纺织学报 ›› 2024, Vol. 45 ›› Issue (06): 186-192.doi: 10.13475/j.fzxb.20230404401
李博1,2( ), 刘旭柠1,2, 郭杰1,2, 胡凯3, 畅博彦1,2, 魏展1,2
), 刘旭柠1,2, 郭杰1,2, 胡凯3, 畅博彦1,2, 魏展1,2
LI Bo1,2(), LIU Xuning1,2, GUO Jie1,2, HU Kai3, CHANG Boyan1,2, WEI Zhan1,2
摘要:
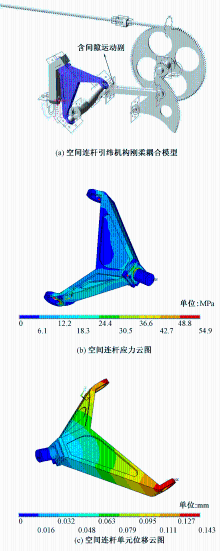
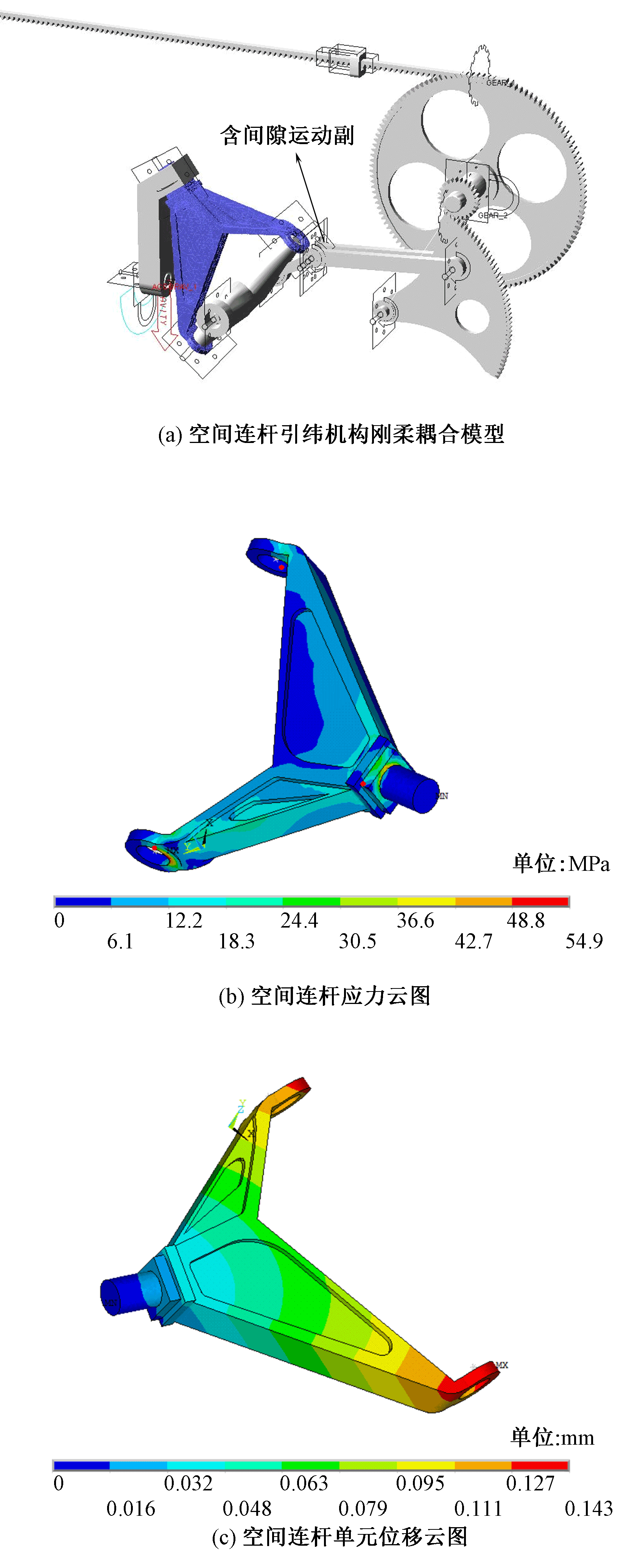
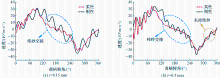
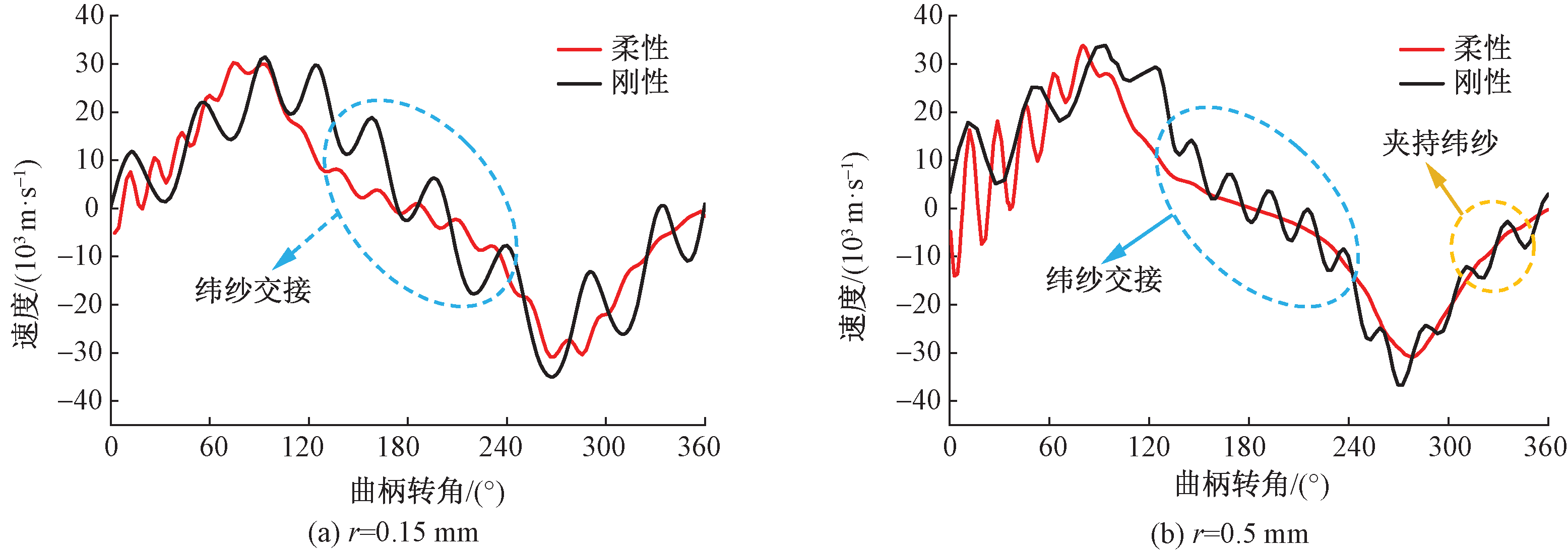
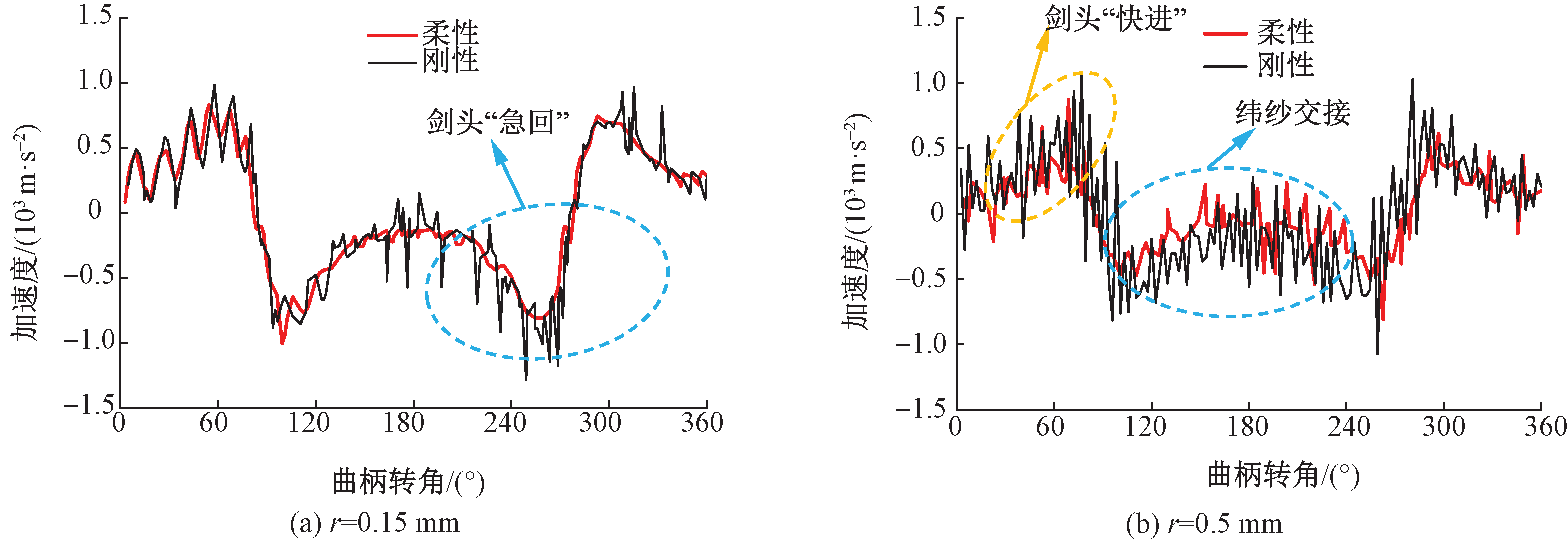
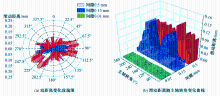
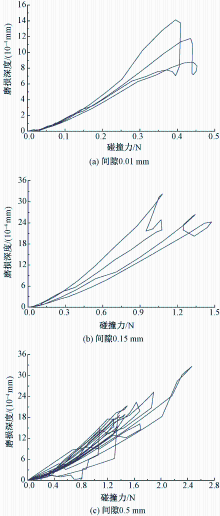
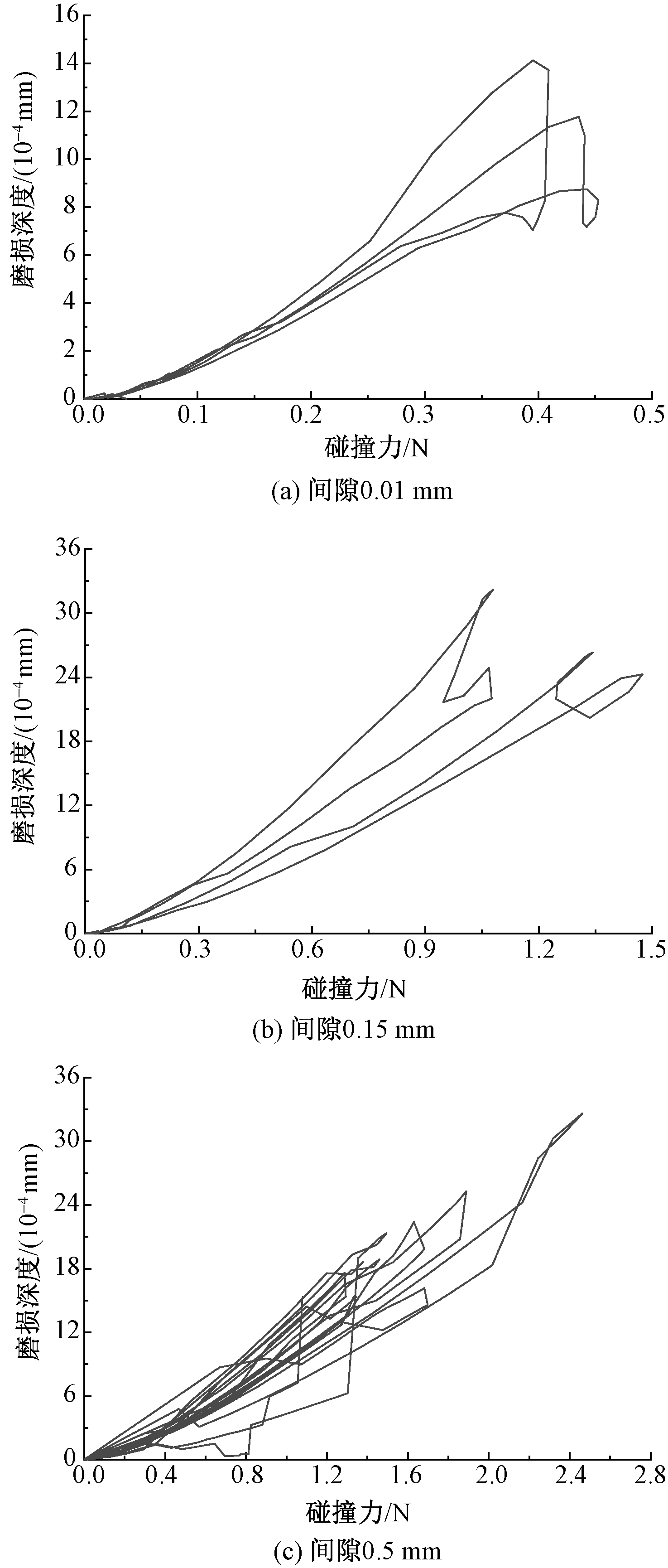
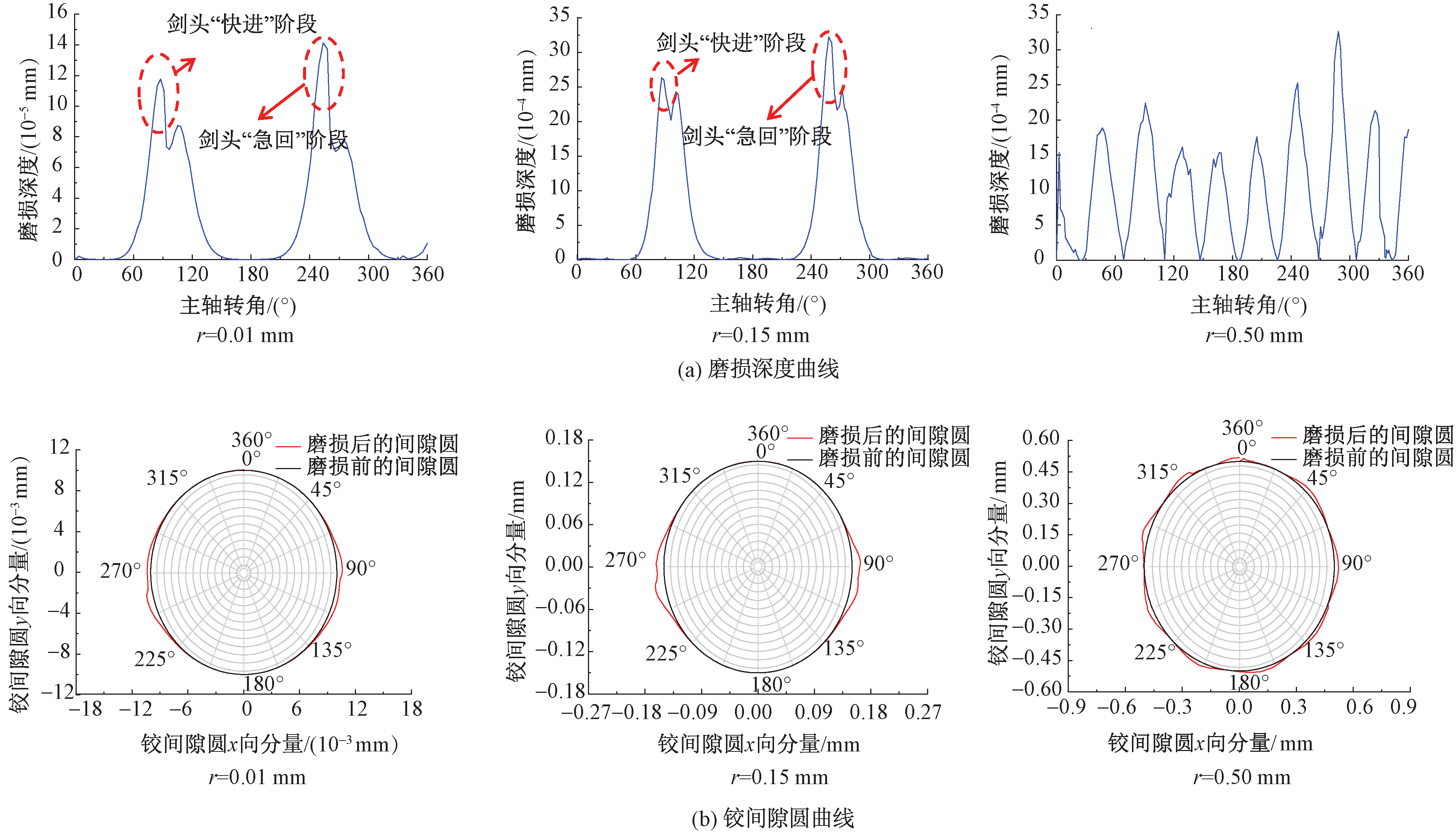
为准确预测空间连杆引纬机构间隙磨损机制,通过结合Lankarani-Nikravesh与Bai碰撞力模型,建立可变刚度与阻尼系数非连续接触碰撞力模型,采用改进的Coulomb摩擦力模型描述含间隙机构旋转铰的切向摩擦力,通过Lagrange方法对系统动力学建模;其次选取空间连杆为柔性化对象,综合Ansys与Adams分析,对空间连杆引纬机构进行刚柔耦合动力学仿真;最后将系统的动态仿真响应结果与Archard模型相结合,求解运动副磨损情况。结果表明:柔性构件可以有效缓解机构间隙碰撞的冲击作用,间隙为0.15 mm条件下,剑头加速度振荡最大幅值缩减53.2%;当间隙升至0.5 mm后,虽磨损范围大幅增加,但间隙磨损深度并未随之大幅提升。
中图分类号:
| [1] | 张雷, 贺虎, 孔佳元. 含间隙和尺寸误差空间连杆引纬机构运动精度综合分析[J]. 纺织学报, 2016, 37(6): 124-129, 135. |
