纺织学报 ›› 2022, Vol. 43 ›› Issue (09): 27-33.doi: 10.13475/j.fzxb.20210608307
高晓飞, 齐立哲( ), 孙云权
), 孙云权
GAO Xiaofei, QI Lizhe(), SUN Yunquan
摘要:
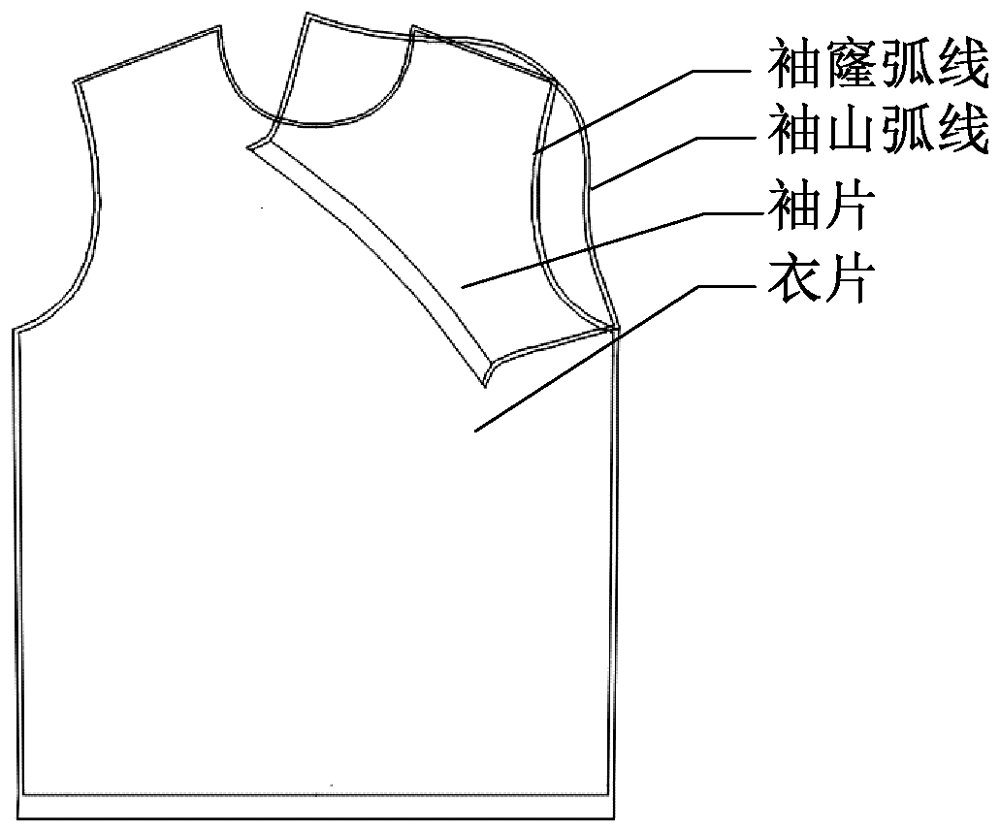
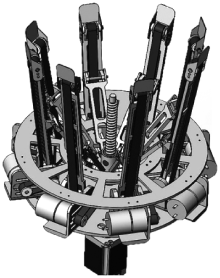
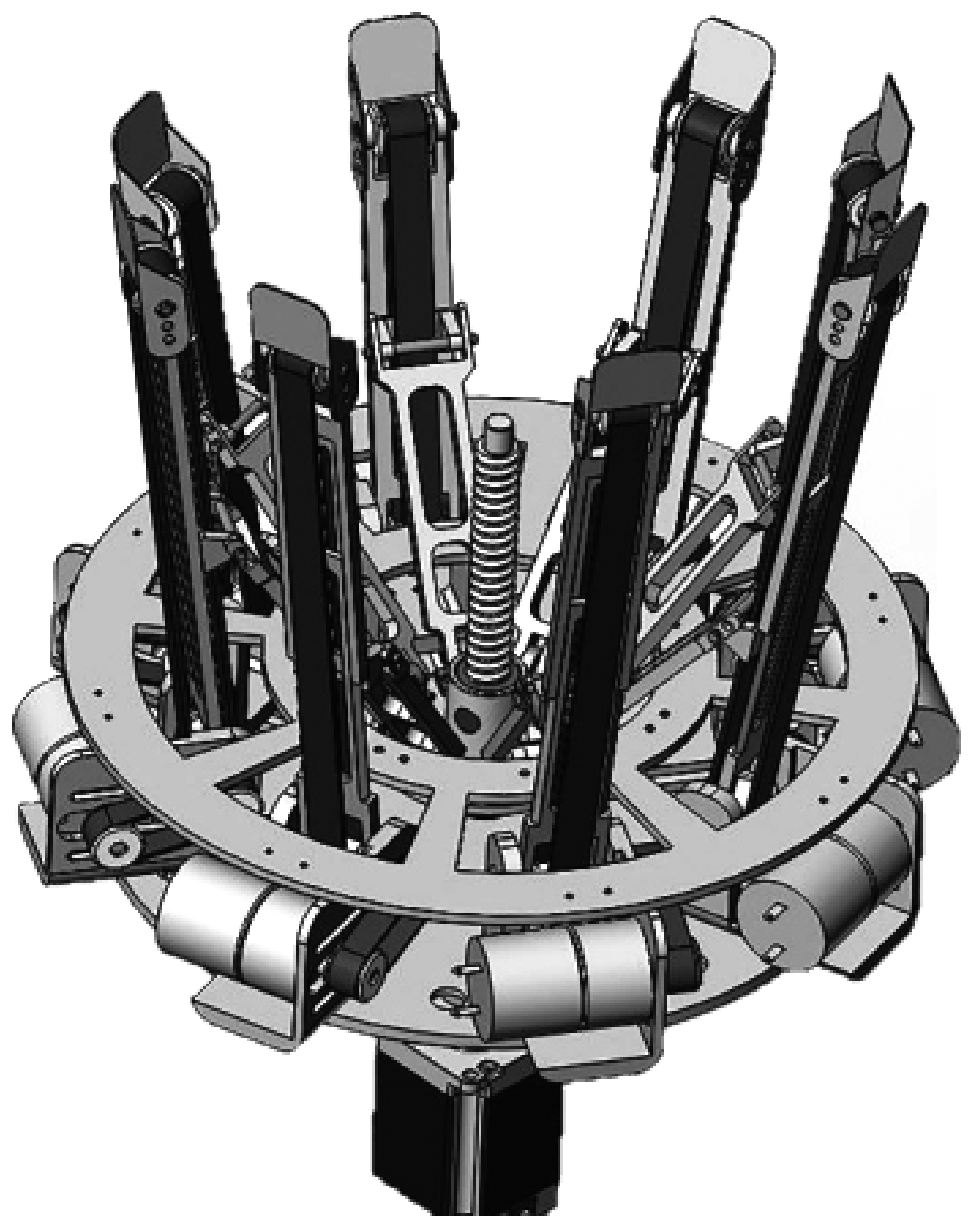
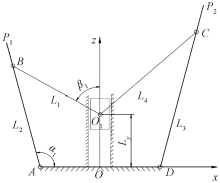
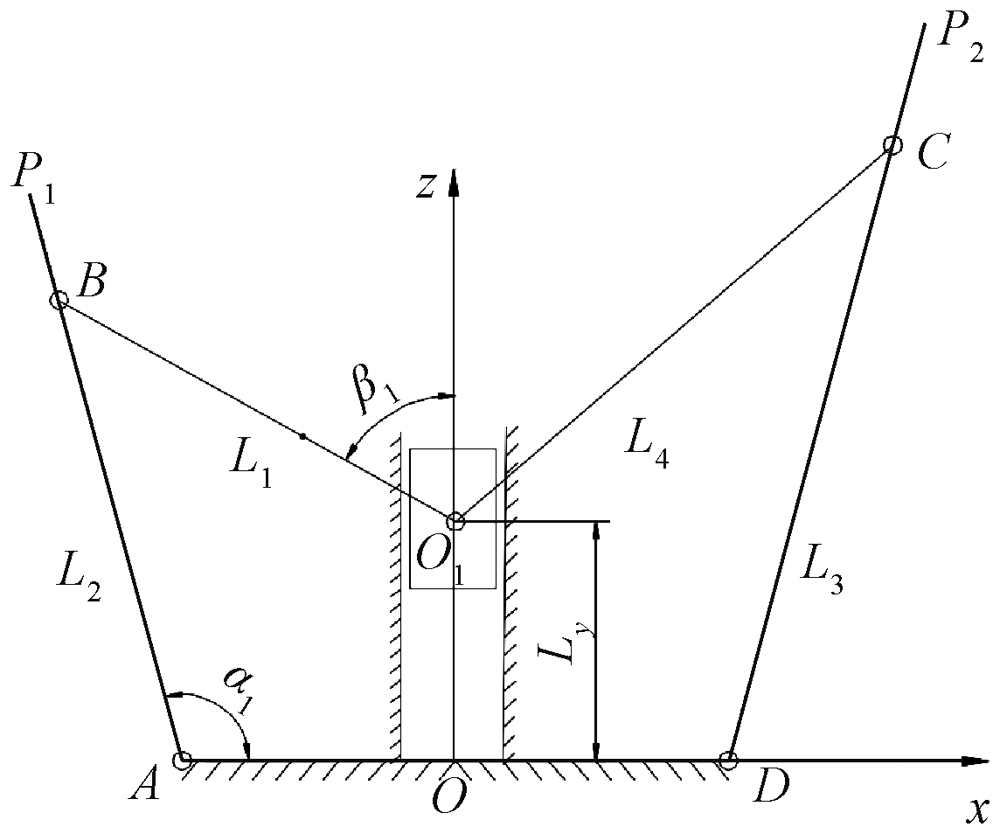
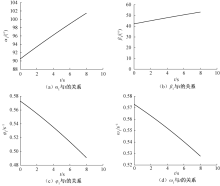
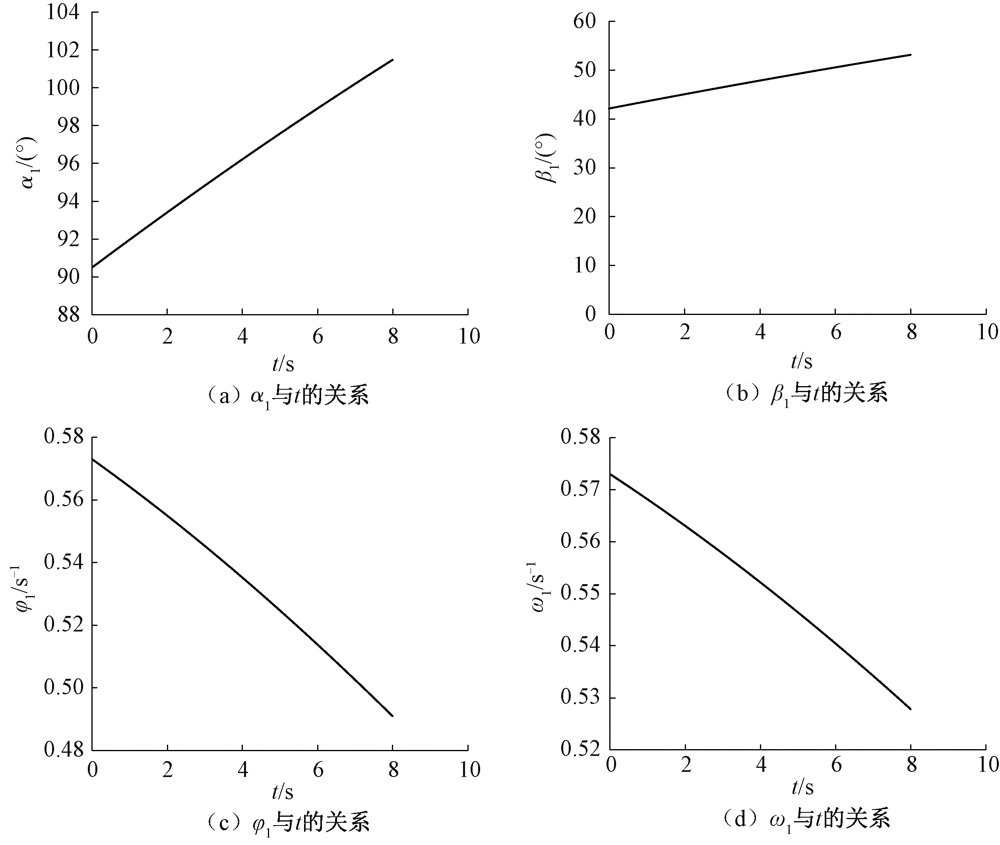
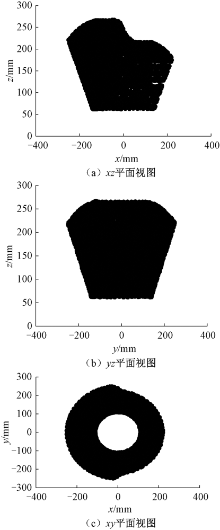
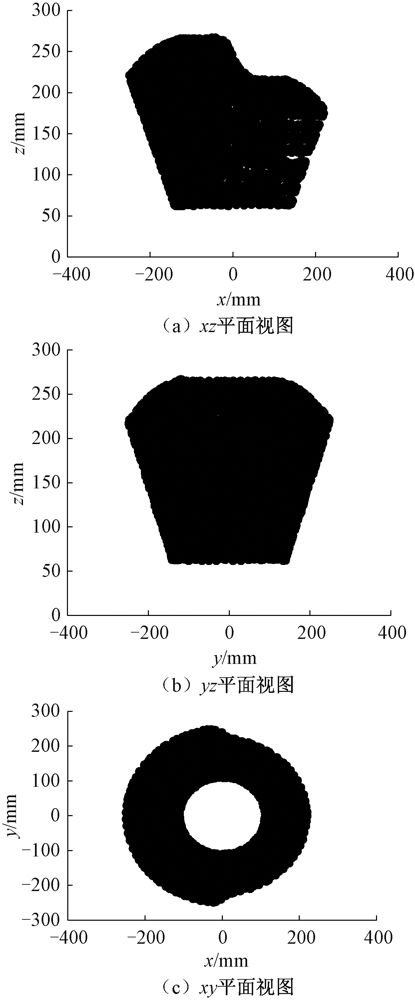
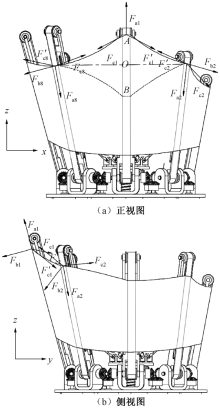
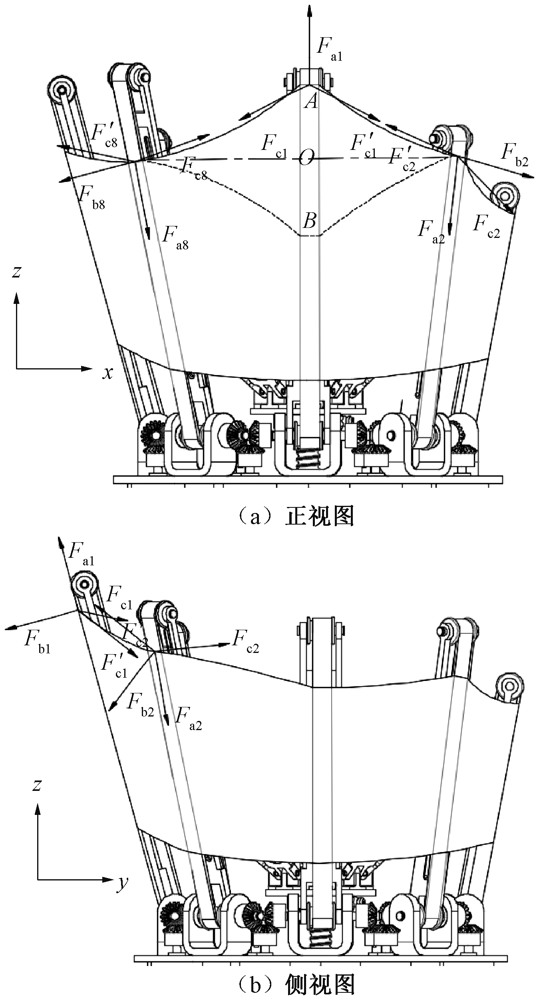
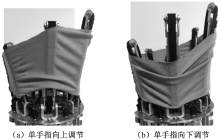
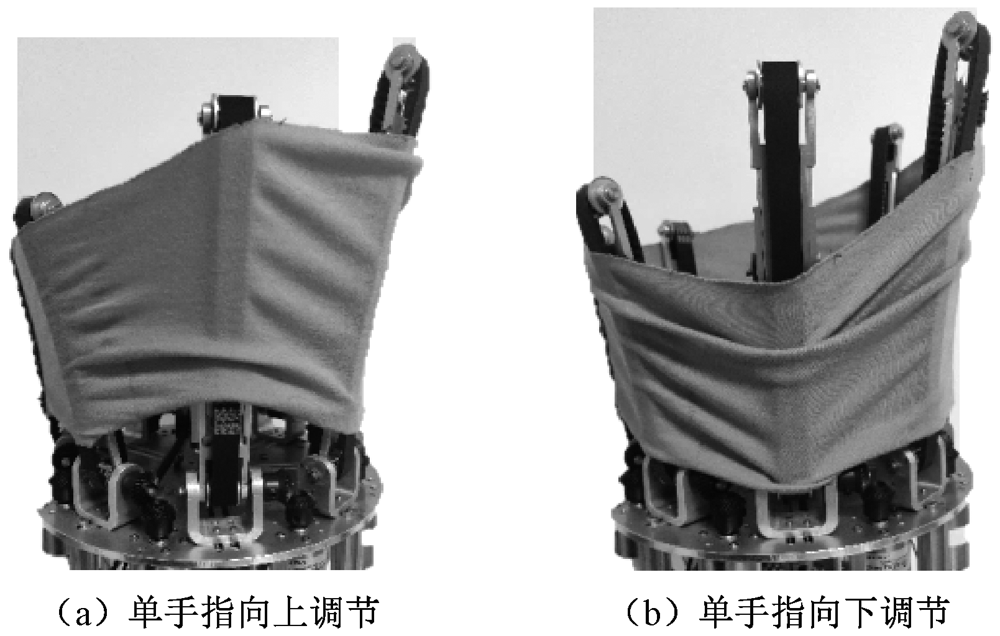
