纺织学报 ›› 2023, Vol. 44 ›› Issue (04): 194-203.doi: 10.13475/j.fzxb.20211107810
彭来湖1, 罗昌1, 戴宁1,2( ), 胡旭东1, 牛冲3
), 胡旭东1, 牛冲3
PENG Laihu1, LUO Chang1, DAI Ning1,2(), HU Xudong1, NIU Chong3
摘要:
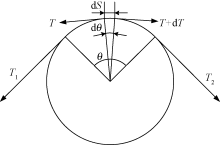
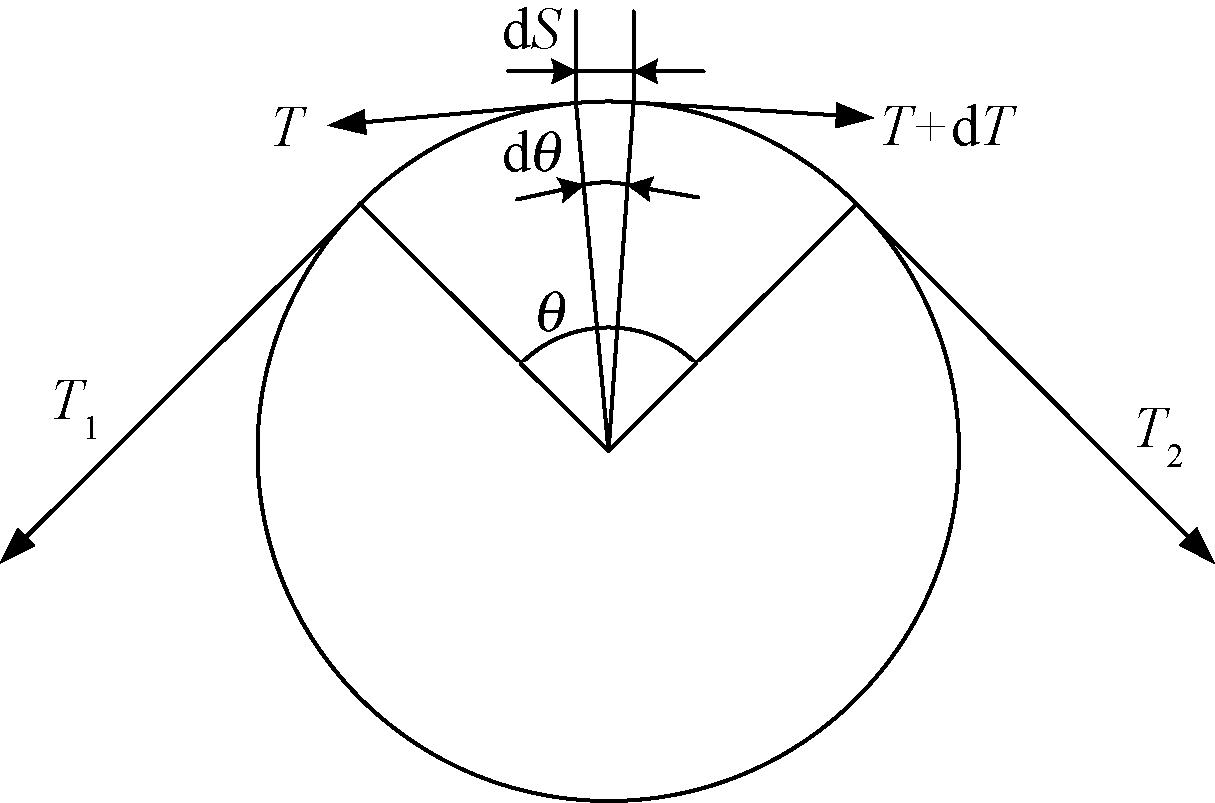
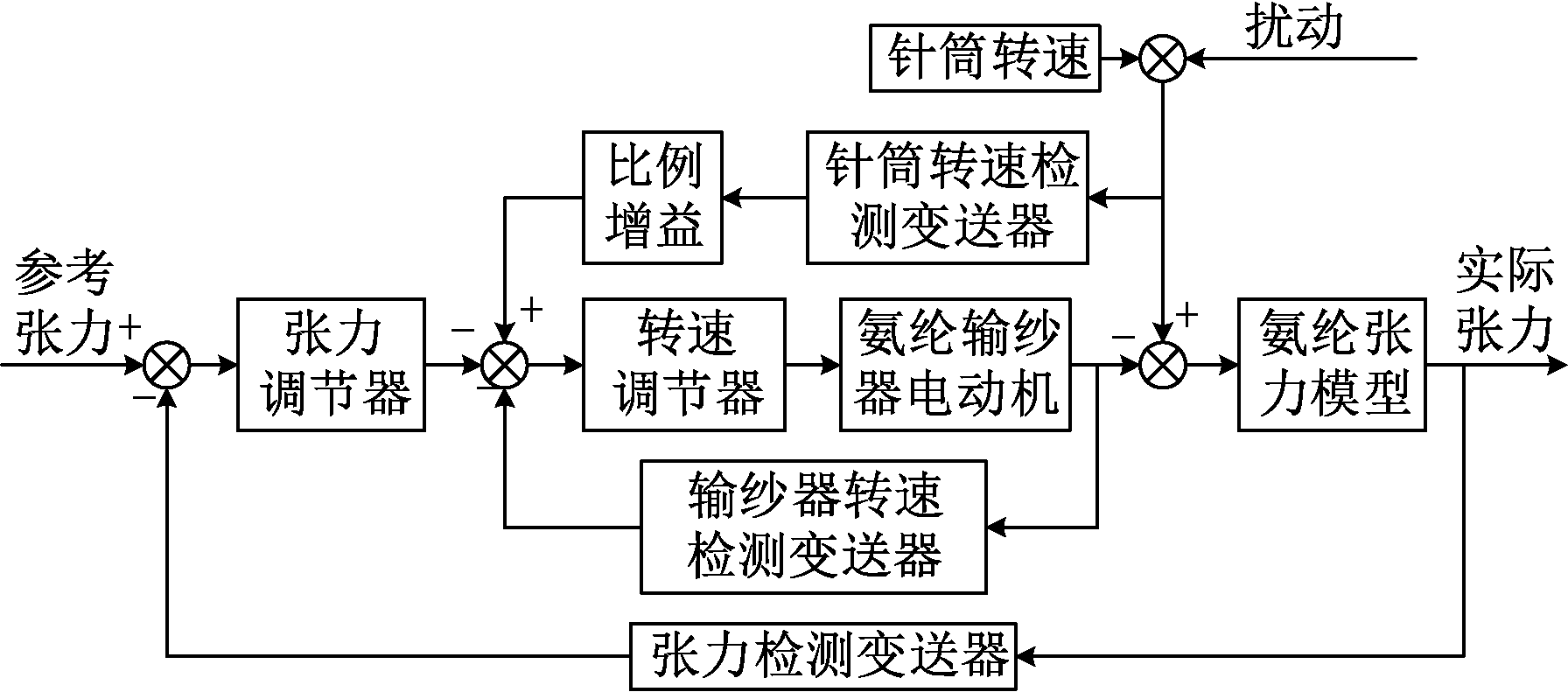