| ZHANG Lei, HE Hu, KONG Jiayuan. Comprehensive analysis of motion accuracy for spatial linkage weft insertion mechanism with clearance and dimensional errors[J]. Journal of Textile Research, 2016, 37(6): 124-129, 135. | |
| [2] | 余克龙, 张雷. 基于变曲柄材料的空间四杆引纬机构柔性动力学仿真研究[J]. 机械科学与技术, 2013, 32(10): 1505-1508. |
| YU Kelong, ZHANG Lei. Flexible dynamics simulation for space four bar linkage weft insertion mechanism based on variable axle diameter of sector gear[J]. Mechanical Science and Technology for Aerospace Engineering, 2013, 32(10): 1505-1508. | |
| [3] |
韩钊, 连子豪, 郑恩来, 等. 含非规则粗糙间隙表面铰链关节的平面柔性多连杆传动系统动态误差与运动副磨损周期行为分析[J]. 机械工程学报, 2022, 58(19): 115-129.
doi: 10.3901/JME.2022.19.115 |
|
HAN Zhao, LIAN Zihao, ZHENG Enlai, et al. Analysis of dynamic error and wear cycle behavior of kinematic pair for planar flexible multi-link transmission system including revolute clearance joints with irregular rough surfaces[J]. Journal of Mechanical Engineering, 2022, 58(19): 115-129.
