纺织学报 ›› 2024, Vol. 45 ›› Issue (07): 10-17.doi: 10.13475/j.fzxb.20230305301
王文1, 张乐乐1, 黄阳杰1, 谭浩1, 方舒婷1, 向晨雪2, 王栋1,2( )
)
WANG Wen1, ZHANG Lele1, HUANG Yangjie1, TAN Hao1, FANG Shuting1, XIANG Chenxue2, WANG Dong1,2()
摘要:
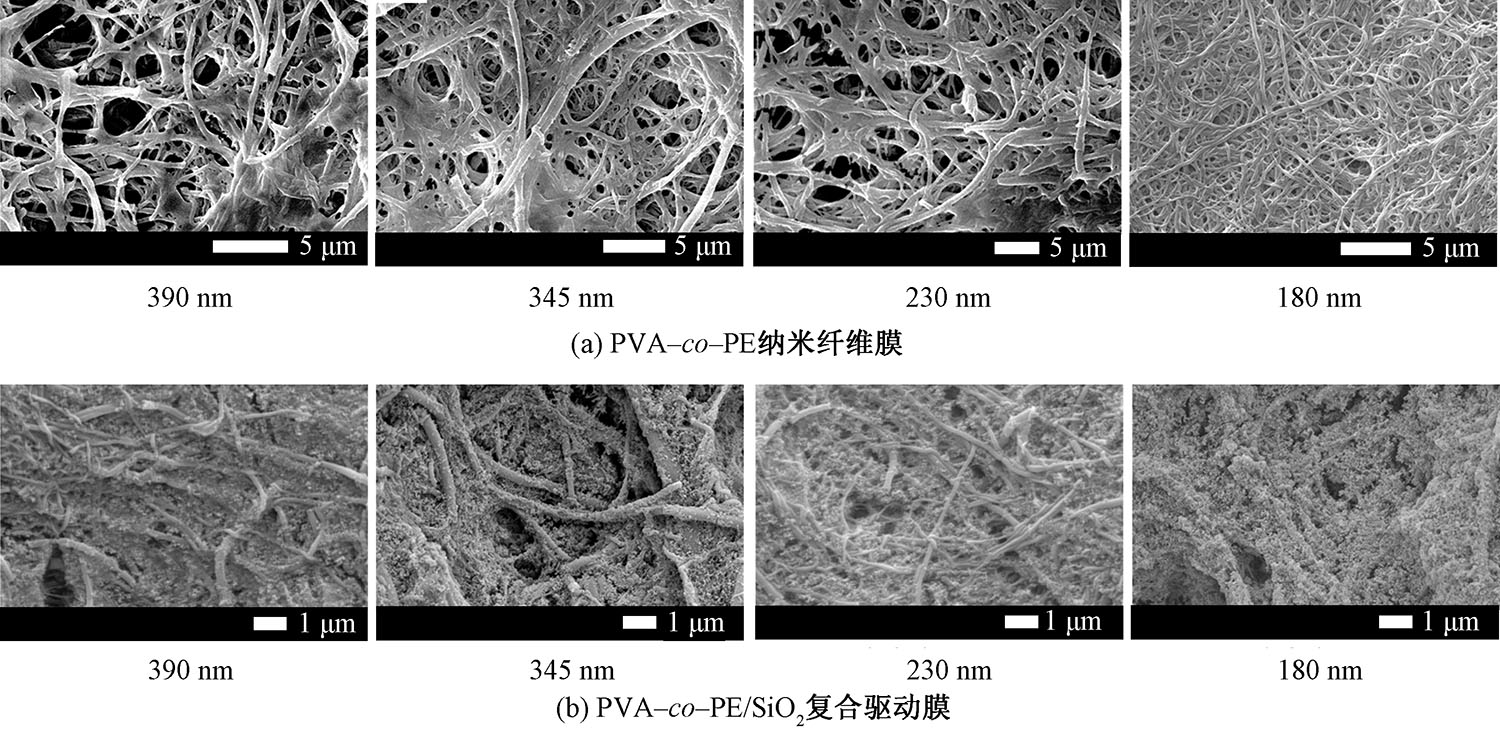
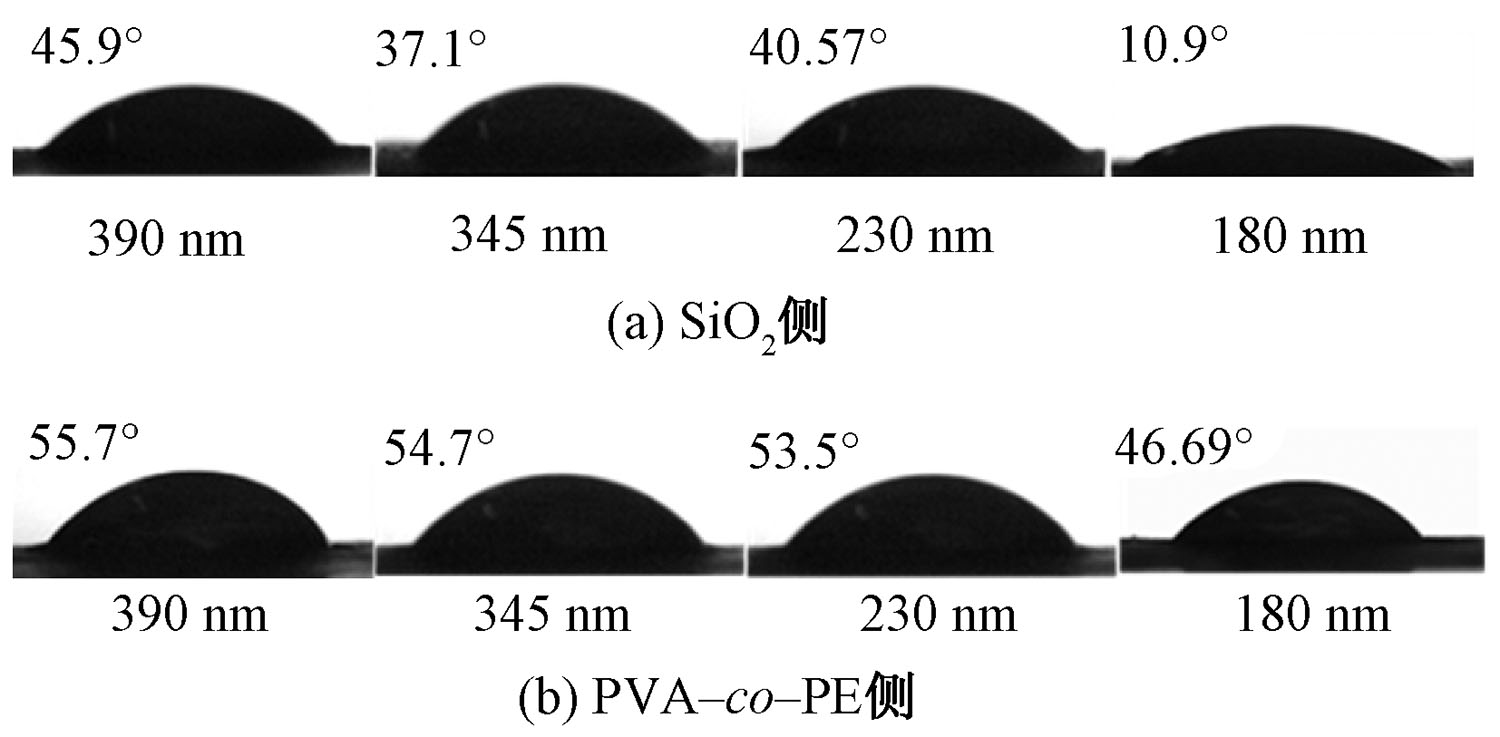