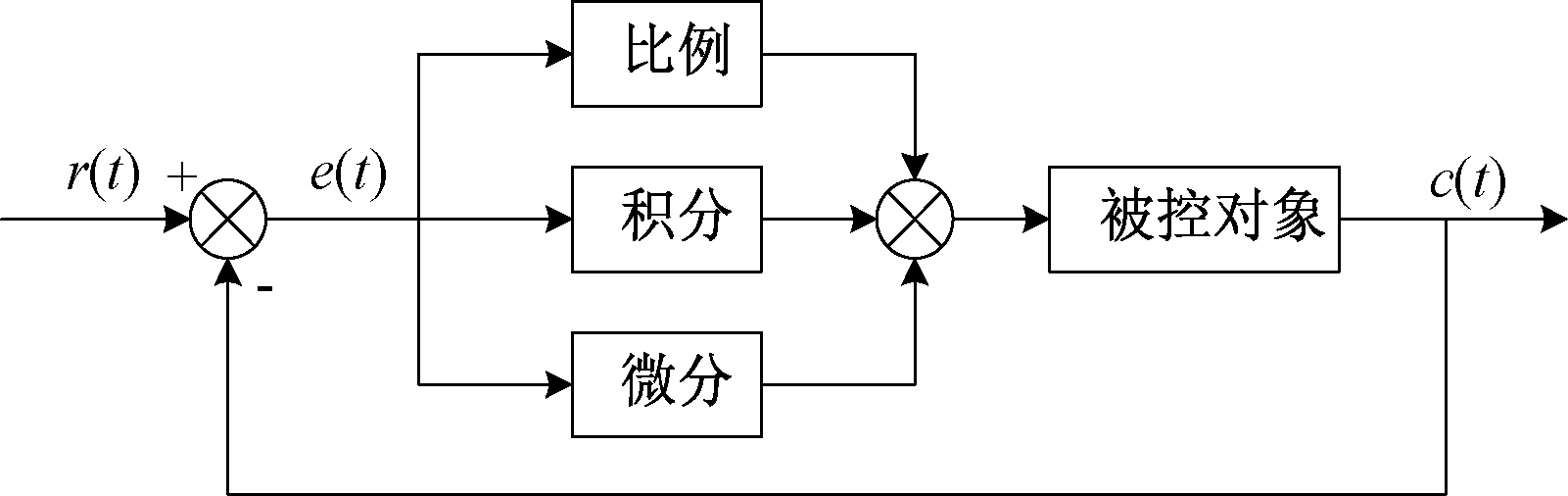
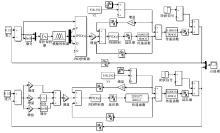
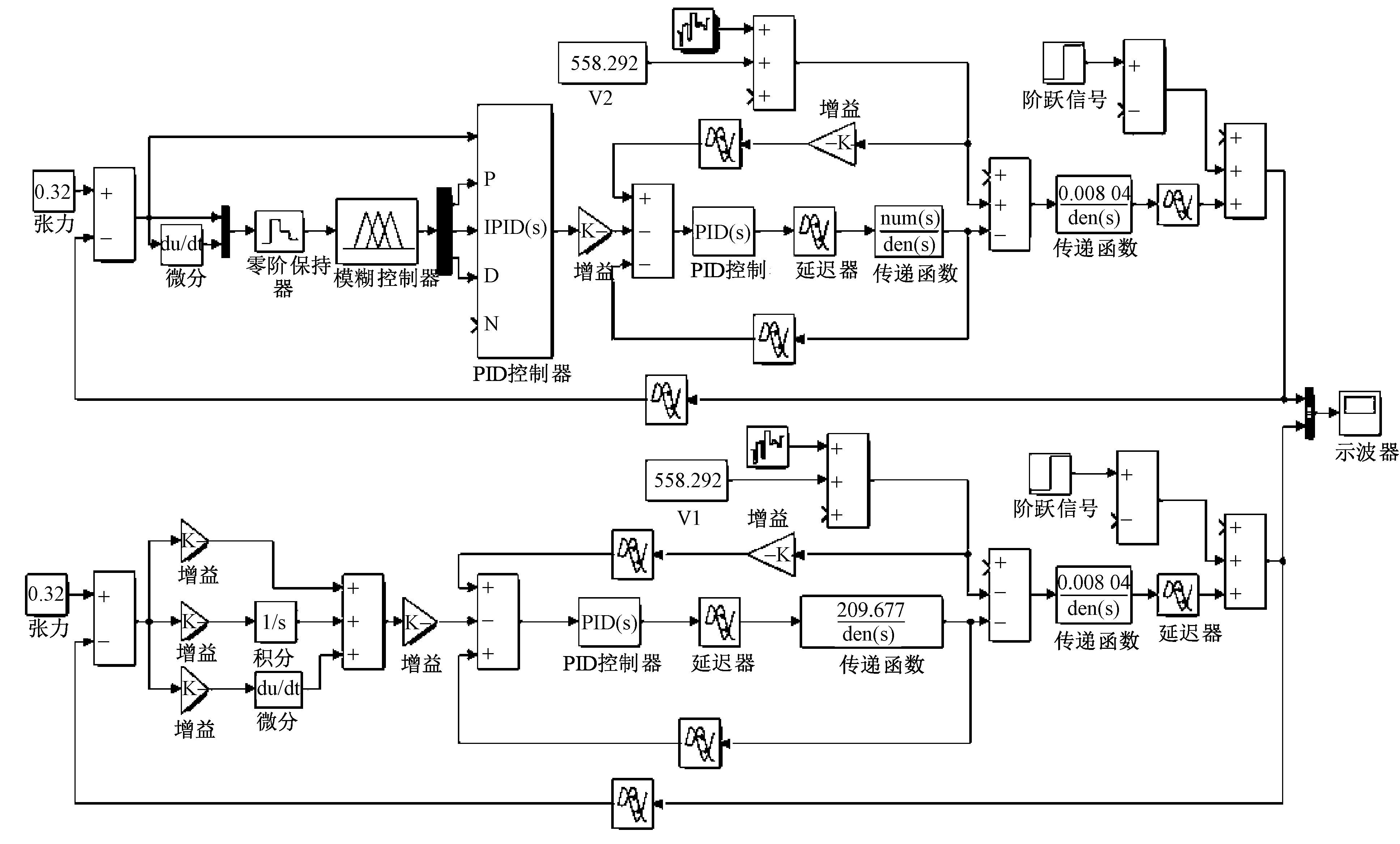
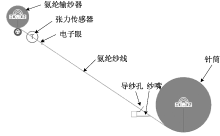
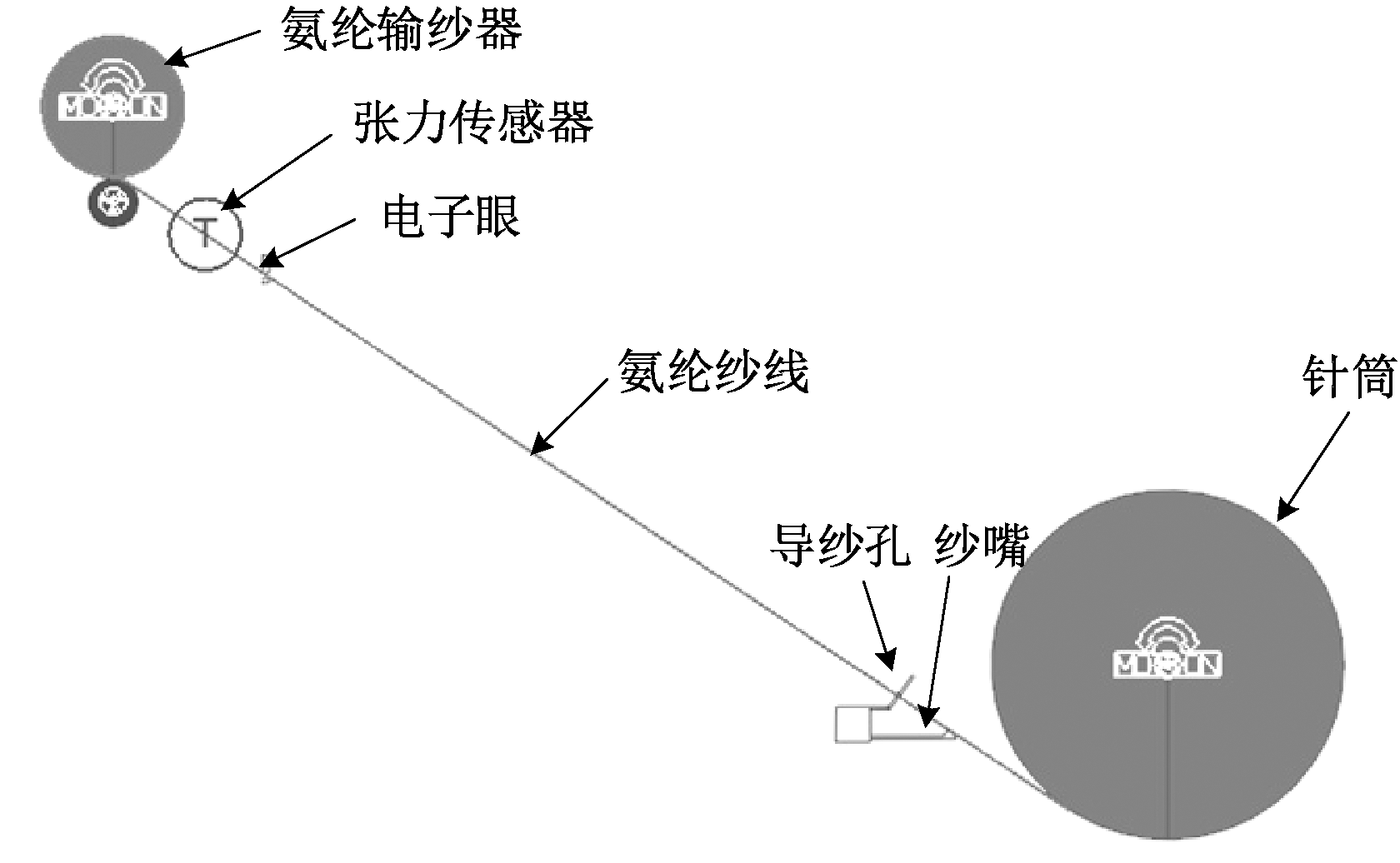
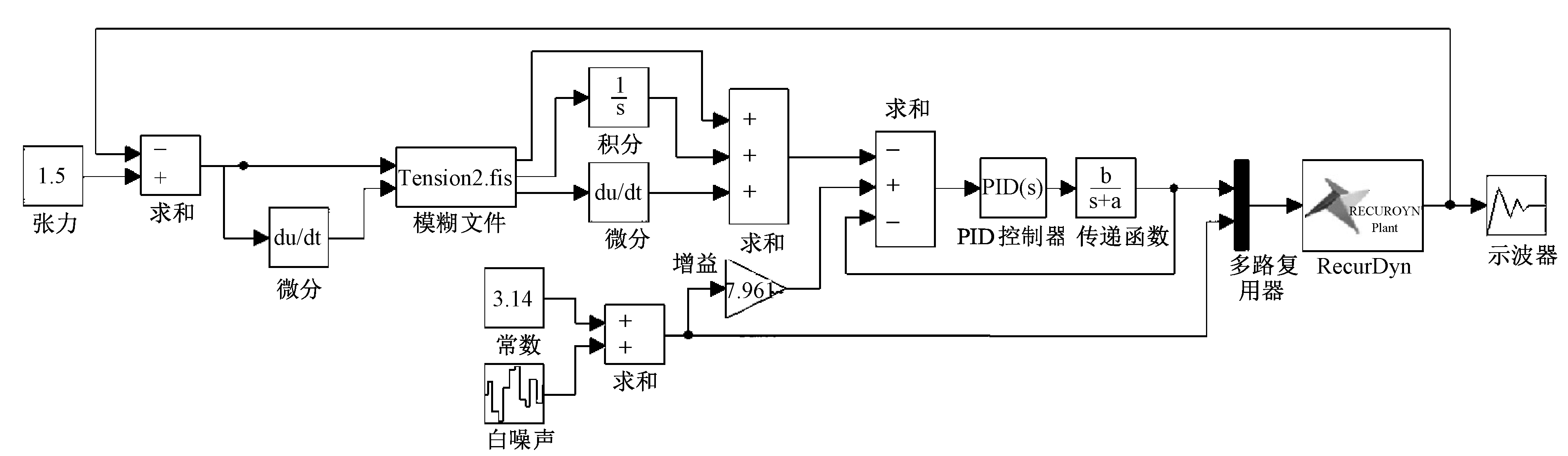
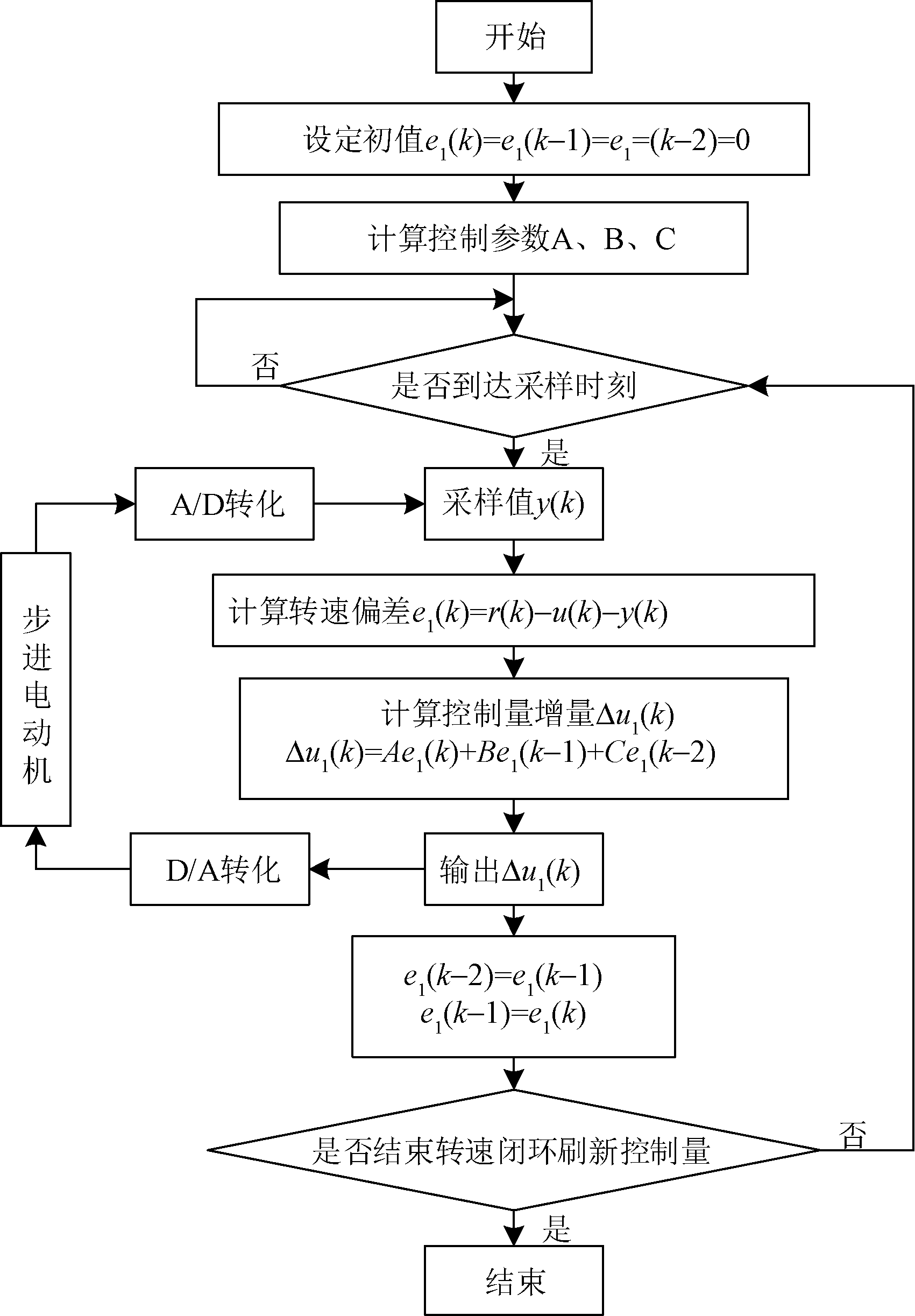
