纺织学报 ›› 2024, Vol. 45 ›› Issue (01): 1-11.doi: 10.13475/j.fzxb.20231202801
• 特约论文 • 下一篇
许高平, 孙以泽( )
)
XU Gaoping, SUN Yize()
摘要:
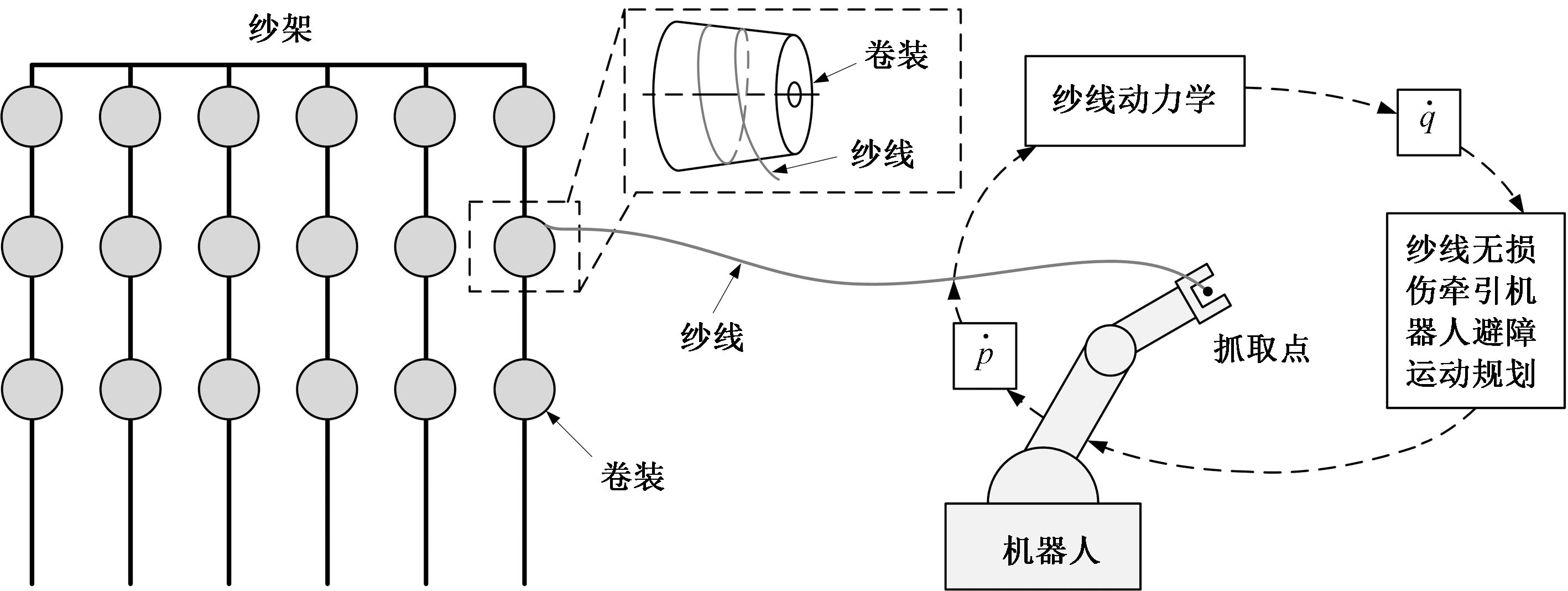
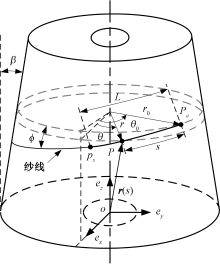
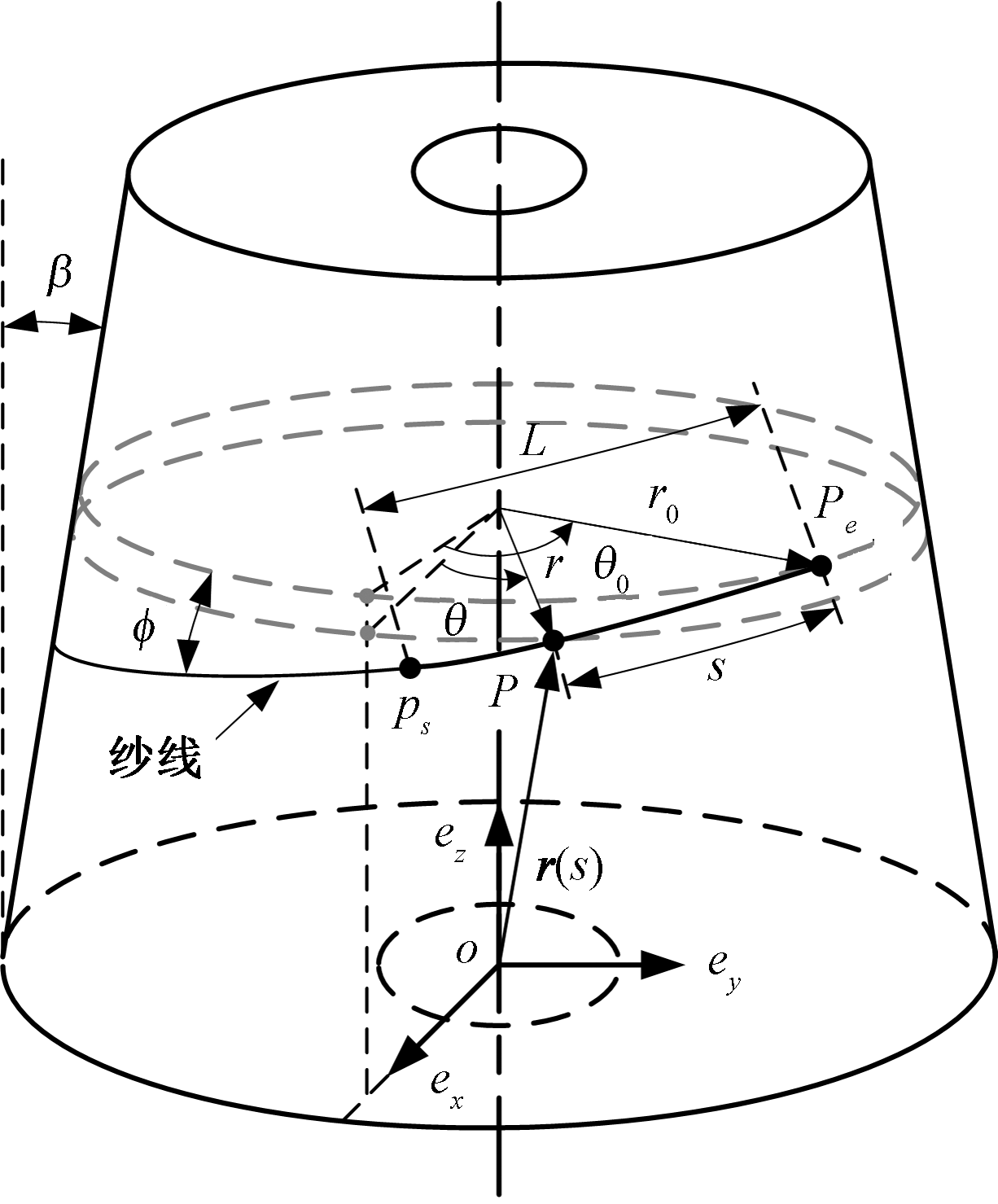
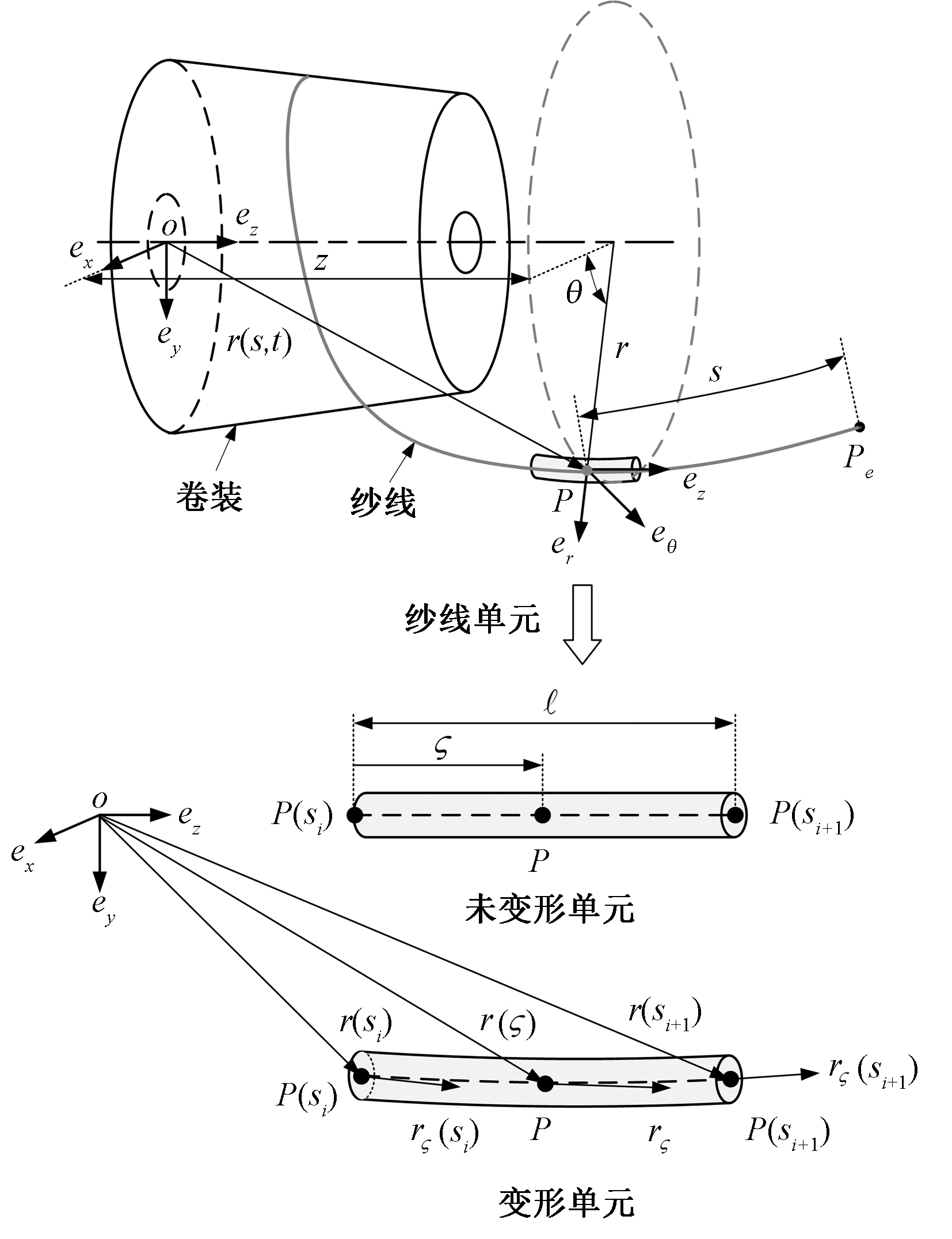
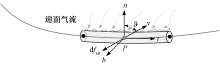
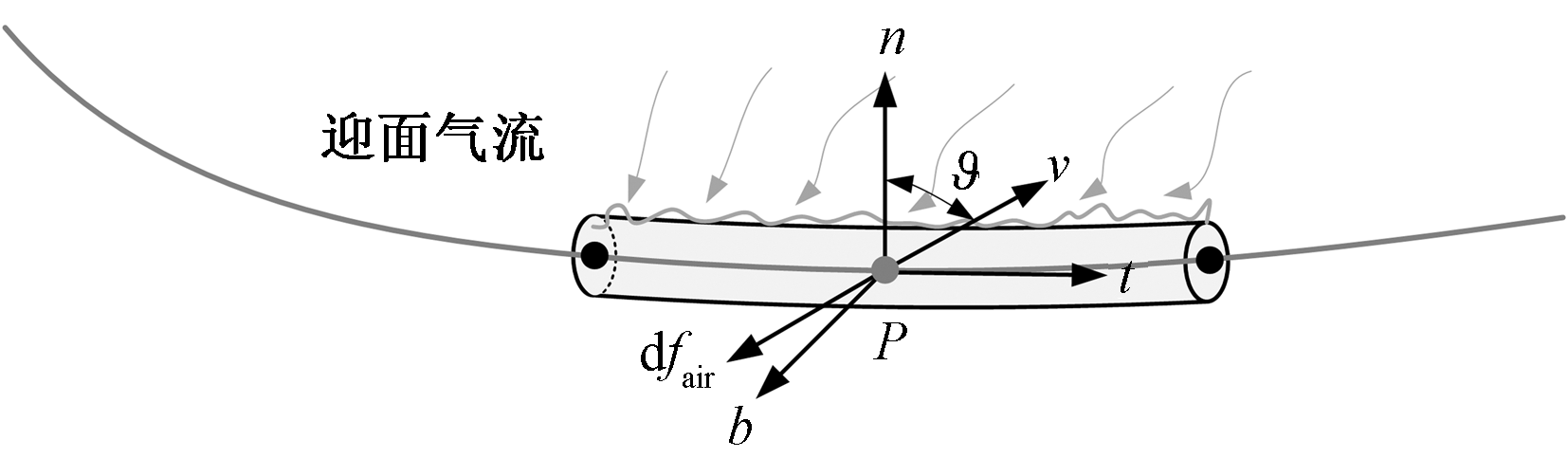
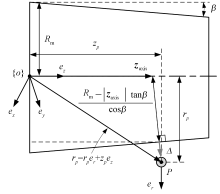
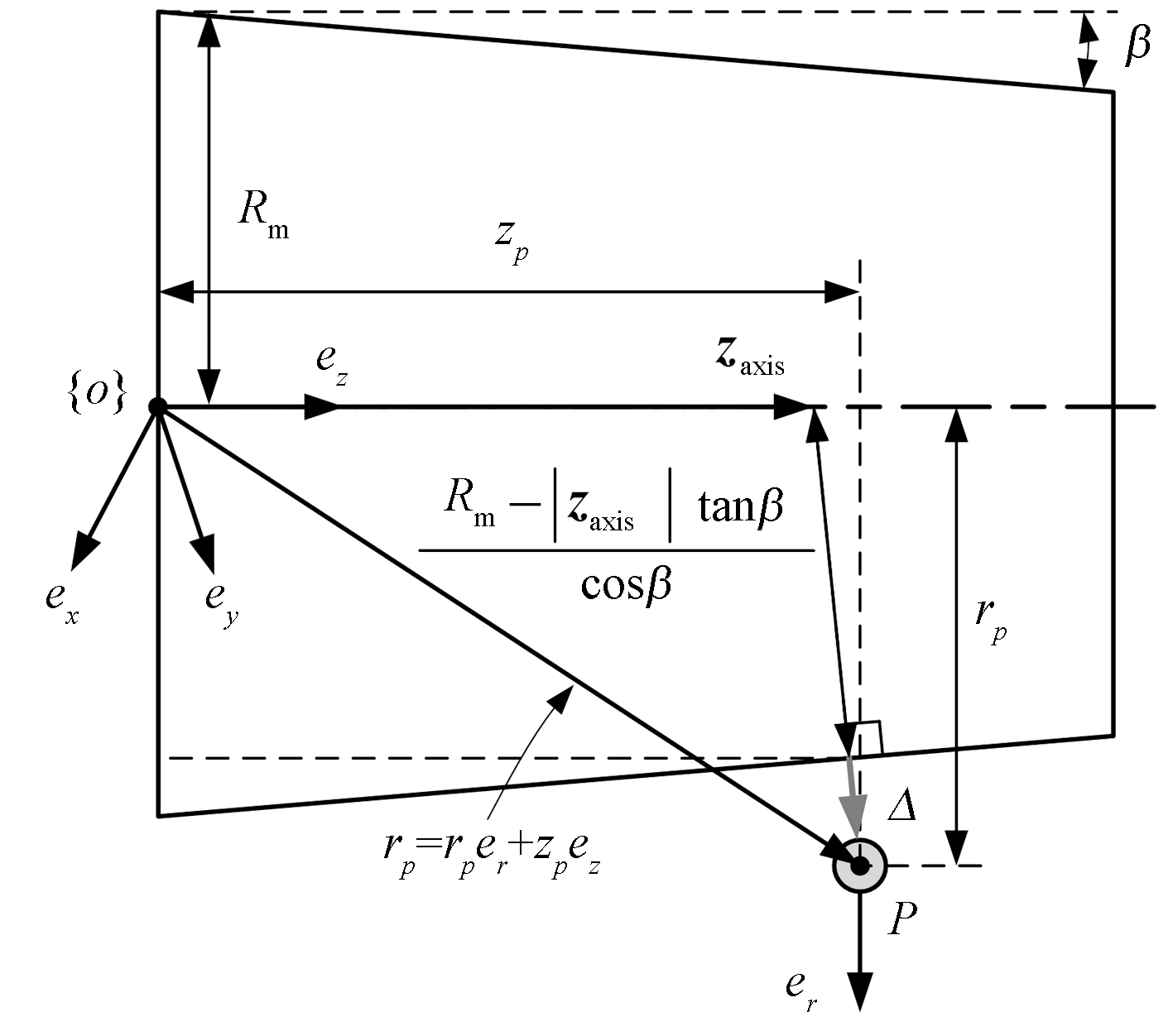
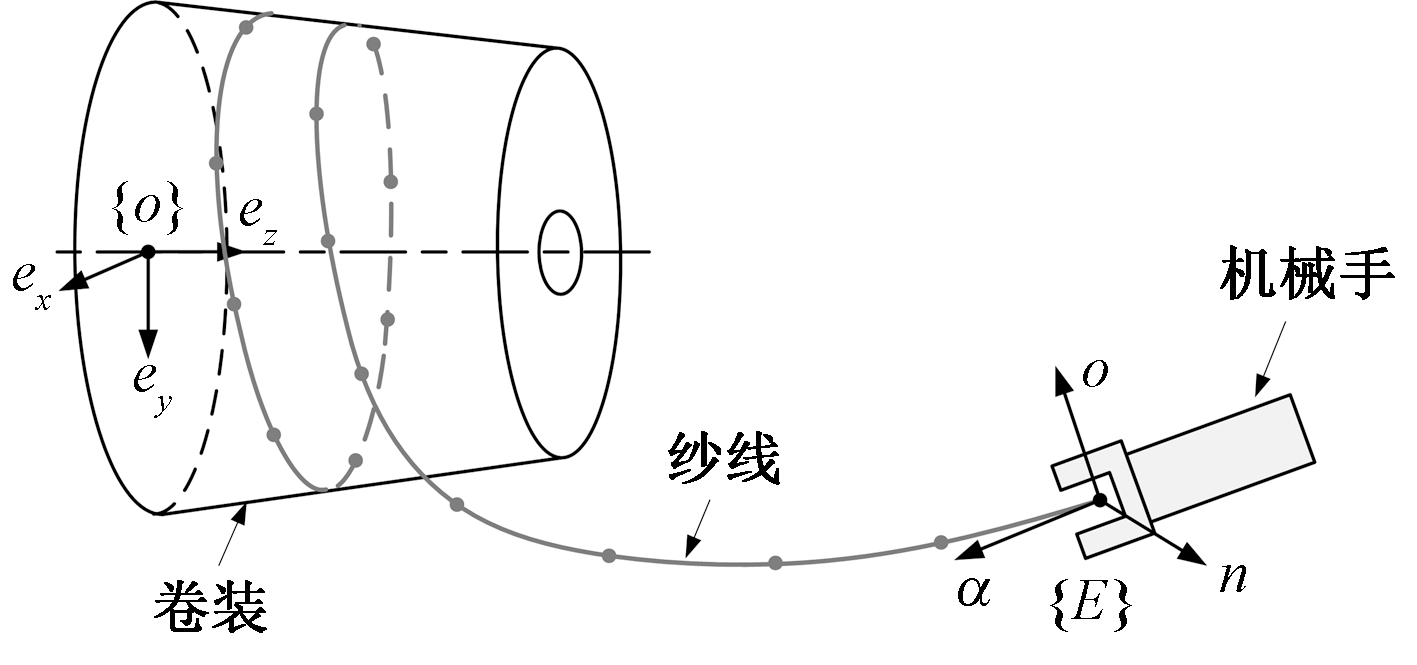
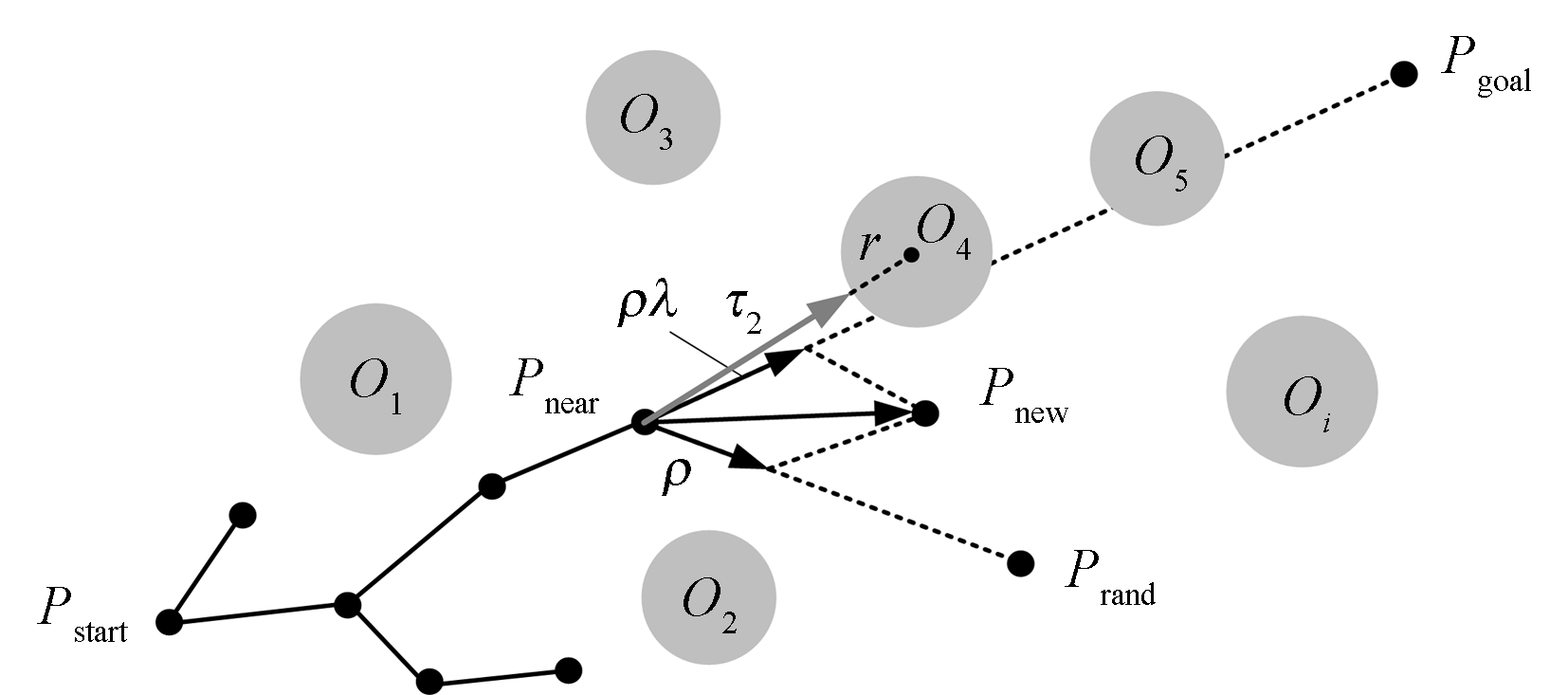
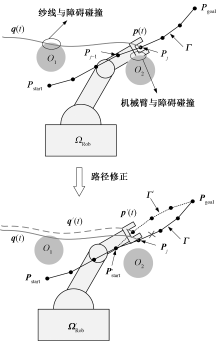
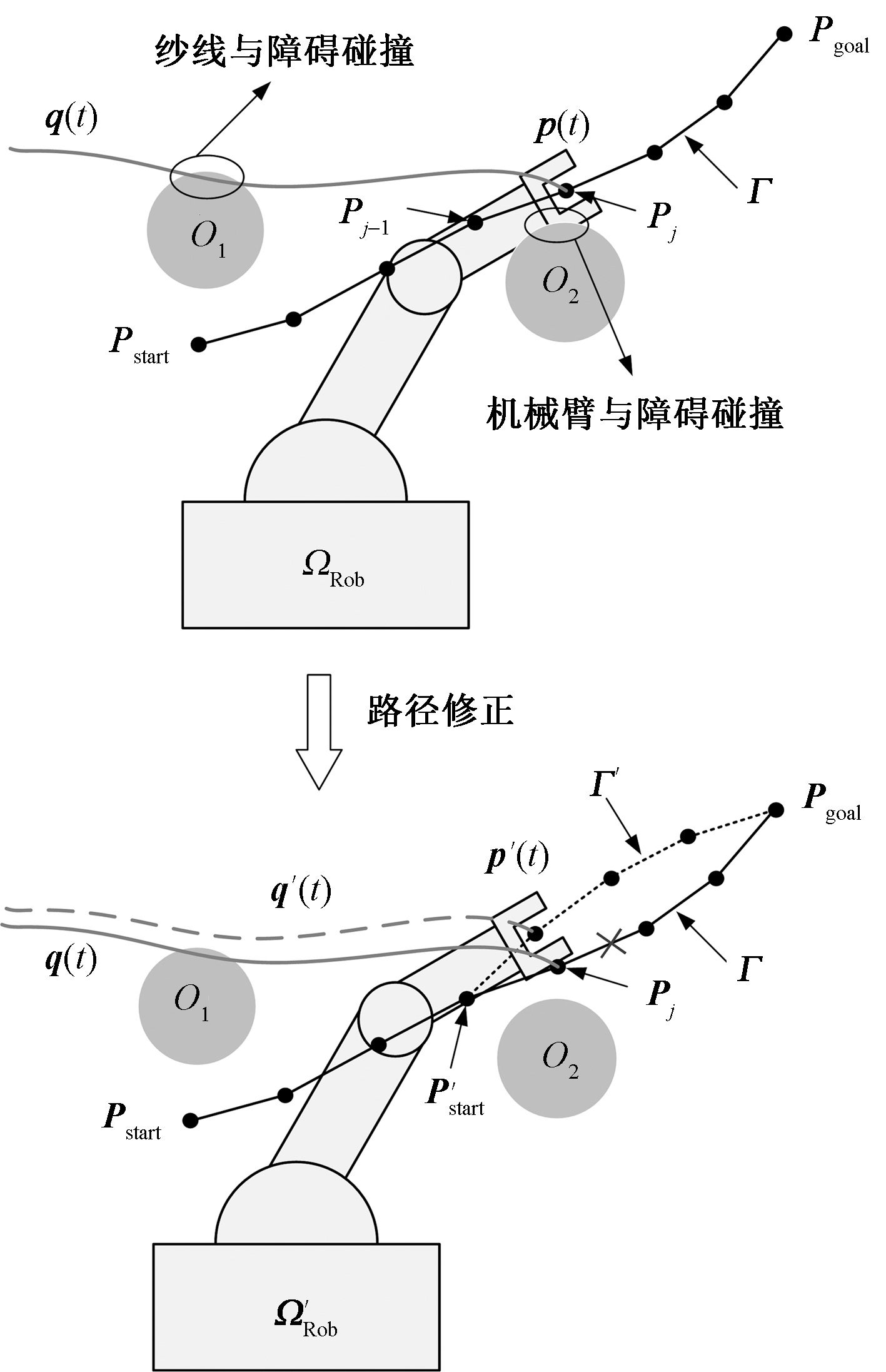
