纺织学报 ›› 2023, Vol. 44 ›› Issue (11): 105-112.doi: 10.13475/j.fzxb.20220605501
史伟民1( ), 韩思捷1, 屠佳佳1,2, 陆伟健1, 段玉堂1
), 韩思捷1, 屠佳佳1,2, 陆伟健1, 段玉堂1
SHI Weimin1(), HAN Sijie1, TU Jiajia1,2, LU Weijian1, DUAN Yutang1
摘要:
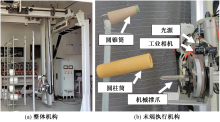
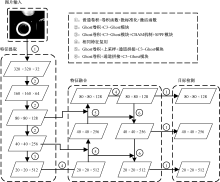
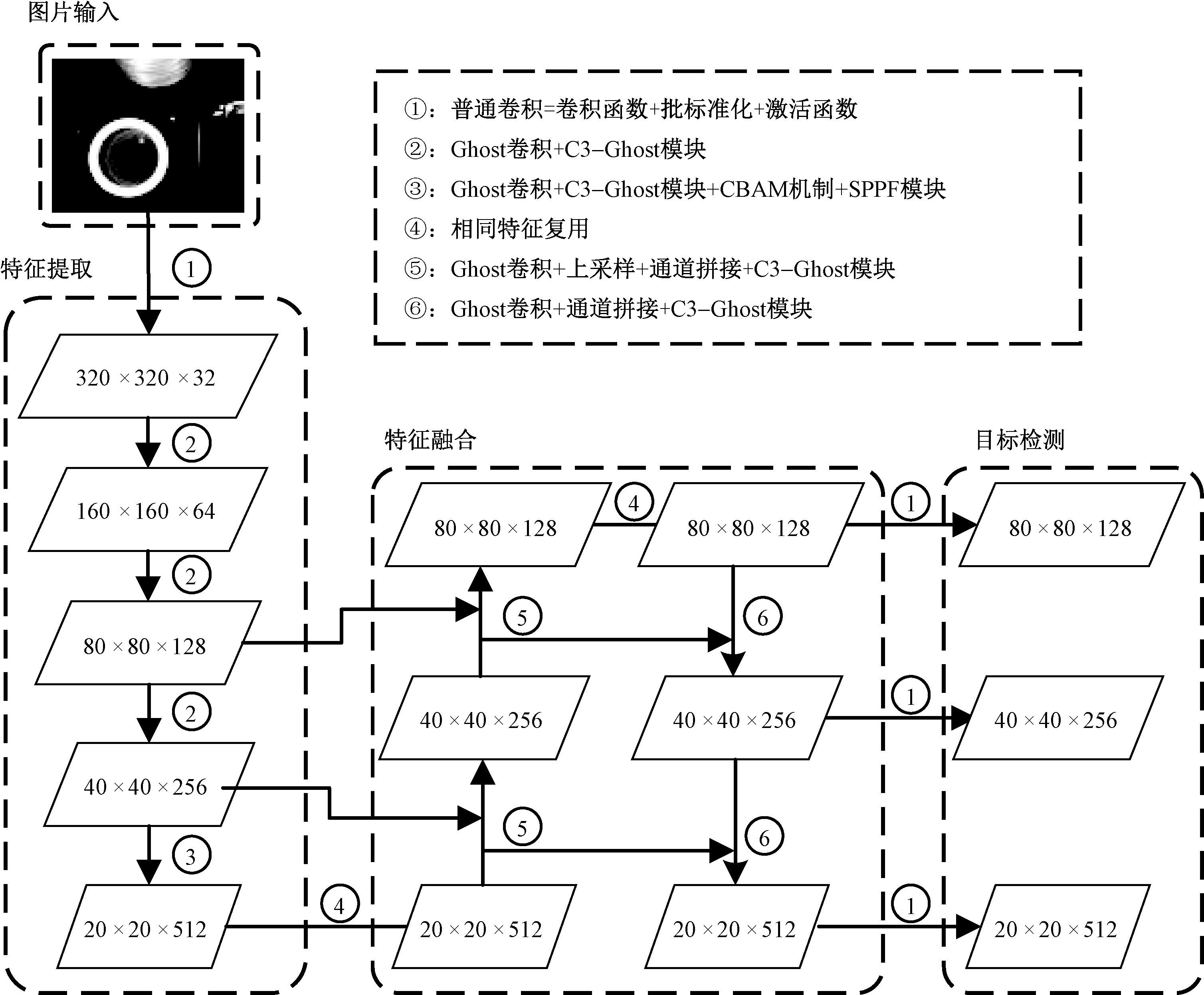
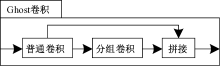
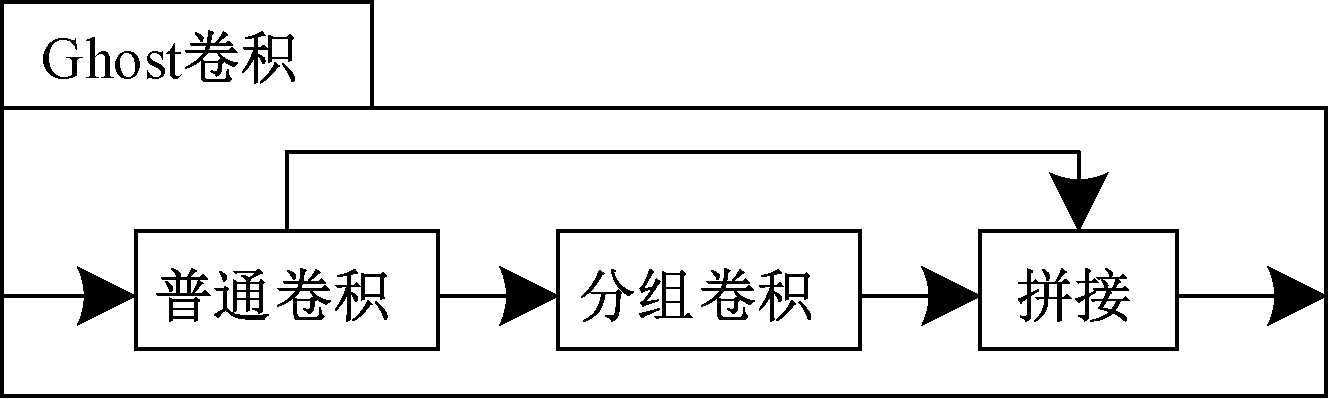
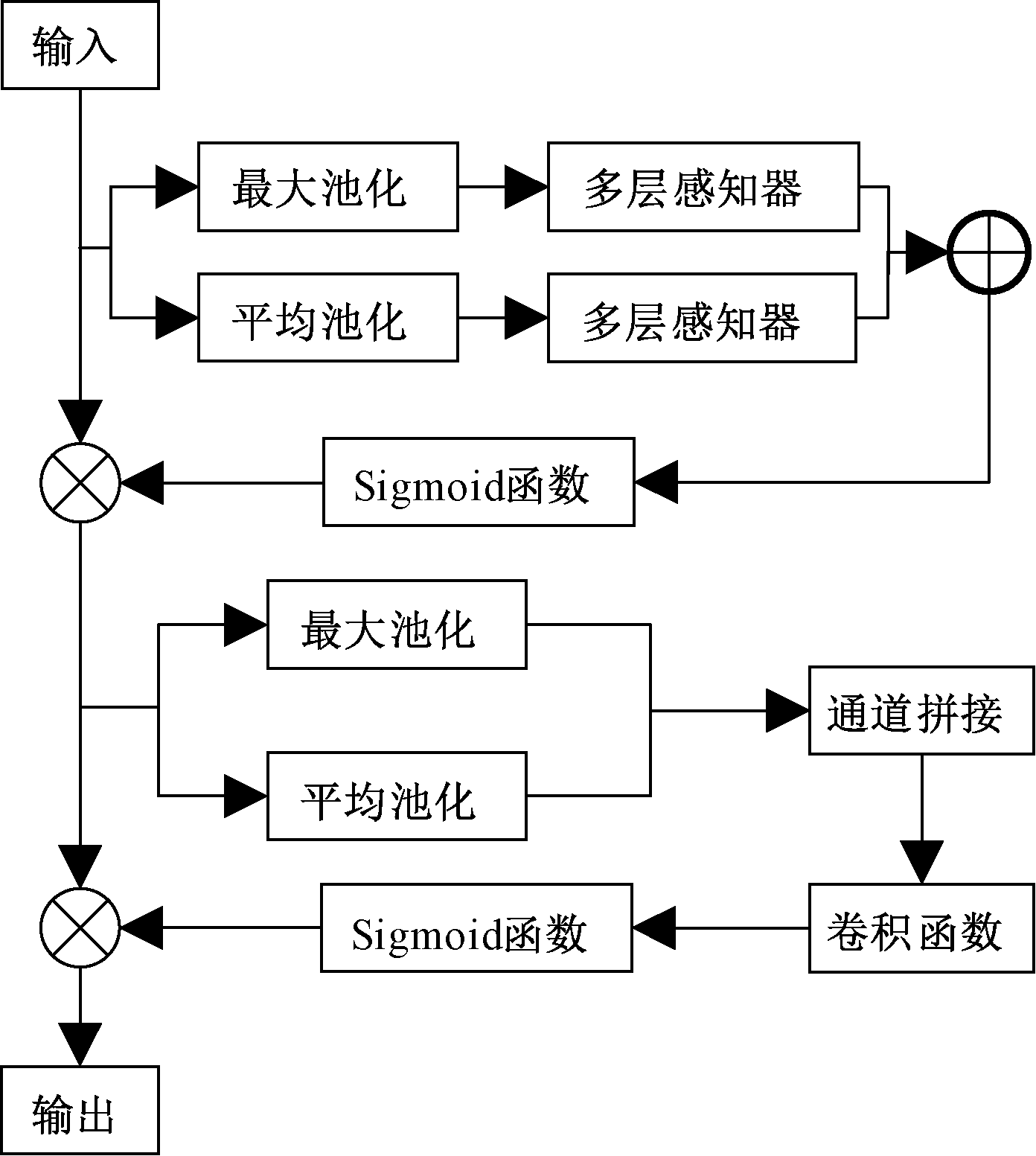
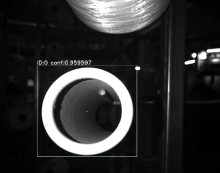
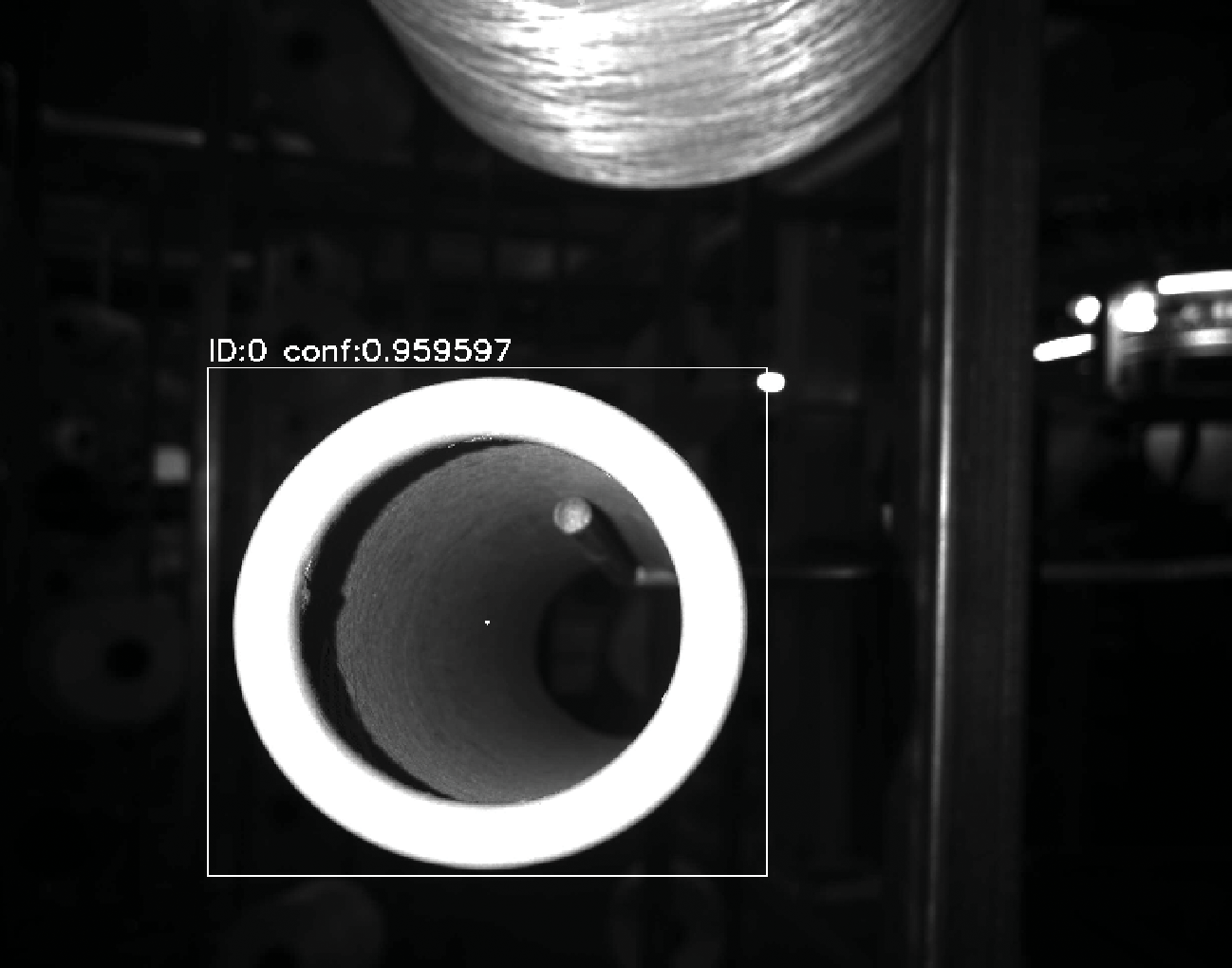
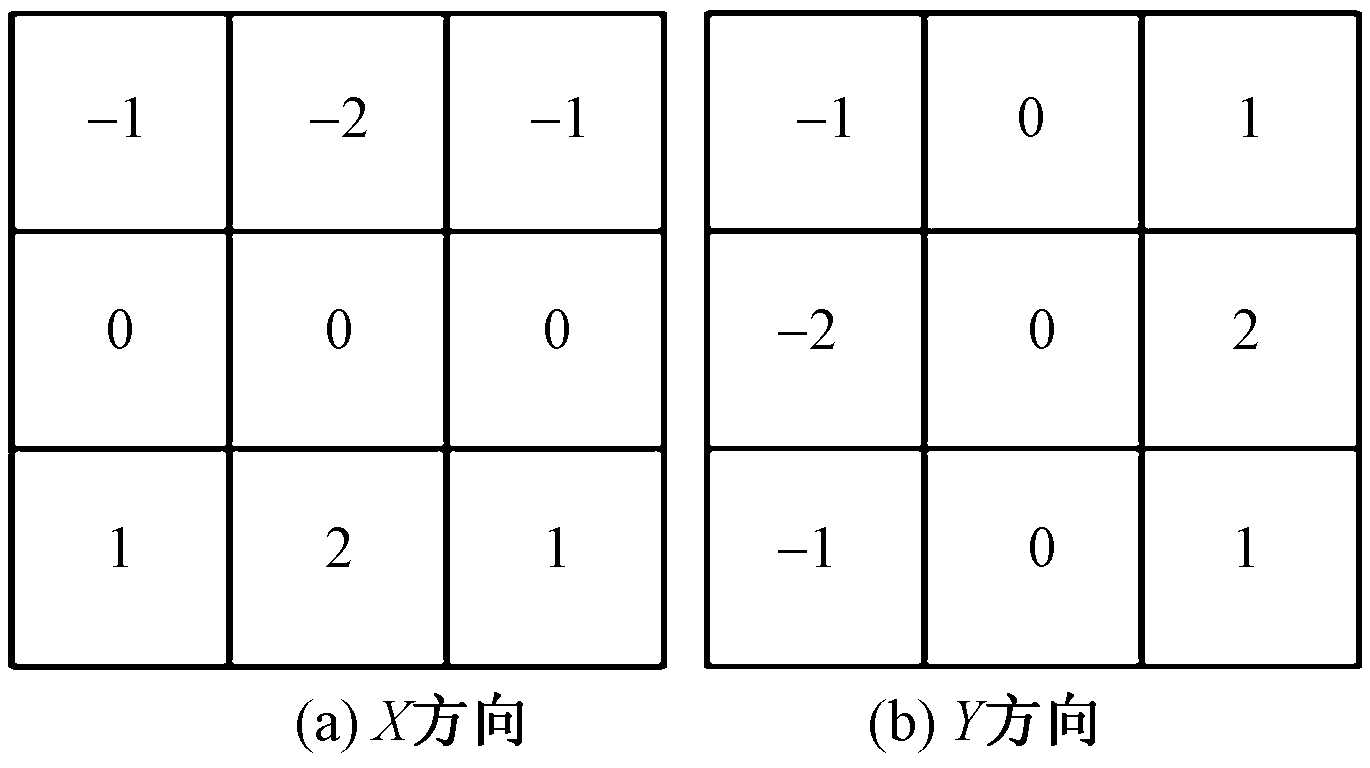
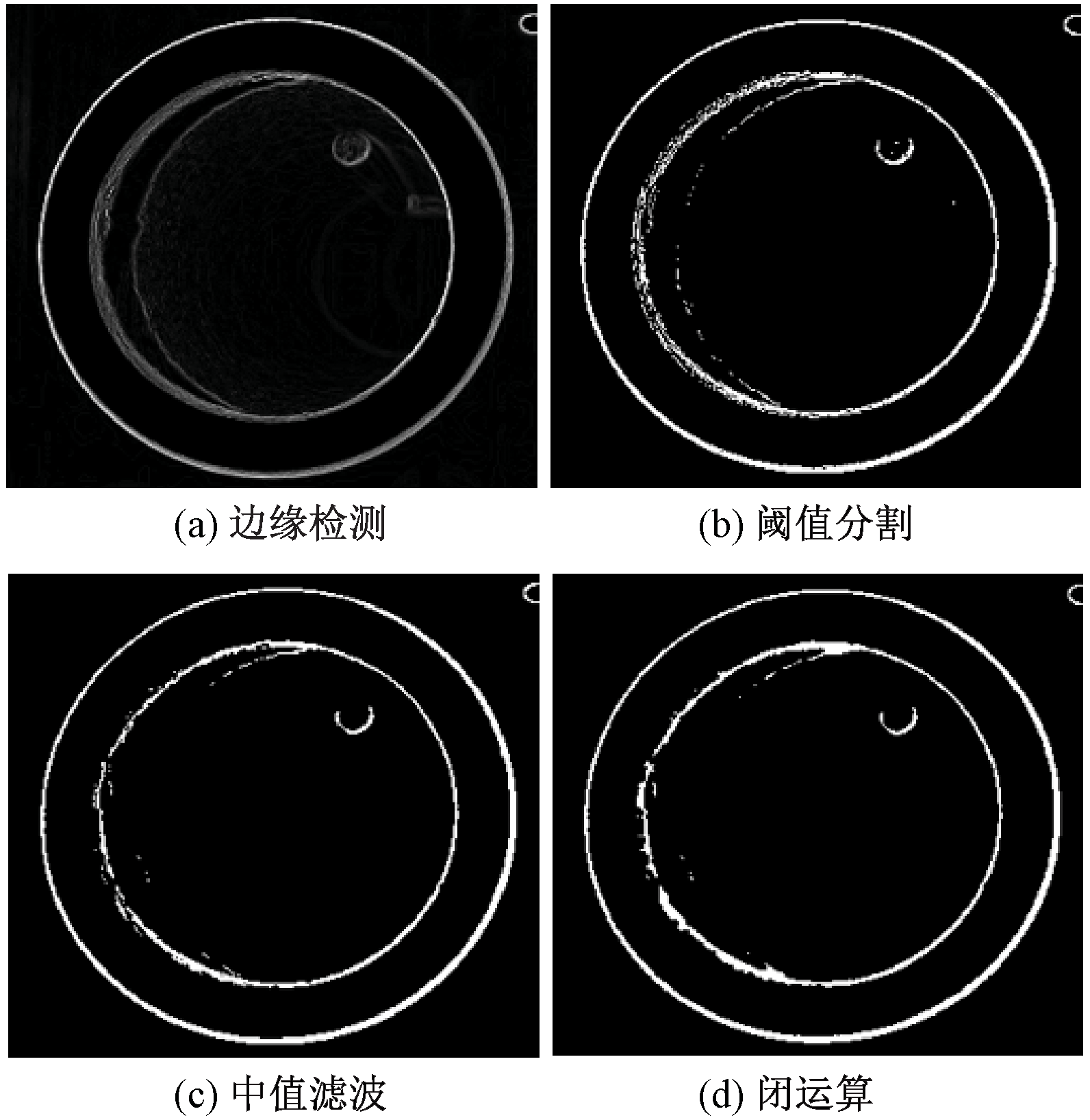
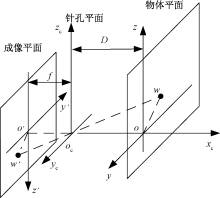
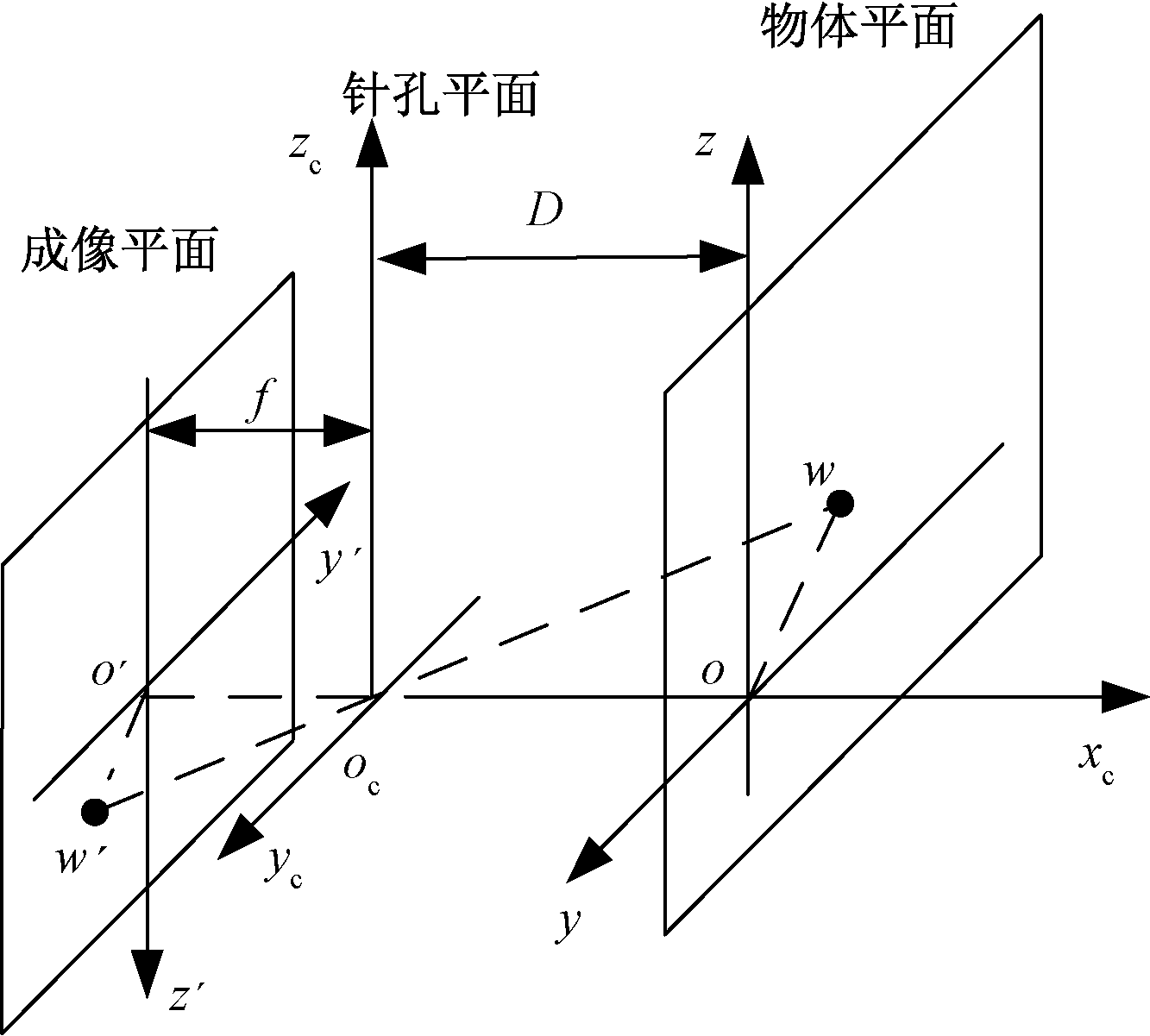