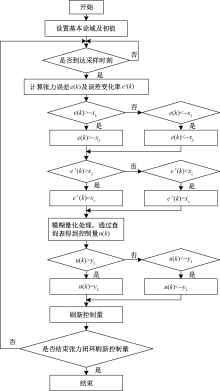
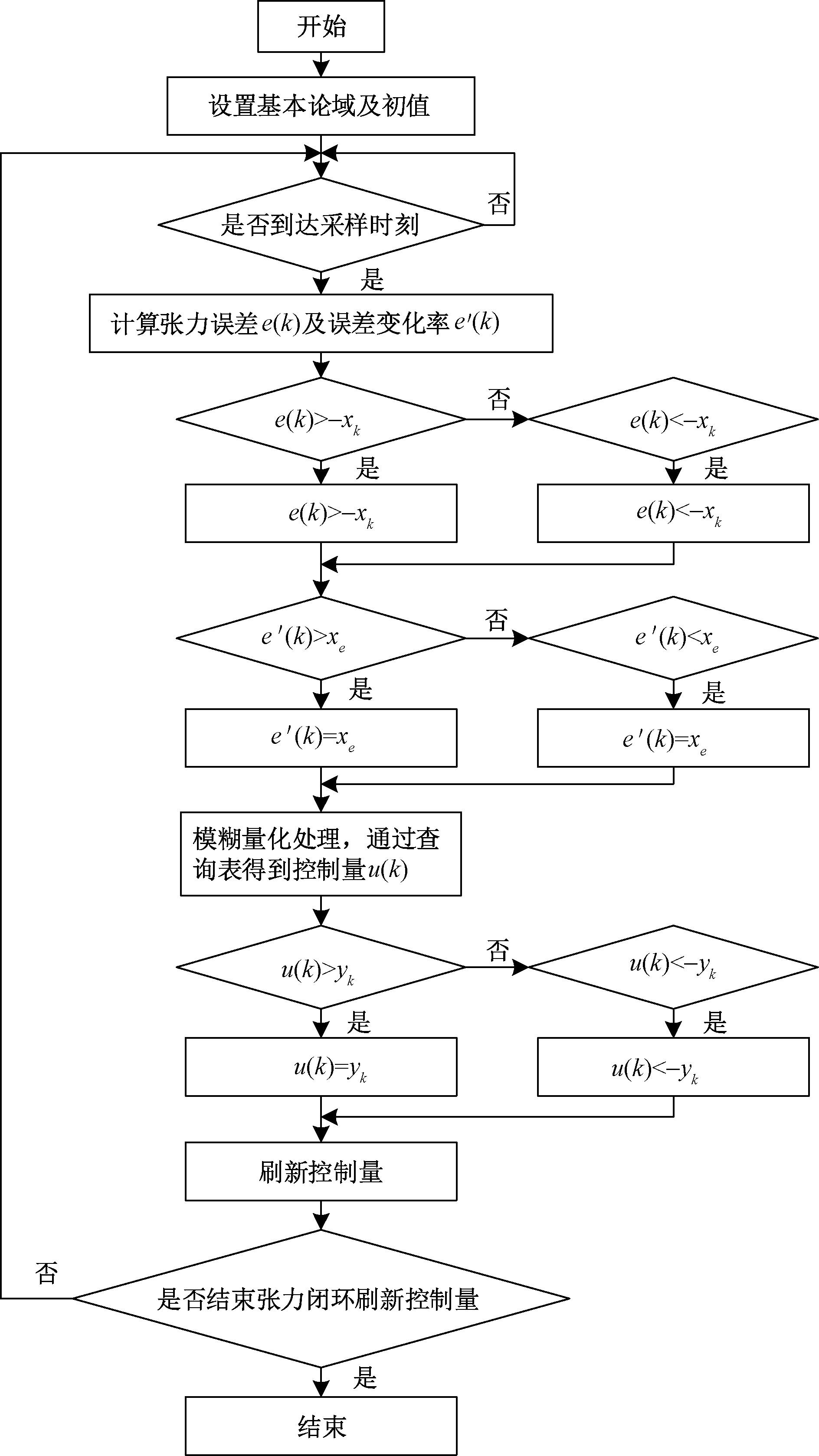
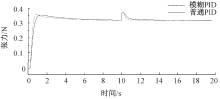
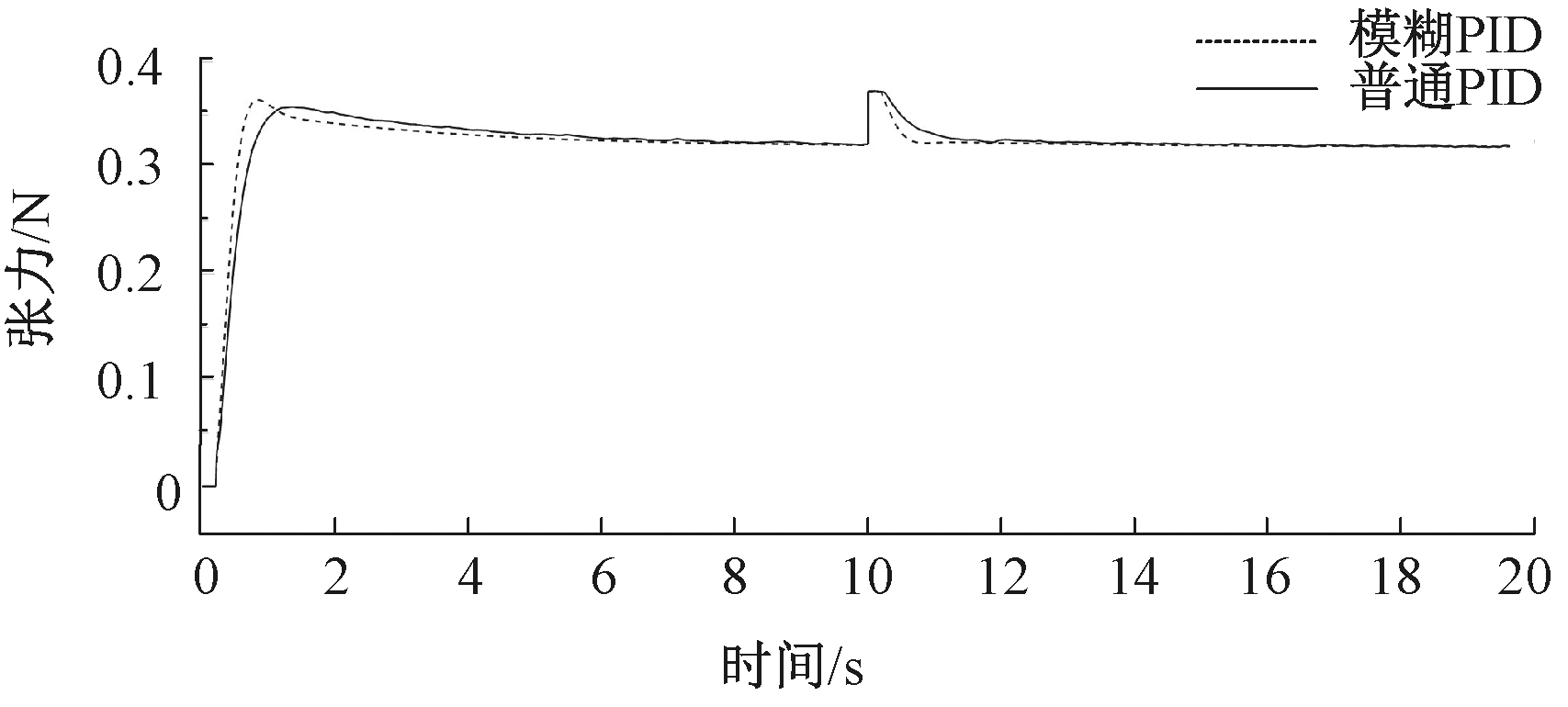
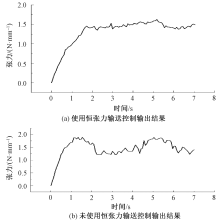
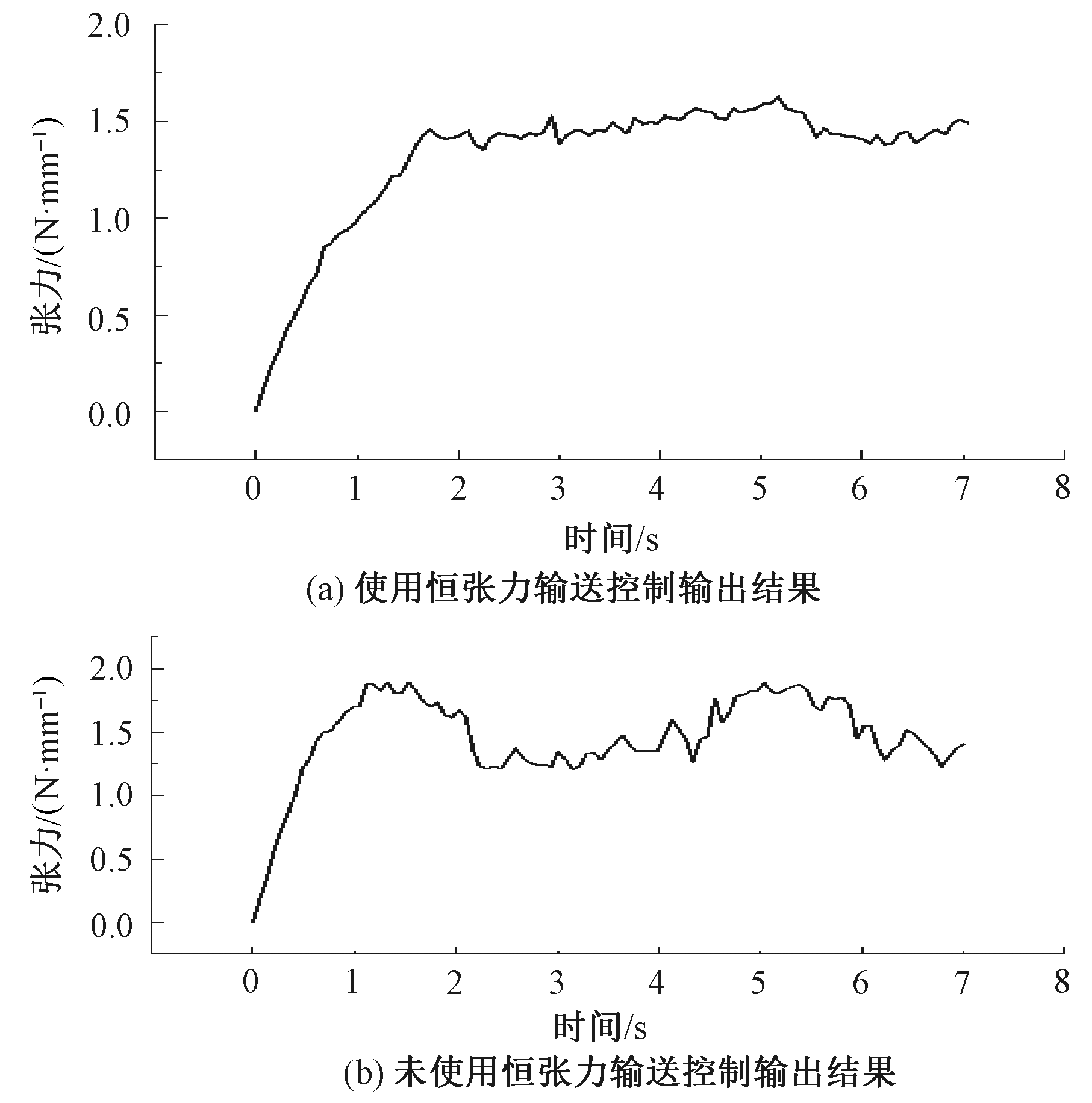
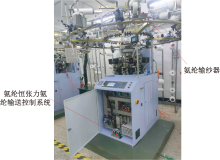