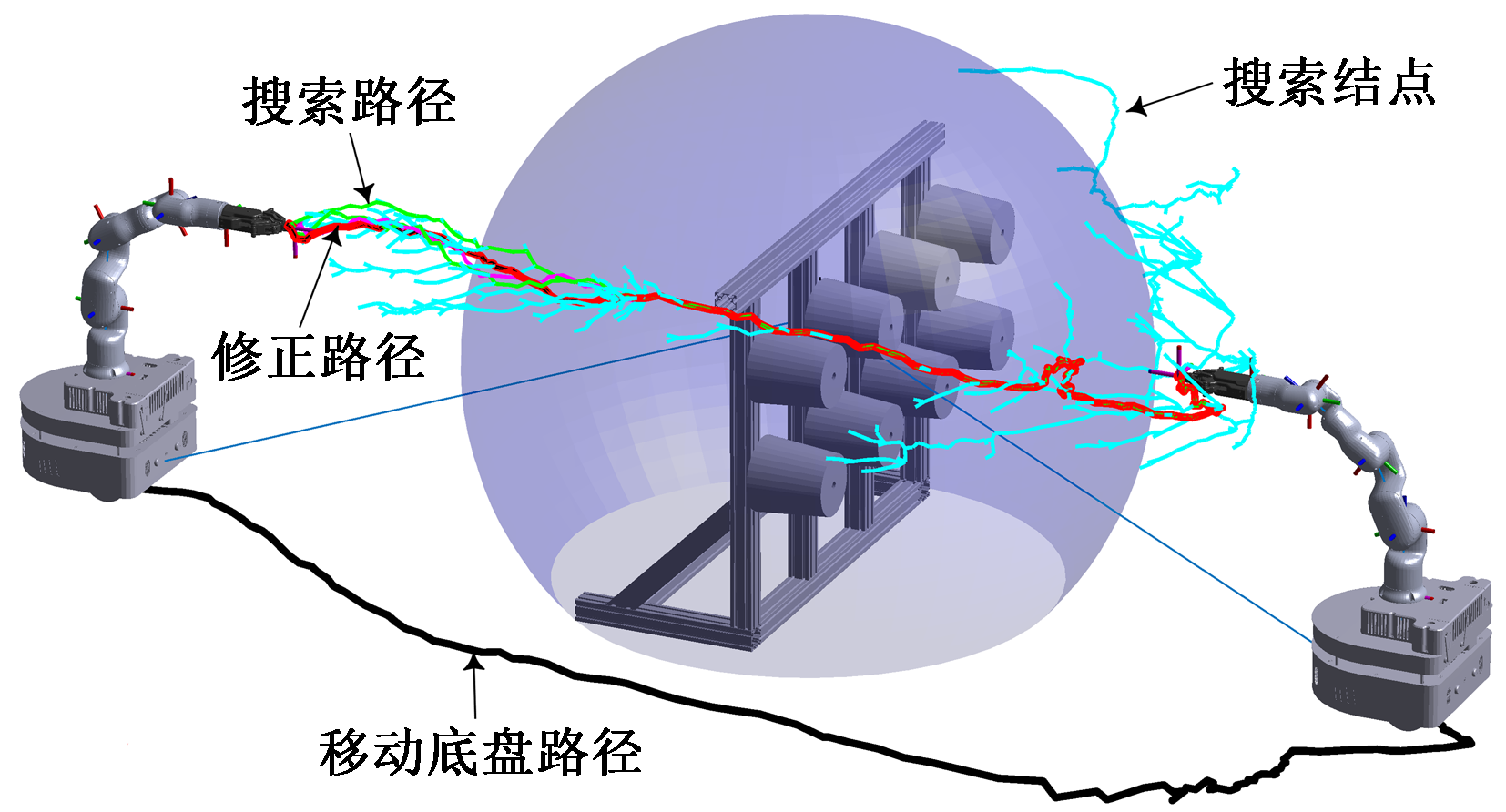
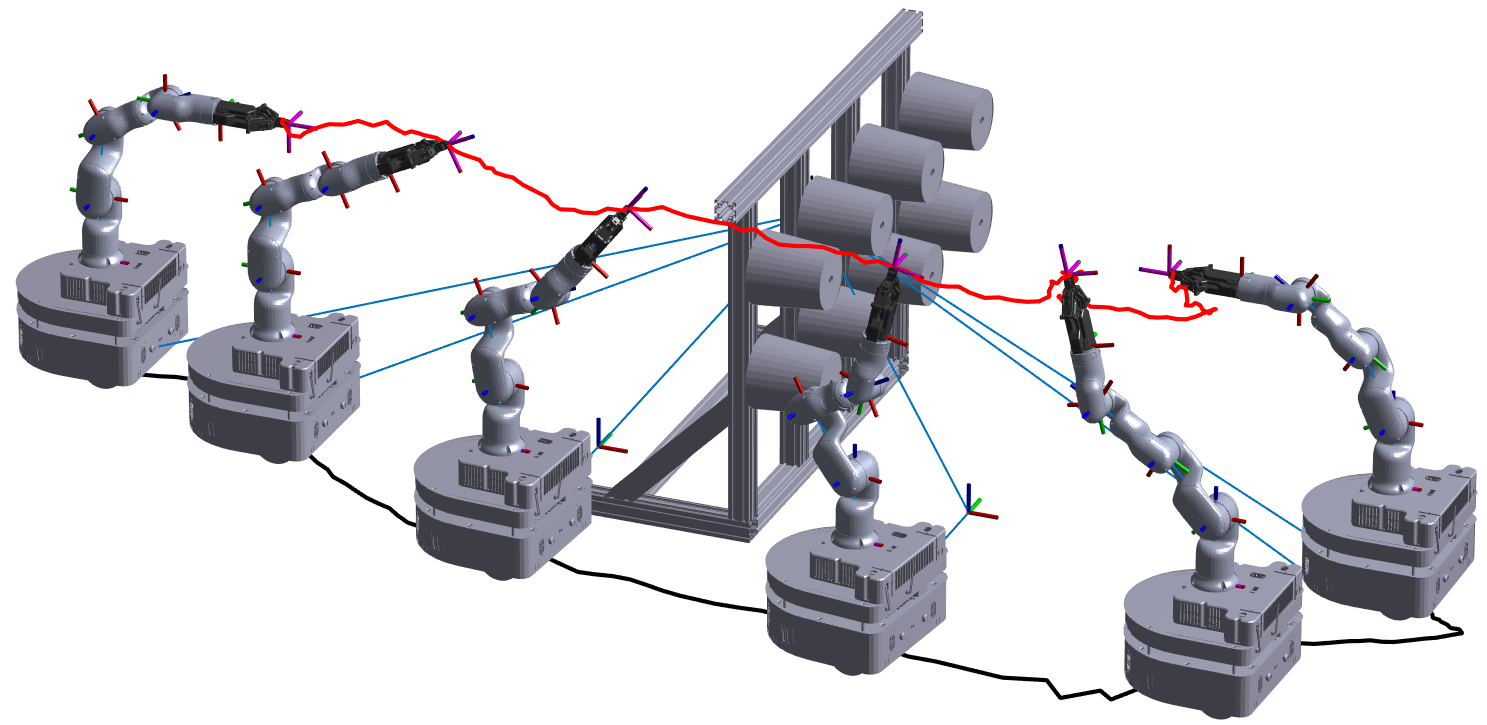
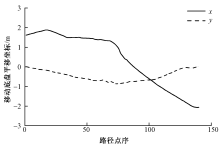
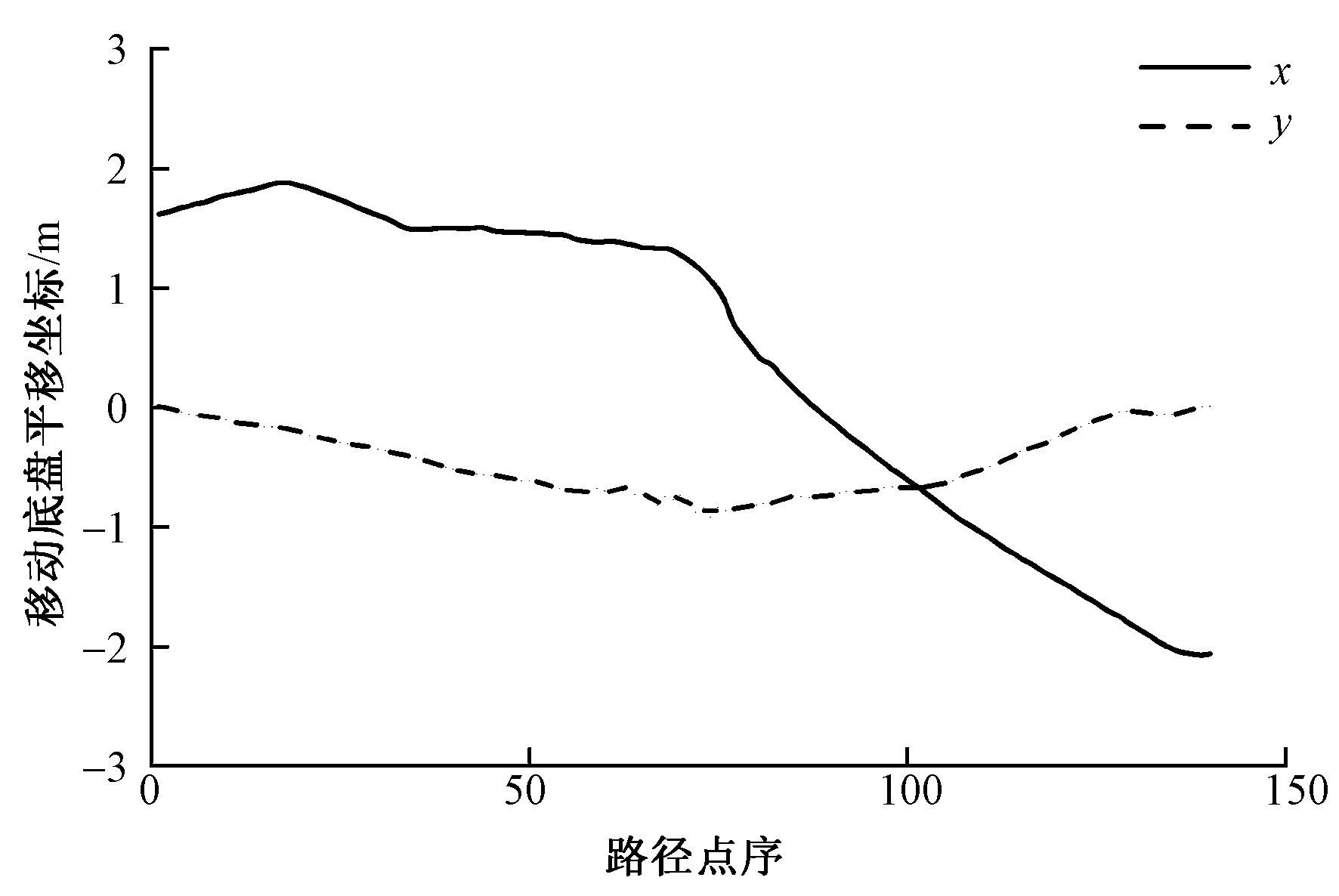
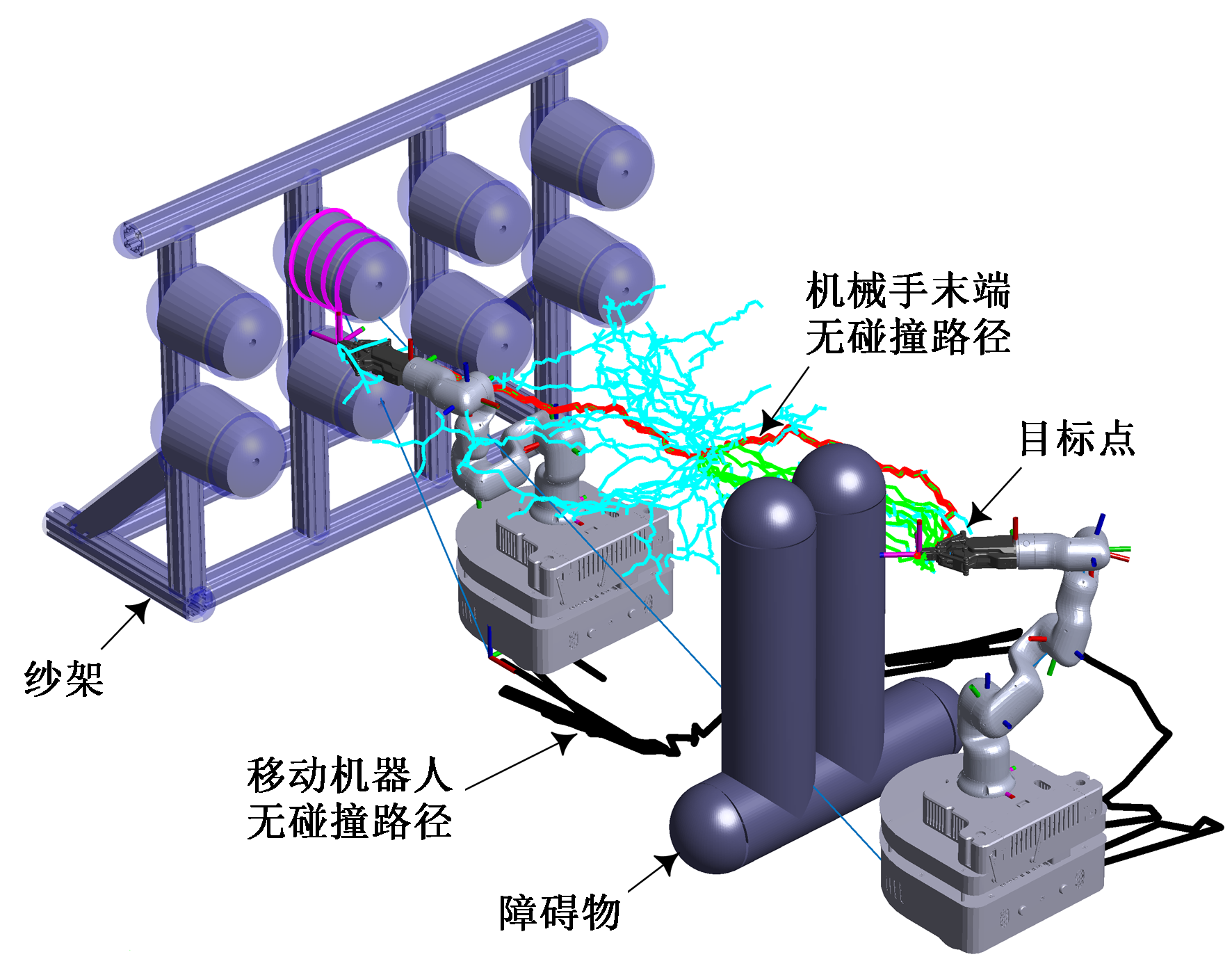
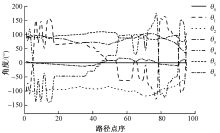
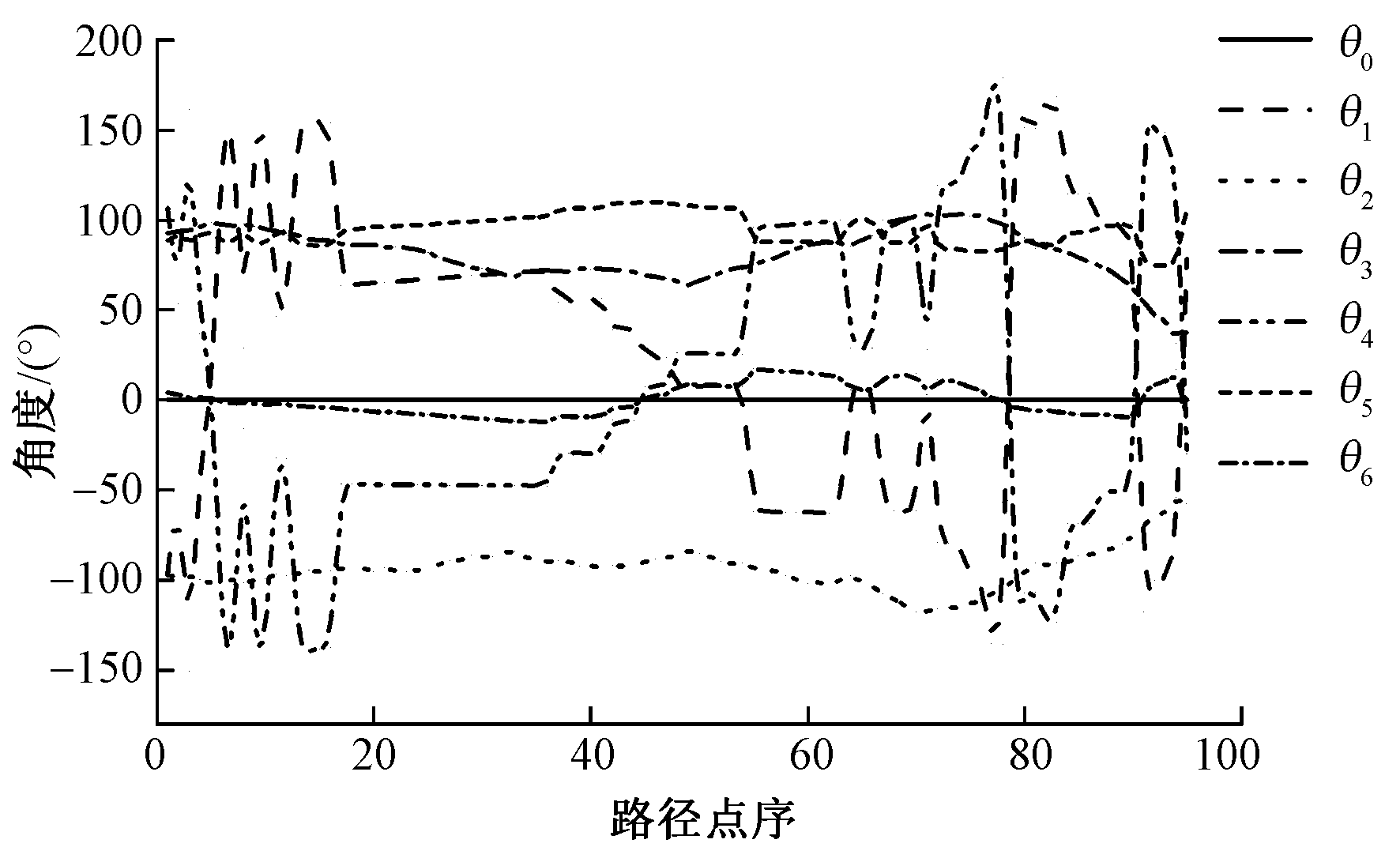
随着纺织工业的智能化转型需求,应用于纺织产业的工业机器人技术不断发展。针对在复杂的纺织加工环境下,机器人对柔性纱线直接操纵存在的纱线形态感知困难与空间局限性,以移动机械臂对织造领域整经纱架上卷装线头的牵引操纵为例,提出一种集成机器人避障运动规划策略的卷装纱线牵引操纵控制框架。构建了卷装纱线系统的动力学模型,解析了机器人与纱线间的运动耦合关系和机器人牵引纱线的运动控制方程,提出了基于纱线轴向应变约束的改进自适应引导快速扩散随机树算法,保障机器人避障运动的同时防止纱线被过度拉伸。通过数值仿真验证了该控制框架的有效性,实现了机械臂对卷装纱线从起点到目标点的无碰撞柔顺牵引操纵。
中图分类号:
| [1] | 郑小虎, 刘正好, 陈峰, 等. 纺织工业智能发展现状与展望[J]. 纺织学报, 2023, 44(8):205-216. |
| ZHENG Xiaohu, LIU Zhenghao, CHEN Feng, et al. Current status and prospect of intelligent development in textile industry[J]. Journal of Textile Research, 2023, 44(8):205-216. | |
| [2] | 张洪, 魏毅, 李铬, 等. 基于机器人的整经机筒子架自动换筒系统研发[J]. 上海纺织科技, 2020, 48(04):25-28. |
| ZHANG Hong, WEIYi, LI Ge, et al. Research and development of automatic tube changing system of warping machine creel based on robot[J]. Shanghai Textile Science & Technology, 2020, 48(04):25-28. | |
| [3] | 李铬, 王庆华, 李幼简, 等. 整经机经轴上落机器人经轴升降机构设计[J]. 上海纺织科技, 2018, 46(10):16-18,56. |
| LI Ge, WANG Qinghua, LI Youjian, et al. Design of lifting mechanism for installing and uninstalling robot of warp shaft of warping machine[J]. Shanghai Textile Science & Technology, 2018, 46(10):16-18,56. | |
| [4] | 李麒阳, 季诚昌, 郗欣甫, 等. 大尺寸异形结构芯模编织策略及纱线轨迹预测[J]. 纺织学报, 2023, 44(10):188-195. |
|
LI Qiyang, JI Chengchang, CHI Xinfu, et al. Braiding strategy and yarn trajectory prediction of large sizespecial-shaped structure mandrel[J]. Journal of Textile Research, 2023, 44(10):188-195.
doi: 10.1177/004051757404400308 |
|
| [5] | 杜立新, 孙云奎, 司志涛, 等. 找纱头装置及整经设备:202211266921.3[P]. 2022-10-17. |