doi: 10.3901/JME.2022.19.115 |
|
| [4] | TING K, HSU K, YU Z T, et al. Clearance-induced output position uncertainty of planar linkages with revolute and prismatic joints[J]. Mechanism and Machine Theory, 2017, 111: 66-75. |
| [5] | QIAN M, QIN Z, YAN S, et al. A comprehensive method for the contact detection of a translational clearance joint and dynamic response after its application in a crank-slider mechanism[J]. Mechanism and Machine Theory, 2020, 145: 1-19. |
| [6] | 李博, 胡凯, 金国光, 等. 空间连杆引纬机构柔性铰间隙动态特性研究[J]. 纺织学报, 2021, 42(1): 145-153. |
| LI Bo, HU Kai, JIN Guoguang, et al. Research on dynamic characteristics of spatial-linkage weft insertion mechanism considering flexible hinge clearance[J]. Journal of Textile Research, 2021, 42(1): 145-153. | |
| [7] | BAI Z F, SUN Y. A study on dynamics of planar multibody mechanical systems with multiple revolute clearance joints[J]. European Journal of Mechanics-A/Solids, 2016, 60(5): 95-111. |
| [8] | RAMIN A, ZHAO K. Micromechanics of material detachment during adhesive wear: a numerical assessment of Archard's model[J]. Wear, 2021, 476: 1-6. |
| [9] | SOHA B, PIERRE A, SIEGFRIED F. Modeling contact oxygenation and adhesive wear extension in axisymmetric flat circular fretting interfaces[J]. Wear, 2021, 477: 1-13. |
| [10] | WU C H, ZHANG L C, QU P L, et al. Surface texture transfer in skin-pass rolling with the effect of roll sur-face wear[J]. Wear, 2021, 476: 12-37. |
| [11] | DANIEL S, MARTIN B, BAS S, et al. A novel model-based approach for the prediction of wear in cold rolling[J]. Wear, 2017, 376/377: 1245-1259. |
| [12] | TAN H Y, HU Y J, LI L. Effect of friction on the dynamic analysis of slider-crank mechanism with clearance joint[J]. International Journal of Non-Linear Mechanics, 2019, 115(6): 20-40. |
| [13] | CHEN X, JIANG S, WANG S, et al. Dynamics analysis of planar multi-DOF mechanism with multiple revolute clearances and chaos identification of revolute clearance joints[J]. Multibody System Dynamics, 2019, 47(4): 317-345. |
