017, 38(06): 17-22. |
| [14] | 刘玉森 陈莉 王驰. 稻秸秆纤维对Cu(Ⅱ)的吸附性能[J]. 纺织学报, 2016, 37(06): 13-17. |
| [15] | 周小溪 梁惠娥. 服装面料感性意象的评价与分析[J]. 纺织学报, 2015, 36(03): 99-104. |
| Viewed | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
Full text 112
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
Abstract 337
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
Cited |
|
|||||||||||||||||||||||||||||||||||||||||||||||||
| Shared | ||||||||||||||||||||||||||||||||||||||||||||||||||
| Discussed | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
 京公网安备11010502044800号
京公网安备11010502044800号