| DU Lixin, SUN Yunkui, SI Zhitao, et al. Thread finding device and warping equipment: 202211266921.3[P]. 2022-10-17. | |
| [6] |
GUO J, ZHANG J, WU D, et al. An algorithm based on bidirectional searching and geometric constrained sampling for automatic manipulation planning in aircraft cable assembly[J]. Journal of Manufacturing Systems, 2020, 57:158-168.
doi: 10.1016/j.jmsy.2020.08.015 |
| [7] |
LV N, LIU J, DING X, et al. Physically based real-time interactive assembly simulation of cable harness[J]. Journal of Manufacturing Systems, 2017, 43(3):385-399.
doi: 10.1016/j.jmsy.2017.02.001 |
| [8] |
SERVIN M, LACOURSUERE C. Rigid body cable for virtual environments[J]. IEEE Transactions on Visualization and Computer Graphics, 2008, 14(4):783-796.
doi: 10.1109/TVCG.2007.70629 pmid: 18467754 |
| [9] |
VALENTINI P, PENNESTRI E. Modeling elastic beams using dynamic splines[J]. Multibody System Dynamics, 2011, 25(3):271-284.
doi: 10.1007/s11044-010-9232-9 |
| [10] |
WANG Q, FANG H, LI N, et al. An efficient FE model of slender members for crash analysis of cable barriers[J]. Engineering Structures, 2013, 52:240-256.
doi: 10.1016/j.engstruct.2013.02.027 |
| [11] | BERGOU M, AUDOLY B, VOUGA E, et al. Discrete viscous threads[J]. ACM Transactions on Graphics, 2010, 29(4):1-10. |
| [12] |
SHABANA A. Definition of the slopes and the finite element absolute nodal coordinate formulation[J]. Multibody System Dynamics, 1997, 1(3):339-34.
doi: 10.1023/A:1009740800463 |
| [13] | 张越, 魏承, 赵阳, 等. 基于ANCF的松弛绳索动力学建模与仿真[J]. 航空学报, 2017, 38(4):162-170. |
| ZHANG Yue, WEI Cheng, ZHAO Yang, et al. Dynamic modeling and simulation of slack rope based on ANCF[J]. Acta Aeronautica et Astronautica Sinica, 2017, 38(4):162-170. | |
| [14] |
ZHANG Y, WEEI C, ZHAO Y, et al. Adaptive ANCF method and its application in planar flexible cables[J]. Acta Mechanica Sinica, 2018, 34(1):199-213.