| [14] | JIANG S, CHEN X L. Reducing undesirable effects of clearances on dynamic and wear of planar multi-link mechanism[J]. Nonlinear Dyn amics, 2020, 5(20): 9-29. |
| [15] | BAPTISTA A, SILVA F J G, PINTO G, et al. Influence of the ball surface texture in the dragging of abrasive particles on micro-abrasion wear tests[J]. Wear, 2021, 476: 19-43. |
| [16] | XU L X, HAN Y C, DONG Q B, et al. An approach for modelling a clearance revolute joint with a constantly updating wear profile in a multibody system simulation and experiment[J]. Multibody System Dynamics, 2018, 6(55): 1-22. |
| [17] | MAKOTO A, TAKAFUMI K. Numerical simulation model for the competition between short crack propagation and wear in the wheel tread[J]. Wear, 2020, 448/449: 89-114. |
| [1] | 喻陈楠, 贾江鸣, 陈之威, 陈建能, 陈加友, 陆文韬. 新型剑杆织机引纬机构的反求建模与运动学仿真[J]. 纺织学报, 2021, 42(01): 154-161. |
| [2] | 李博, 胡凯, 金国光, 魏展, 畅博彦. 空间连杆引纬机构柔性铰间隙动态特性研究[J]. 纺织学报, 2021, 42(01): 145-153. |