针对针织生产过程中氨纶与导纱嘴摩擦力及编织成圈喂纱量变化导致氨纶输送张力不均匀的问题,深入分析摩擦机制及氨纶输送流程特性,提出了一种基于速度和张力双闭环方式的恒张力氨纶输送控制方案。分析了氨纶输送相关工艺,构建了氨纶张力模型和混合式步进电动机数学模型,提出了张力模糊 PID 控制策略,进行了 Simulink仿真及Recurdyn/Colink 机电联合仿真,阐述了恒张力氨纶输纱控制算法实现。仿真结果表明,采用该控制方案可提高氨纶纱线输送的抗扰动能力、抑制纱线的振动以及减小氨纶输送张力的波动,同时模糊PID进行氨纶张力控制拥有更好的性能,响应时间更快,抗干扰能力更强。实验验证了本控制策略的适应性和优越性,动态恒张力氨纶输送控制方案具有工程应用价值。
中图分类号:
| [1] | 刘立军, 李翔龙. 基于模糊PID控制的薄膜分切机恒张力控制系统[J]. 机械工程与自动化, 2020(6):13-15,18. |
| LIU Lijun, LI Xianglong. Constant tension control system of thin film slitting machine based on fuzzy PID control[J]. Mechanical Engineering & Automation, 2020(6):13-15,18. | |
| [2] | 张保家, 杨涛, 张有信, 等. 基于模糊PID的微细金属丝拉拔张力控制研究[J]. 现代制造工程, 2021(10):107-113. |
| ZHANG Baojia, YANG Tao, ZHANG Youxin, et al. Research on tension control of micro-wire drawing based on fuzzy PID[J]. Modern Manufacturing Engineering, 2021(10):107-113. | |
| [3] | 遠藤善道, 山下典男, 川島義隆. 丸編機の給糸張力と糸速の制御[J]. 繊維機械学会誌, 2009,47. |
| [4] | MATTHES AndrÉ, PUSCH Thomas, CHERIF Chokri, et al. Analysis and simulation of yarn feeding at high dynamic circular knitting machines[J]. Melliand International: Worldwide Textile Journal, 2010, 16(5/6): 220-222. |
| [5] |
BILLMANN L, ISERMANN R. Leak detection methods for pipelines[J]. Automatica, 1987, 23(3):381-385.