为实现换筒桁架机器人空纱筒口定位功能,提出一种深度学习与传统图像处理相结合的定位方法。首先通过改进的Yolov5模型框定图片中纱筒口的位置;然后利用Sobel边缘检测、阈值分割、滤波、闭操作处理框定区域的图像,并通过最小二乘法拟合得到空筒口径及中心坐标;最后利用单目相机小孔成像原理完成纱筒口的定位。结果表明:改进后的模型在检测准确率上达到99.2%,检测速度可达54.3 帧/s,同时模型参数量减小到3.71 M,X轴、Y轴、Z轴方向的定位误差分别控制在1.3、1.9、0.7 mm以内,本文研究结果可满足换筒桁架机器人空筒口定位功能需求。
中图分类号:
| [1] | 李飞飞. 布匹疵点标记在线检测与含疵样片定位的研究[D]. 郑州: 中原工学院, 2015:1-4. |
| LI Feifei. Research on on-line detection of fabric defect marks and positioning of defective samples[D]. Zhengzhou: Zhongyuan University of Technology, 2015: 1-4. | |
| [2] | 王宁. 智能制造推动我国纺织品贸易比较优势的动态转换[J]. 对外经贸实务, 2021(11):36-41. |
| WANG Ning. Intelligent manufacturing promotes the dynamic transformation of my country's textile trade comparative advantages[J]. Practice in Foreign Economic Relations and Trade, 2021(11): 36-41. | |
| [3] | 张文昌, 单忠德, 卢影. 基于机器视觉的纱笼纱杆快速定位方法[J]. 纺织学报, 2020, 41(12):137-143. |
| ZHANG Wenchang, SHAN Zhongde, LU Ying. Rapid positioning method of sarong yarn rod based on machine vision[J]. Journal of Textile Research, 2020, 41(12):137-143. | |
| [4] | TU J, HAN S, SUN L, et al. The method of creel positioning based on monocular vision[J]. Sensors, 2022.DOI:10.3390/s22176657. |
| [5] | 张建新, 李琦. 基于机器视觉的筒子纱密度在线检测系统[J]. 纺织学报, 2020, 41(6):141-146. |
| ZHANG Jianxin, LI Qi. On-line detection system for cheese density based on machine vision[J]. Journal of Textile Researcgh, 2020, 41(6): 141-146. | |