| [3] | 魏展, 金国光, 李博, 宋艳艳, 路春辉. 剑杆织机打纬凸轮接触碰撞力建模与仿真[J]. 纺织学报, 2020, 41(03): 154-159. |
| [4] | 周香琴, 顾叶琴, 吴震宇. 可简便调幅的剑杆织机引纬机构参数特征[J]. 纺织学报, 2019, 40(09): 173-179. |
| [5] | 徐巧 闫文军 梅顺齐 张智明. 基于电磁发射的超宽门幅自动织机引纬机构设计方法[J]. 纺织学报, 2018, 39(07): 130-136. |
| [6] | 张雷 苏宗帅 季祖鹏 顾萍萍. 共轭凸轮引纬机构的凸轮轮廓线光顺与反求[J]. 纺织学报, 2017, 38(12): 141-149. |
| [7] | 张雷 孔佳元 雷炳杰 李杨. 变导程螺旋引纬机构剑杆位移曲线的设计[J]. 纺织学报, 2017, 38(04): 121-126. |
| [8] | 张雷 贺虎 孔佳元. 含间隙和尺寸误差空间连杆引纬机构运动精度综合分析[J]. 纺织学报, 2016, 37(06): 124-129. |
| [9] | 张雷 余克龙 陈少钟 张吉峰. 基于ANSYS和ADAMS空间四连杆引纬机构的柔性动力学仿真[J]. 纺织学报, 2013, 34(5): 116-120. |
| [10] | 陈建能;赵雄;张国凤;赵匀. 基于改进NSGA-Π算法的新型引纬机构的参数优化[J]. 纺织学报, 2008, 29(1): 110-113. |
| [11] | 周琪甦;沈世德. 新型机织小样机引纬机构设计[J]. 纺织学报, 2007, 28(2): 112-114. |
| [12] | 郑智毓;李加林;陶永政. G6300型剑杆织机引纬机构分析[J]. 纺织学报, 2005, 26(6): 91-92. |
| [13] | 李克让;陈明. 剑杆引纬机构的传动规律研究[J]. 纺织学报, 2004, 25(01): 44-45. |
| [14] | 竺志超;李志祥. 引纬机构的遗传算法优化设计[J]. 纺织学报, 2002, 23(03): 34-35. |
| [15] | 黄晨;李克让;陈明. 正置空间曲柄摇杆引纬机构的运动规律研究[J]. 纺织学报, 2001, 22(02): 7-9. |
|
||
 京公网安备11010502044800号
京公网安备11010502044800号