doi: 10.1016/0005-1098(87)90011-2 |
| [6] | 顾学东. 基于卡尔曼滤波的张力控制系统研究[D]. 沈阳: 东北大学, 2008:32-37. |
| GU Xuedong. Research on tension control system based on kalman filter[D]. Shenyang: Northeastern University, 2008:32-37. | |
| [7] | 彭翾, 孟婥, 孙以泽. 步进电机基于专家PID的转速控制[J]. 自动化与仪表, 2016, 31(7):54-57. |
| PENG Xuan, MENG Zhuo, SUN Yize. Speed control of stepper motor based on expert PID[J]. Automation & Instrumentation, 2016, 31(7):54-57. | |
| [8] |
陈龙, 吴斌方, 张耀, 等. 基于模糊PID控制的步进驱动系统研究[J]. 组合机床与自动化加工技术, 2020(3): 99-102.
doi: 10.13462/j.cnki.mmtamt.2020.03.023 |
| CHEN Long, WU Binfang, ZHANG Yao, et al. Research on stepping drive system based on fuzzy PID control[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2020(3):99-102. | |
| [9] | 黄月祥. 模糊PID及其在磨床数控系统中的应用综述[C]// 《IT时代周刊》论文专版(第296期). 广州: 广东省电子学会, 2014:5. |
| HUANG Yuexiang. Summary of fuzzy PID and its application in grinding machine numerical control system[C]// IT Times Weekly Special Edition (Issue 296). Guangzhou: Guangdong Electronics Association, 2014:5. | |
| [10] | ALAM S M M, ISLAM S, AKTER S. Reviewing the production process, physical and chemical properties of spandex fibers[J]. Adv Res Text Eng, 2020, 5(2): 1051. |
| [11] |
SANBORN B, SONG B. Poisson's ratio of a hyperelastic foam under quasi-static and dynamic loading[J]. International Journal of Impact Engineering, 2018, 123:48-55.
doi: 10.1016/j.ijimpeng.2018.06.001 |
| [1] | 牛丽, 刘青, 陈超余, 蒋高明, 马丕波. 仿生鳞片针织结构自供能传感织物的制备及其性能[J]. 纺织学报, 2023, 44(02): 135-142. |
| [2] | 宋洁心, 付天宇, 李凤鸣, 宋锐, 李贻斌. 基于延展性的机器人面料缝制张力预测方法[J]. 纺织学报, 2022, 43(12): 173-180. |
| [3] | 蒋高明, 程碧莲, 万爱兰, 李炳贤. 短纤纱经编织物生产关键技术研究进展[J]. 纺织学报, 2022, 43(05): 7-11. |
| [4] | 蒋高明, 周濛濛, 郑宝平, 郑培晓, 刘海桑. 绿色低碳针织技术研究进展[J]. 纺织学报, 2022, 43(01): 67-73. |
| [5] | 彭来湖, 罗昌, 牛冲, 吕永法, 胡旭东, 戴宁. 针织纬编氨纶输送控制技术[J]. 纺织学报, 2021, 42(04): 162-169. |
| [6] | 王盼, 吴志明. 全成形毛衫横向编织方式及其成形工艺[J]. 纺织学报, 2019, 40(10): 73-78. |
| [7] | 彭来湖 吴英刚 王罗俊 胡旭东. 针织圆纬机牵拉张力闭环控制技术[J]. 纺织学报, 2018, 39(10): 125-130. |
| [8] | 蒋高明 高哲. 针织新技术发展现状与趋势[J]. 纺织学报, 2017, 38(12): 169-176. |
| [9] | 罗璇 蒋高明 丛洪莲. 采用局部编织技术的毛衫特殊结构工艺与设计[J]. 纺织学报, 2016, 37(2): 55-60. |
| [10] | 鲁喜 杨建成. 用于碳纤维织物的多层织机经纱张力检测方法[J]. 纺织学报, 2016, 37(07): 137-141. |
| [11] | 姜磊. 卷染机自动控制系统的改造设计[J]. 纺织学报, 2015, 36(03): 121-127. |
| [12] | 楼彦华;孙云云;任军军;郭吉丰. 一种低成本直驱工业平缝机控制系统[J]. 纺织学报, 2009, 30(10): 134-138. |
| [13] | 王红凯;张森林. 基于Linux嵌入式全自动横机软件系统设计[J]. 纺织学报, 2008, 29(2): 101-105. |
| [14] | 杨建成;蒋秀明;周国庆;吴冬凤;何辉. 织机经纱张力Fuzzy-PID控制及其检测方法[J]. 纺织学报, 2008, 29(10): 105-108. |
| [15] | 李革;梅靖;赵匀;潘海鹏. 复贴机张力的模糊自整定PID控制[J]. 纺织学报, 2006, 27(6): 41-43. |
|
||
 京公网安备11010502044800号
京公网安备11010502044800号