| [6] | SHI Z, SHI W, WANG J. The detection of thread roll's Margin based on computer vision[J]. Sensors, 2021. DOI: 10.3390/s21196331. |
| [7] | 李靖宇, 沈丹峰, 王玉, 等. 基于参数可调均值迁移滤波实现筒子纱的识别检测[J]. 轻工机械, 2021, 39(3):63-68. |
| LI Jingyu, SHEN Danfeng, WANG Yu, et al. Recognition and detection of cheese yarn based on parameter adjustable mean shift filtering[J]. Light Industry Machinery, 2021, 39(3):63-68. | |
| [8] | 金守峰, 林强强, 马秋瑞. 基于对抗神经网络和神经网络模型的筒子纱抓取方法[J]. 毛纺科技, 2020, 48(1):79-84. |
| JIN Shoufeng, LIN Qiangqiang, MA Qiurui. Cheese grabbing method based on adversarial neural network and neural network model[J]. Wool Textile Journal, 2020, 48(1): 79-84. | |
| [9] | 林清平, 张麒麟, 肖蕾. 采用改进YOLOv5网络的遥感图像目标识别方法[J]. 空军预警学院学报, 2021, 35(2): 117-120. |
| LIN Qingping, ZHANG Qilin, XIAO Lei. Remote sensing image target recognition method using improved YOLOv5 network[J]. Journal of Air Force Early Warning Academy, 2021, 35(2): 117-120. | |
| [10] | HAN K, WANG Y, TIAN Q, et al. GhostNet: more features from cheap operations[C] // IEEE/CVF Conference on Computer Vision and Pattern Recogni-tion (CVPR). Seattle:IEEE, 2020: 1577-1586. |
| [11] | WOO S, PARK J, LEE J Y, et al. CBAM: convolutional block attention module[C]// Proceedings of the European Conference on Computer Vision (ECCV). Berlin: Springer Press, 2018: 3-19. |