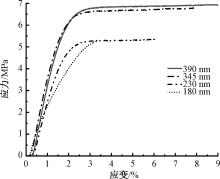
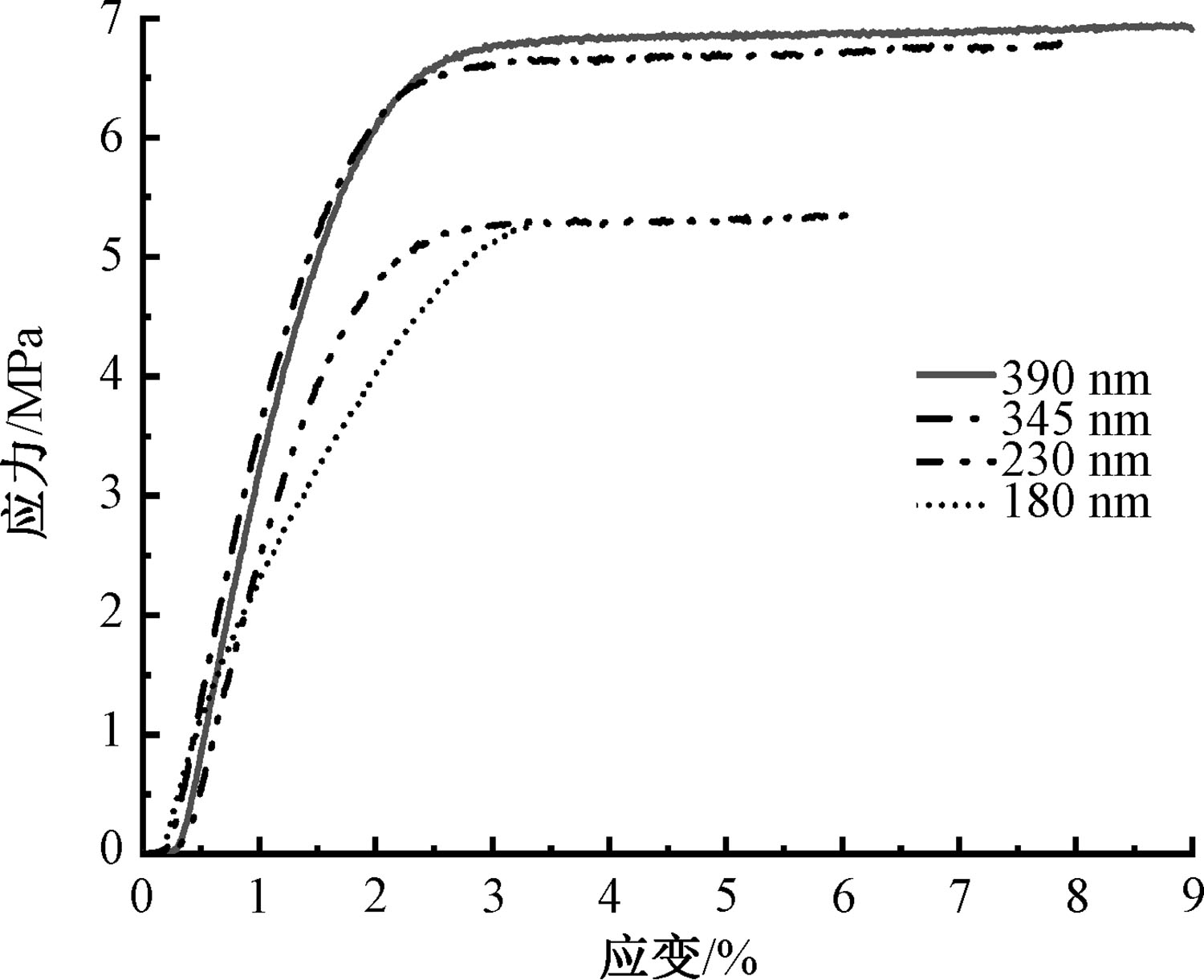
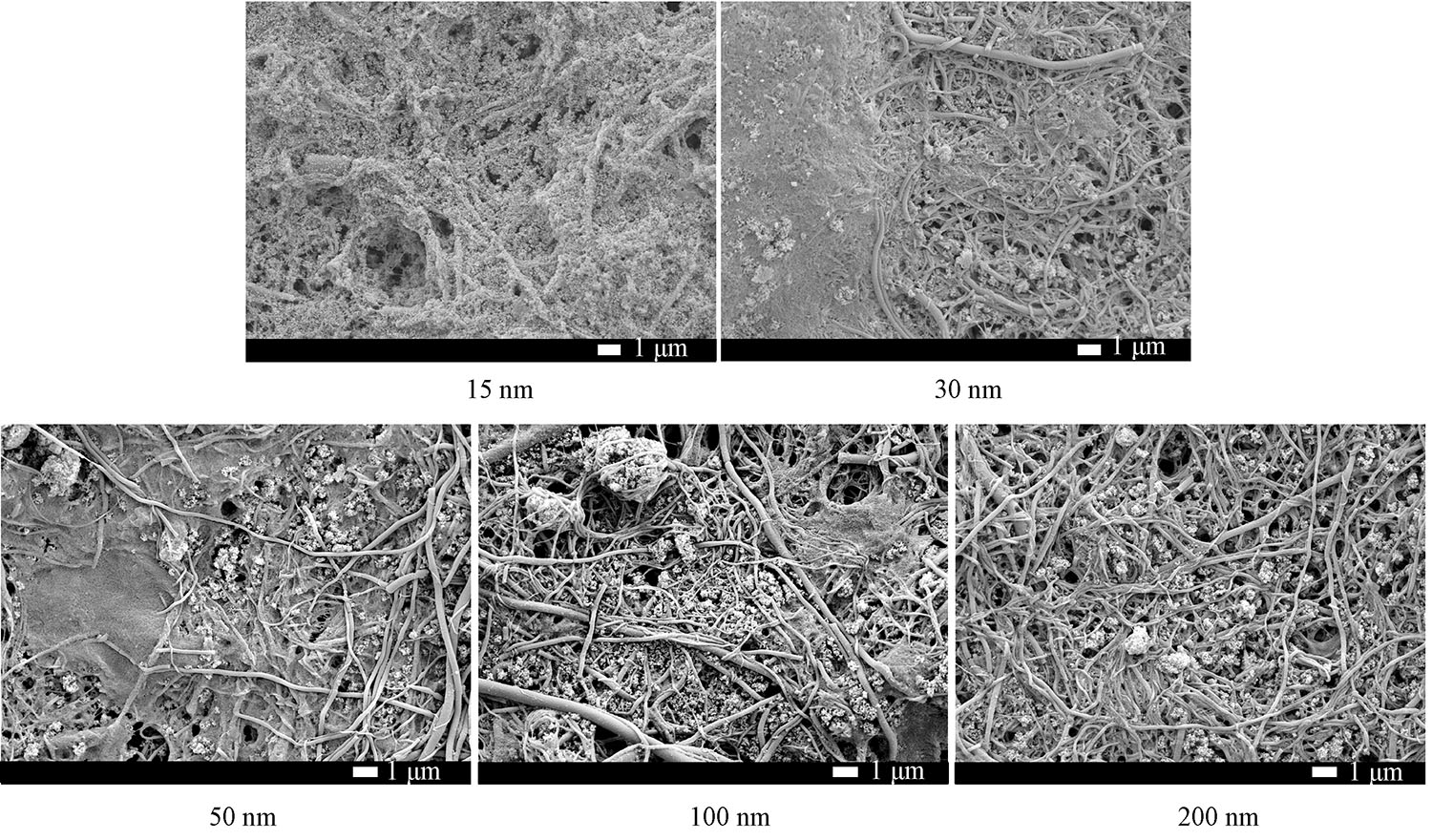
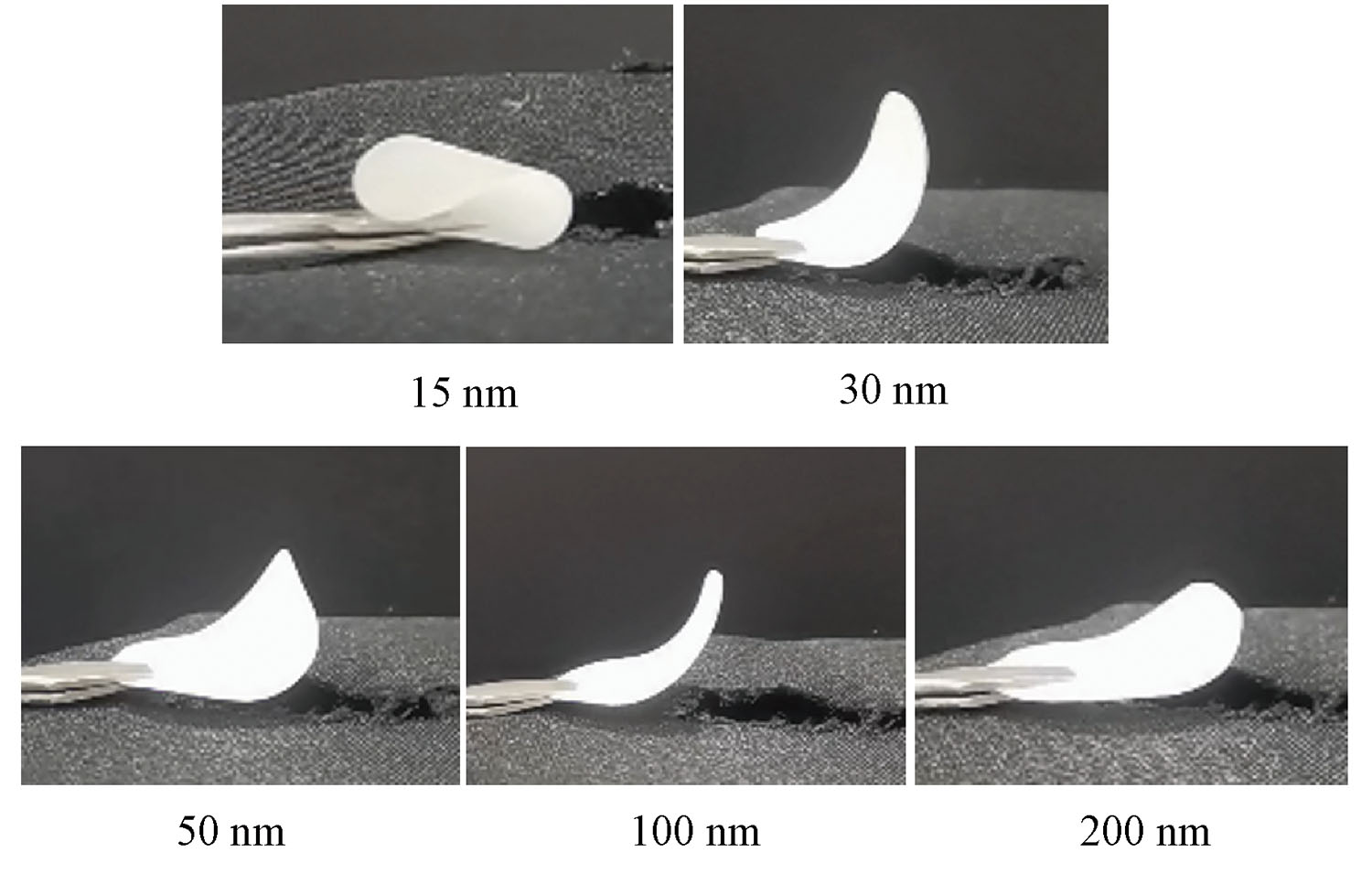
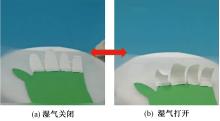
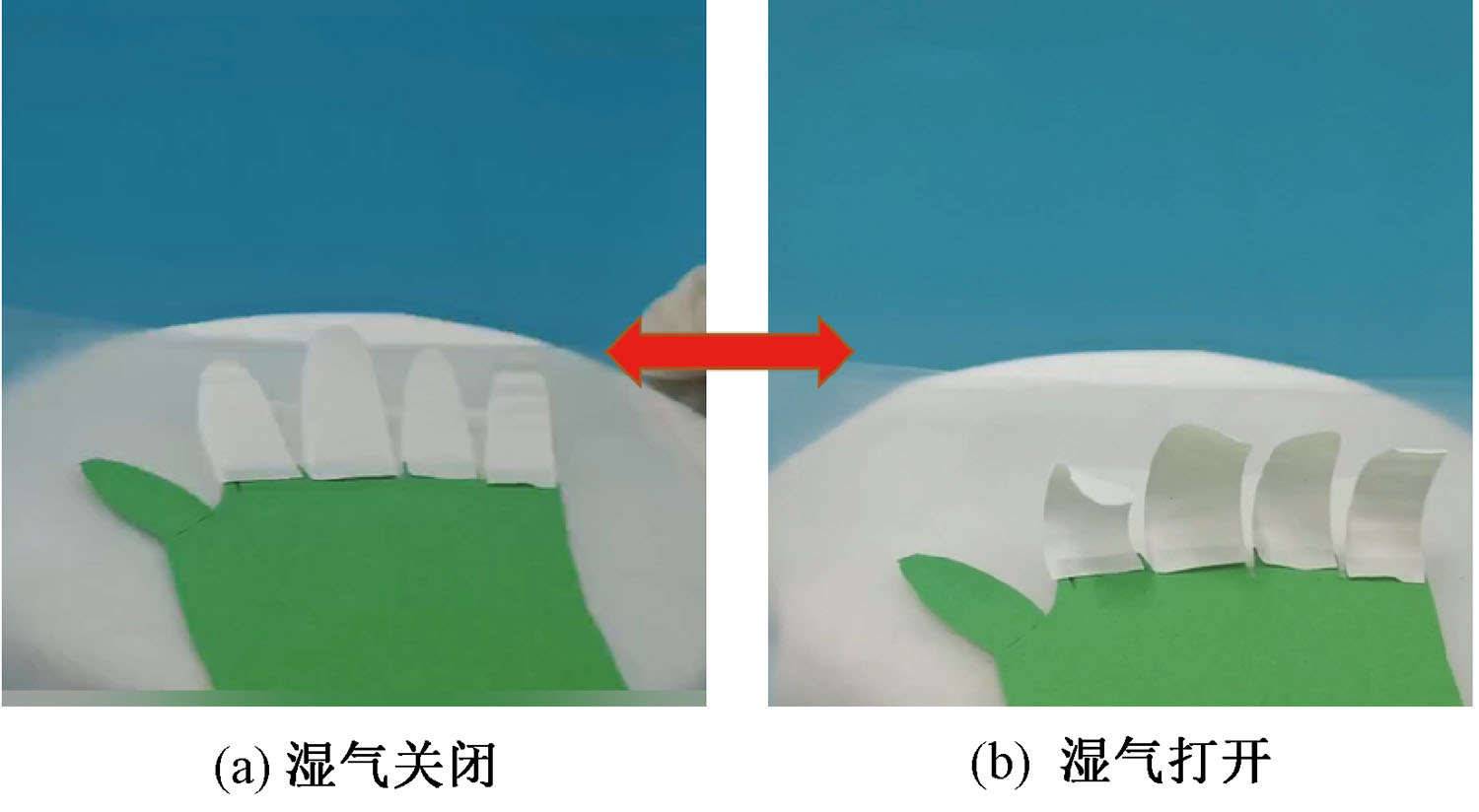
针对当前柔性智能驱动材料在开发过程中存在的响应性差、制备工艺复杂、成本高、刺激源污染大等问题,采用分层喷涂法制得具有非对称结构的聚乙烯醇-乙烯共聚物(PVA-co-PE)/SiO2双层复合柔性驱动膜,并对其表面形貌、亲疏水性、力学性能、驱动性能等进行表征与测试分析。