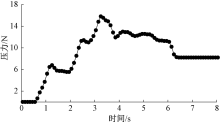
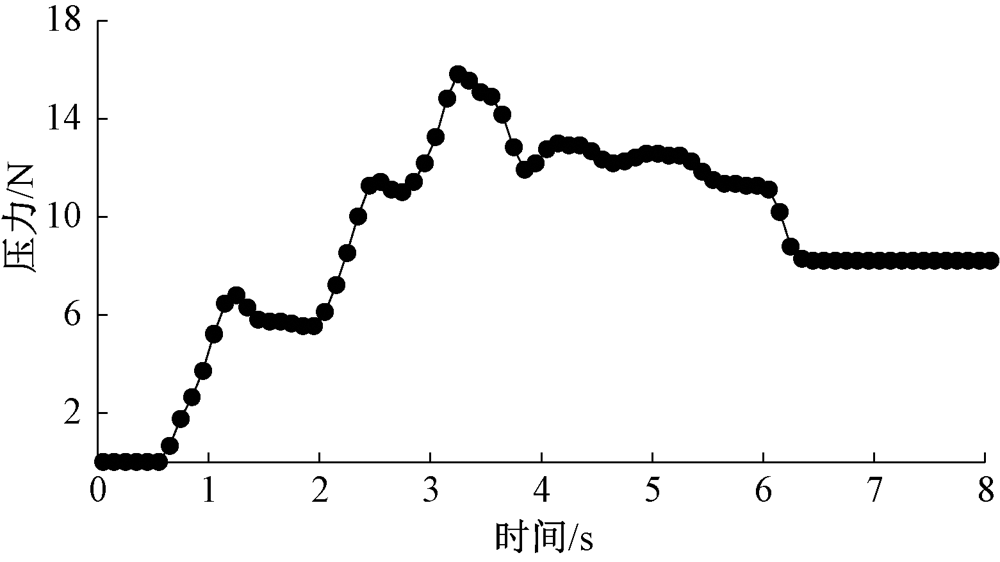
针对服装制造业中柔性面料自动化立体缝纫加工难、加工质量稳定性差的问题,提出了一种适用于柔性面料自动化立体缝纫的随形机械手装置。首先分析了缝纫工艺,设计出一种随形机械手结构;其次对该结构进行位置、速度和加速度,以及机械手工作空间的分析;最后对该机械手结构进行力学分析和验证。结果表明:该结构形式的机械手可对袖口直径范围为200~260 mm的袖片具有自适应性,并可实现基于力反馈控制的自动撑紧功能,不会对面料产生损伤,该机械手还可实现自动调布功能,且单手指调节范围为-12.6~16.8 mm,相对误差为4.34%,最大误差值为0.7 mm,可满足实际的缝纫工艺需求。
中图分类号:
| [1] | KIM M, SUL I H, KIM S. Development of a sewing machine controller for seam pucker reduction using online measurement feedback system[J]. Journal of Engineered Fibers and Fabrics, 2017, 12(2): 67-72. |
| [2] | YOSHIMI T, TAKEZAWA K, HIRAYAMA M. An improvement of trajectory tracking accuracy of automatic sewing robot system by variable gain learning control[J]. IFAC-PapersOnLine, 2018, 51(22): 1-6. |