| [12] | 丛玉华, 何啸, 朱惠娟, 等. 基于改进Yolov4-Tiny网络的安全帽监测系统[J]. 电子技术与软件工程, 2021(19): 121-124. |
| CONG Yuhua, HE Xiao, ZHU Huijuan, et al. Safety helmet monitoring system based on improved Yolov4-Tiny network[J]. Electronic Technology and Software Engineering, 2021(19): 121-124. | |
| [13] | 闫坤. 基于PSD与单目视觉的激光跟踪姿态测量方法研究[D]. 武汉: 湖北工业大学, 2020: 26-28. |
| YAN Kun. Research on attitude measurement method of laser tracking based on PSD and monocular vision[D]. Wuhan: Hubei University of Technology, 2020: 26-28. | |
| [14] | 宇文亮. 基于Kinect的物体模型建立及识别定位技术研究[D]. 哈尔滨: 哈尔滨工业大学, 2018: 14-16. |
| YU Wenliang. Research on object model establishment and recognition and positioning technology based on Kinect[D]. Harbin: Harbin Institute of Technology, 2018: 14-16. |
| [1] | 陆伟健, 屠佳佳, 王俊茹, 韩思捷, 史伟民. 基于改进残差网络的空纱筒识别模型[J]. 纺织学报, 2024, 45(01): 194-202. |
| [2] | 孙磊, 屠佳佳, 毛慧敏, 王俊茹, 史伟民. 针织智能车间自动换筒任务调度技术[J]. 纺织学报, 2023, 44(12): 189-196. |
| [3] | 陈罡, 金贵阳, 吴菁, 罗千. 智能服装缝制关键技术及成套装备研发[J]. 纺织学报, 2023, 44(08): 197-204. |
| [4] | 陈泰芳, 周亚勤, 汪俊亮, 徐楚桥, 李冬武. 基于视觉特征强化的环锭纺细纱断头在线检测方法[J]. 纺织学报, 2023, 44(08): 63-72. |
| [5] | 纪越, 潘东, 马杰东, 宋丽梅, 董九志. 基于机器视觉的弦振动纱线张力非接触检测系统[J]. 纺织学报, 2023, 44(05): 198-204. |
| [6] | 陶静, 汪俊亮, 徐楚桥, 张洁. 基于视觉校准的环锭纺细纱条干特征在线提取方法[J]. 纺织学报, 2023, 44(04): 70-77. |
| [7] | 王斌, 李敏, 雷承霖, 何儒汉. 基于深度学习的织物疵点检测研究进展[J]. 纺织学报, 2023, 44(01): 219-227. |
| [8] | 陈金广, 李雪, 邵景峰, 马丽丽. 改进YOLOv5网络的轻量级服装目标检测方法[J]. 纺织学报, 2022, 43(10): 155-160. |