结果表明:纳米纤维直径越小,越有利于SiO2粉体在纳米纤维表面的附着,复合驱动膜的亲水性随着纳米纤维直径的增加呈现逐渐下降的趋势,同时纤维直径的增加可大幅提升复合驱动膜的拉伸应力;另外,随着纳米纤维直径从180 nm增加至390 nm,复合驱动膜的形变角度逐渐变小,且当复合驱动膜中纳米纤维直径为180 nm,SiO2粉体粒径为15 nm时,制备的复合驱动膜具有最佳的驱动性能,在0.7 s左右即可达到180°的最大弯曲角度。基于该PVA-co-PE/SiO2复合驱动膜快速的刺激响应性、大尺度的弯曲形变能力,其在智能操控、人工肌肉以及智能服装领域中具有较好的应用前景。
中图分类号:
| [1] | WANG Wen, LIU Shuying, WANG Shuang, et al. Silicon distribution-induced actuation film with bidirectional bending deformation and versatile bionic applications[J]. ACS Applied Materials & Interfaces, 2022, 14(49): 55264-55276. |
| [2] |
CHEN Dustin, PEI Qibing. Electronic muscles and skins: a review of soft sensors and actuators[J]. Chem Rev, 2017, 117: 11239-11268.
doi: 10.1021/acs.chemrev.7b00019 pmid: 28816043 |
| [3] | WANG Wen, WANG Shuang, XIANG Chenxue, et al. Graphene oxide/nanofiber-based actuation films with moisture and photothermal stimulation response for remote intelligent control applications[J]. ACS Applied Materials & Interfaces, 2021, 13(40): 48179-48188. |
| [4] | WANG Jingfeng, LIU Yuyan, CHENG Zhongjun, et al. Highly conductive MXene film actuator based on moisture gradients[J]. Angewandte Chemie International Edition, 2020, 59: 14029-14033. |
| [5] |
AGNARSSON Ingi, DHINOJWALA Ali, SAHNI Vasav, et al. Spider silk as a novel high performance biomimetic muscle driven by humidity[J]. Journal of Experimental Biology, 2009, 212: 1990-1994.
doi: 10.1242/jeb.028282 pmid: 19525423 |
| [6] |
KANIK Mehmet, ORGUC Sirma, VARNAVIDES Georgios, et al. Strain-programmable fiber-based artificial muscle[J]. Science, 2019, 365(6449): 145-150.