doi: 10.1007/s10409-017-0721-4 |
| [15] | LI S, WANG Y, MA X, et al. Modeling and simulation of a moving yarn segment: Based on the absolute nodal coordinate formulation[J]. Mathematical Problems in Engineering, 2019(1): 1-15. |
| [16] |
WAKAMATSU H, ARAI E, HIRAL S. Knotting/unknotting manipulation of deformable linear objects[J]. International Journal of Robotics Research, 2006, 25(4):371-395.
doi: 10.1177/0278364906064819 |
| [17] |
RICCARDO Z, GIANLUCA P. Robot learning-based pipeline for autonomous reshaping of a deformable linear object in cluttered backgrounds[J]. IEEE Access, 2021, 9: 138296-138306.
doi: 10.1109/ACCESS.2021.3118209 |
| [18] | RITA L, ROBERT G, FLORIAB T, et al. ReForm: a robot learning sandbox for deformable linear object manipulation[C]// 2021 IEEE International Conference on Robotics and Automation (ICRA). Xi'an, China: IEEE, 2021: 4717-4723. |
| [19] | SHI K, DENNY J, AMATO N. Spark PRM: using RRTs within PRMs to efficiently explore narrow passages[C]// 2014 IEEE International Conference on Robotics and Automation (ICRA). Hong Kong: IEEE, 2014:4659-4666. |
| [20] | ZHU B, LI C, SONG L, et al. A* algorithm of global path planning based on the grid map and V-graph environmental model for the mobile robot[C]// 2017 Chinese Automation Congress (CAC). Jinan: IEEE, 2017: 4973-4977. |
| [21] | ROSTAMI S M H, SANGAIAH A K, WANG J, et al. Obstacle avoidance of mobile robots using modified artificial potential field algorithm[J]. Eurasip Journal on Wireless Communications and networking, 2019.DOI:10.1117/12.2652491. |
| [22] | KANG J G, LIM D W, CHOI Y S, et al. Improved RRT-connect algorithm based on triangular inequality for robot path planning[J]. Preprints, 2021, 21(2):333. |
| [23] |
CAO X M, ZOU X J, JIA C Y, et al. RRT-based path planning for an intelligent litchi-picking mani-pulator[J]. Computers and Electronics in Agriculture, 2019, 156(11/12):105-118.
doi: 10.1016/j.compag.2018.10.031 |
| [24] | YUAN C G, LIU G F, ZHANG W Q, et al. An efficient RRT cache method in dynamic environments for path planning[J]. Robotics and Autonomous Systems, 2020, 131(9): 1-7. |
| [25] |
GAN Y, ZHANG B, KE C, et al. Research on robot motion planning based on RRT algorithm with nonholonomic constraints[J]. Neural Processing Letters, 2021, 53:3011-3029.
doi: 10.1007/s11063-021-10536-4 |
| [26] |
XU G P, MENG Z, LI S, et al. Collision-free trajectory planning for multi-robot simultaneous motion in preforms weaving[J]. Robotica, 2022, 40(12):4218-4237.
doi: 10.1017/S026357472200087X |
| [27] |
YOO W S, DMITROCHENKO O, PARK S J, et al. A new thin spatial beam element using the absolute nodal coordinates: application to a rotating strip[J]. Mechanics Based Design of Structures and Machines, 2005, 33(3):399-422.
doi: 10.1080/15367730500458267 |
| [28] |
HUNT K H, CROSSLEY F R E. Coefficient of restitution interpreted as damping in vibroimpact[J]. Journal of Applied Mechanics-Transactions of the ASME, 1975, 42(2) :440-445.
doi: 10.1115/1.3423596 |
| [29] | DANNY M, KAUFMAN, RASMUS, et al. Adaptive nonlinearity for collisions in complex rod assemblies[J]. ACM Transactions on Graphics, 2014, 33(4): 1-12. |
| [30] | 张越. 基于ANCF的柔索动力学建模与自适应计算研究[D]. 哈尔滨: 哈尔滨工业大学, 2023:12-14. |
| ZHANG Yue. Research on dynamic modeling and adaptive computation of flexible cable based on ANCF[D]. Harbin:Harbin Institute of Technology, 2023:12-14. |
| [1] | 李新荣, 韩鹏辉, 李瑞芬, 贾坤, 路元江, 康雪峰. 数字孪生在纺纱领域应用的关键技术解析[J]. 纺织学报, 2023, 44(10): 214-222. |
| [2] | 郑小虎, 刘正好, 陈峰, 张洁, 汪俊亮. 纺织工业智能发展现状与展望[J]. 纺织学报, 2023, 44(08): 205-216. |
| [3] | 乌婧, 江振林, 吉鹏, 谢锐敏, 陈烨, 陈向玲, 王华平. 纺织品前瞻性制备技术及应用研究现状与发展趋势[J]. 纺织学报, 2023, 44(01): 1-10. |
| [4] | 张洁, 徐楚桥, 汪俊亮, 郑小虎. 数据驱动的机器人化纺织生产智能管控系统研究进展[J]. 纺织学报, 2022, 43(09): 1-10. |
| [5] | 毛慧敏, 孙磊, 屠佳佳, 史伟民. 纱线自动接头机关键技术[J]. 纺织学报, 2022, 43(09): 21-26. |
| [6] | 高晓飞, 齐立哲, 孙云权. 面向柔性面料立体缝纫的随形机械手设计[J]. 纺织学报, 2022, 43(09): 27-33. |
| [7] | 刘锋, 徐杰, 柯文博. 基于深度强化学习的服装缝制过程实时动态调度[J]. 纺织学报, 2022, 43(09): 41-48. |
| [8] | 纪柏林, 王碧佳, 毛志平. 纺织染整领域支撑低碳排放的关键技术[J]. 纺织学报, 2022, 43(01): 113-121. |
| [9] | 杜劲松, 余雅芸, 赵妮, 谢子昂, 费中华, 潘静姝. 不同类型服装企业智能制造能力成熟度评价模型[J]. 纺织学报, 2021, 42(05): 162-167. |
| [10] | 汪松松, 彭来湖, 戴宁, 沈春娅, 胡旭东. 基于工业互联网的针织机械互联互通结构研究[J]. 纺织学报, 2020, 41(01): 165-173. |
| [11] | 周亚勤, 汪俊亮, 鲍劲松, 张洁. 纺织智能制造标准体系架构研究与实现[J]. 纺织学报, 2019, 40(04): 145-151. |
| [12] | 蒋高明 高哲 高梓越. 针织智能制造研究进展[J]. 纺织学报, 2017, 38(10): 178-183. |
| [13] | 梅顺齐 胡贵攀 王建伟 陈振 徐巧. 纺织智能制造及其装备若干关键技术的探讨[J]. 纺织学报, 2017, 38(10): 166-171. |
| [14] | 张洁 吕佑龙 汪俊亮 王海超 . 大数据驱动的纺织智能制造平台架构[J]. 纺织学报, 2017, 38(10): 159-165. |
| [15] | 胡旭东 沈春娅 彭来湖 汝欣. 针织装备的智能制造及互联互通标准验证[J]. 纺织学报, 2017, 38(10): 172-177. |
|
||
 京公网安备11010502044800号
京公网安备11010502044800号