| [3] | SHUNGO T. Development of fabric feed mechanism using horizontal articulated dual manipulator for automated sewing[C]// 2021 IEEE 17th International Conference on Automation Science and Enginee-ring(CASE).Lyon:IEEE, 2021: 1832-1837. |
| [4] | GUIZZO E. Your next T-shirt will be made by a robot[J]. IEEE Spectrum, 2018, 55(1): 50-57. |
| [5] | SCHRIMPF J. Automated sewing using conveyor belts[C]// 2016 IEEE 21st International Conference on Emerging Technologies and Factory Automation (ETFA). Trondheim:IEEE, 2016: 1-4. |
| [6] | SCHRIMPF J, MATHISEN G. Differential feed control applied to corner matching in automated sewing[C]// 2016 IEEE International Conference on Robotics and Automa-tion (ICRA). Stockholm:IEEE, 2016: 3894-3900. |
| [7] | SCHRIMPF J, WETTERWALD L E. Experiments towards automated sewing with a multi-robot system[C]// 2012 IEEE International Conference on Robotics and Automation(ICRA). Minnesota:IEEE, 2012: 5258-5263. |
| [8] | SCHRIMPF J, BJERKENG M, LIND M, et al. Model-based feed-forward and setpoint generation in a multi-robot sewing cell[C]// 2015 IEEE International Conference on Robotics and Automation (ICRA). Washington:IEEE, 2015: 2027-2033. |