doi: 10.1126/science.aaw2502 pmid: 31296764 |
| [7] | JIANG Shaohua, LIU Fangyao, LERCH Arne, et al. Unusual and superfast temperature-triggered actu-ators[J]. Advanced Materials, 2015, 27(33): 4865-4870. |
| [8] | MO Kangwei, HE Meng, CAO Xiaodong, et al. Direct current electric field induced gradient hydrogel actuators with rapid thermo-responsive performance as soft manipulators[J]. Journal of Materials Chemistry C, 2020, 8(8): 2756-2763. |
| [9] | ZHU Qing, JIN Yuxia, WANG Wen, et al. Bioinspired smart moisture actuators based on nanoscale cellulose materials and porous, hydrophilic EVOH nanofibrous membranes[J]. ACS Applied Materials & Interfaces, 2019, 11(1): 1440-1448. |
| [10] | HYEON Jae Sang, PARK Jong Woo, BAUGHMAN Ray H, et al. Electrochemical graphene/carbon nanotube yarn artificial muscles[J]. Sensors and Actuators B: Chemical, 2019, 286: 237-242. |
| [11] | XIAO Peishuang, YI Ningbo, ZHANG Tengfei, et al. Construction of a fish-like robot based on high performance graphene/PVDF bimorph actuation materials[J]. Advanced Science, 2016. DOI: 10.1002/advs.201500438. |
| [12] | 张海璇, 孟旬, 李平. 光和温度刺激响应型材料[J]. 化学进展, 2008, 20(5): 657-672. |
| ZHANG Haixuan, MENG Xun, LI Ping. Light and thermal stimuli responsive materials[J]. Progress in Chemistry, 2008, 20(5): 657-672. | |
| [13] | KIM Dowan, LEE Heon Sang, YOON Jinhwan. Highly bendable bilayer-type photo-actuators comprising of reduced graphene oxide dispersed in hydrogels[J]. Scientific Reports, 2016, 6(1): 1-10. |
| [14] | ZHENG Li, DONG Shijie, NIE Jinhui, et al. Dual-stimulus smart actuator and robot hand based on a vapor-responsive PDMS film and triboelectric nano-generator[J]. ACS Applied Materials & Interfaces, 2019, 11(45):42504-42511. |
| [15] | LU Haojian, ZHANG Mei, YANG Yuanyuan, et al. A bioinspired multilegged soft millirobot that functions in both dry and wet conditions[J]. Nature Communications, 2018, 9(1): 1-7. |
| [16] | 彭阳阳, 盛楠, 孙丰鑫. 纤维基湿敏柔性驱动器的跨尺度构建及其性能[J]. 纺织学报, 2023, 44(2): 90-95. |
| PENG Yangyang, SHENG Nan, SUN Fengxin. Scalable construction and performance of fiber-based flexible moisture-responsive actuators[J]. Journal of Textile Research, 2023, 44(2): 90-95. | |
| [17] | CHEN Xi, GOODNIGHT Davis, GAO Zhenghan, et al. Scaling up nanoscale water-driven energy conversion into evaporation-driven engines and generators[J]. Nature Communications, 2015, 6(1): 1-7. |
| [18] |
MA Mingming, GUO Liang, ANDERSON Daniel G, et al. Bio-inspired polymer composite actuator and generator driven by water gradients[J]. Science, 2013, 339(6116):186-189.
doi: 10.1126/science.1230262 pmid: 23307738 |
| [19] | WANG Dong, SUN Gang, CHIOU Bor-Sen. A high-throughput, controllable, and environmentally benign fabrication process of thermoplastic nanofibers[J]. Macromolecular Materials & Engineering, 2010, 292(4): 407-414. |
| [20] | 陆莹, 吴志红, 罗梦颖, 等. PVA-co-PE 纳米纤维过滤膜的制备及性能表征[J]. 东华大学学报(自然科学版), 2014, 40(2): 161-166. |
| LU Ying, WU Zhihong, LUO Mengying, et al. Preparation and performance characterization of PVA-co-PE nanofiber membrane[J]. Journal of Donghua University (Natural Science), 2014, 40(2): 161-166. |
| [1] | 卢妍, 洪岩, 方剑. 智能背景下机器学习在柔性应变传感器中的应用研究进展[J]. 纺织学报, 2024, 45(05): 228-238. |
| [2] | 田博阳, 王向泽, 杨湙雯, 吴晶. 非对称结构纤维膜的制备及其热调控性能[J]. 纺织学报, 2024, 45(02): 11-20. |
| [3] | 王汉琛, 吴嘉茵, 黄彪, 卢麒麟. 生物相容性纳米纤维素自愈合水凝胶的构建及其性能[J]. 纺织学报, 2023, 44(12): 17-25. |
| [4] | 石磊, 张琳炜, 刘亚, 夏磊, 庄旭品. 分离膜湿法非织造支撑体的结构设计与应用[J]. 纺织学报, 2022, 43(06): 15-21. |
|
||
 京公网安备11010502044800号
京公网安备11010502044800号