| [9] | 屠佳佳, 孙磊, 毛慧敏, 戴宁, 朱婉珍, 史伟民. 圆纬机纱架自动换筒技术[J]. 纺织学报, 2022, 43(07): 178-185. |
| [10] | 金守峰, 侯一泽, 焦航, 张鹏, 李宇涛. 基于改进AlexNet模型的抓毛织物质量检测方法[J]. 纺织学报, 2022, 43(06): 133-139. |
| [11] | 周其洪, 彭轶, 岑均豪, 周申华, 李姝佳. 基于机器视觉的细纱接头机器人纱线断头定位方法[J]. 纺织学报, 2022, 43(05): 163-169. |
| [12] | 吕文涛, 林琪琪, 钟佳莹, 王成群, 徐伟强. 面向织物疵点检测的图像处理技术研究进展[J]. 纺织学报, 2021, 42(11): 197-206. |
| [13] | 吴柳波, 李新荣, 杜金丽. 基于轮廓提取的缝纫机器人运动轨迹规划研究进展[J]. 纺织学报, 2021, 42(04): 191-200. |
| [14] | 田宇航, 王绍宗, 张文昌, 张倩. 基于机器视觉的单组分染液浓度快速检测方法[J]. 纺织学报, 2021, 42(03): 115-121. |
| [15] | 冯文倩, 李新荣, 杨帅. 人体轮廓机器视觉检测算法的研究进展[J]. 纺织学报, 2021, 42(03): 190-196. |
|
||
 京公网安备11010502044800号
京公网安备11010502044800号