| [9] | SCHRIMPF J, LIND M, MATHISEN G. Real-time analysis of a multi-robot sewing cell[C]// 2013 IEEE International Conference on Industrial Tech-nology(ICIT). Cape Town:IEEE, 2013: 163-168. |
| [10] | SCHRIMPF J, WETTERWALD L E, LIND M. Real-time system integration in a multi-robot sewing cell[C]//2012 IEEE/RSJ International Conference on Intelligent Robots and Systems. Algarve: IEEE, 2012: 2724-2729. |
| [11] |
CHEN X, ZHANG Y, XIE J, et al. Robot needle-punching path planning for complex surface preforms[J]. Robotics and Computer-Integrated Manufacturing, 2018, 52: 24-34.
doi: 10.1016/j.rcim.2018.02.004 |
| [12] | BRIGGS C. Development of an automation platform for fabric manipulation and assembly[D]. Worcester: Worcester Polytechnic Institute, 2020:14-33. |
| [13] | MELLERO P, BIEGAS S, CARVALHO H, et al. Monitoring and control of industrial sewing machines research on thread tension behavior in lockstitch machines[C]// 2017 International Conference on Engineering, Technology and Innovation (ICE/ITMC). Madeira Island:IEEE, 2017: 1031-1036. |
| [14] | TRIANTAFYLLOU D, KOUSTOUMPARDIS P N, ASPRAGATHOS N A. Model reference fuzzy learning force control for robotized sewing[C]// 2011 19th Mediterranean Conference on Control & Automa-tion(MED). Corfu:IEEE, 2011: 1460-1465. |
| [15] |
KOUSTOUMPARDIS P N, ASPRAGATHOS N A. Intelligent hierarchical robot control for sewing fabrics[J]. Robotics and Computer-Integrated Manufacturing, 2014, 30(1):34-46.
doi: 10.1016/j.rcim.2013.08.001 |
| [16] | 王豪清, 童宏拓, 王祝兵, 等. 合成革及皮革与布料间的摩擦系数研究[J]. 中国皮革, 2016(11):4. |
| WANG Haoqing, TONG Hongtuo, WANG Zhubing, et al. Study on friction coefficient of synthetic leather and leather cloth[J]. China Leather, 2016 (11):4. | |
| [17] | 吴济宏, 于伟东. 针织面料的拉伸弹性与服装压[J]. 武汉科技学院学报, 2006, 19(1):21-25. |
| WU Jihong, YU Weidong. Tensile elasticity and clothing pressure of knitted fabrics[J]. Journal of Wuhan University of Science and Technology, 2006, 19(1): 21-25. | |
| [18] | 顾朝晖, 雒少娜. 针织服装面料缝制工艺参数的确定[J]. 纺织学报, 2015, 36(9):94-99. |
|
GU Zhaohui, LUO Shaona. Determination of sewing process parameters of knitted fabric[J]. Journal of Textile Research, 2015, 36 (9): 94-99.
doi: 10.1177/004051756603600113 |
| [1] | 张洁, 徐楚桥, 汪俊亮, 郑小虎. 数据驱动的机器人化纺织生产智能管控系统研究进展[J]. 纺织学报, 2022, 43(09): 1-10. |
| [2] | 毛慧敏, 孙磊, 屠佳佳, 史伟民. 纱线自动接头机关键技术[J]. 纺织学报, 2022, 43(09): 21-26. |
| [3] | 刘锋, 徐杰, 柯文博. 基于深度强化学习的服装缝制过程实时动态调度[J]. 纺织学报, 2022, 43(09): 41-48. |
| [4] | 纪柏林, 王碧佳, 毛志平. 纺织染整领域支撑低碳排放的关键技术[J]. 纺织学报, 2022, 43(01): 113-121. |
| [5] | 杨露, 薛涛, 孟家光, 杨豆豆. 3D打印柔性服装面料的负离子功能整理及其性能[J]. 纺织学报, 2021, 42(08): 102-108. |
| [6] | 杜劲松, 余雅芸, 赵妮, 谢子昂, 费中华, 潘静姝. 不同类型服装企业智能制造能力成熟度评价模型[J]. 纺织学报, 2021, 42(05): 162-167. |
| [7] | 汪松松, 彭来湖, 戴宁, 沈春娅, 胡旭东. 基于工业互联网的针织机械互联互通结构研究[J]. 纺织学报, 2020, 41(01): 165-173. |
| [8] | 周亚勤, 汪俊亮, 鲍劲松, 张洁. 纺织智能制造标准体系架构研究与实现[J]. 纺织学报, 2019, 40(04): 145-151. |
| [9] | 袁汝旺 陈瑞 蒋秀明 周国庆. 碳纤维多层织机打纬机构运动学分析与尺度综合[J]. 纺织学报, 2017, 38(11): 137-142. |
| [10] | 蒋高明 高哲 高梓越. 针织智能制造研究进展[J]. 纺织学报, 2017, 38(10): 178-183. |
| [11] | 梅顺齐 胡贵攀 王建伟 陈振 徐巧. 纺织智能制造及其装备若干关键技术的探讨[J]. 纺织学报, 2017, 38(10): 166-171. |
| [12] | 张洁 吕佑龙 汪俊亮 王海超 . 大数据驱动的纺织智能制造平台架构[J]. 纺织学报, 2017, 38(10): 159-165. |
| [13] | 胡旭东 沈春娅 彭来湖 汝欣. 针织装备的智能制造及互联互通标准验证[J]. 纺织学报, 2017, 38(10): 172-177. |
| [14] | 孙志宏 唐甜鑫 赵伯诚 陈燕婷. 偏心带传动机构的运动学分析及其在并条机中的应用[J]. 纺织学报, 2016, 37(12): 117-122. |
|
||
 京公网安备11010502044800号
京公网安备11010502044800号