纺织学报 ›› 2024, Vol. 45 ›› Issue (09): 220-227.doi: 10.13475/j.fzxb.20230504801
袁汝旺1,2( ), 李文豪1,2
), 李文豪1,2
YUAN Ruwang1,2(), LI Wenhao1,2
摘要:
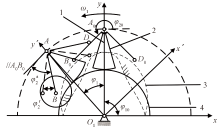
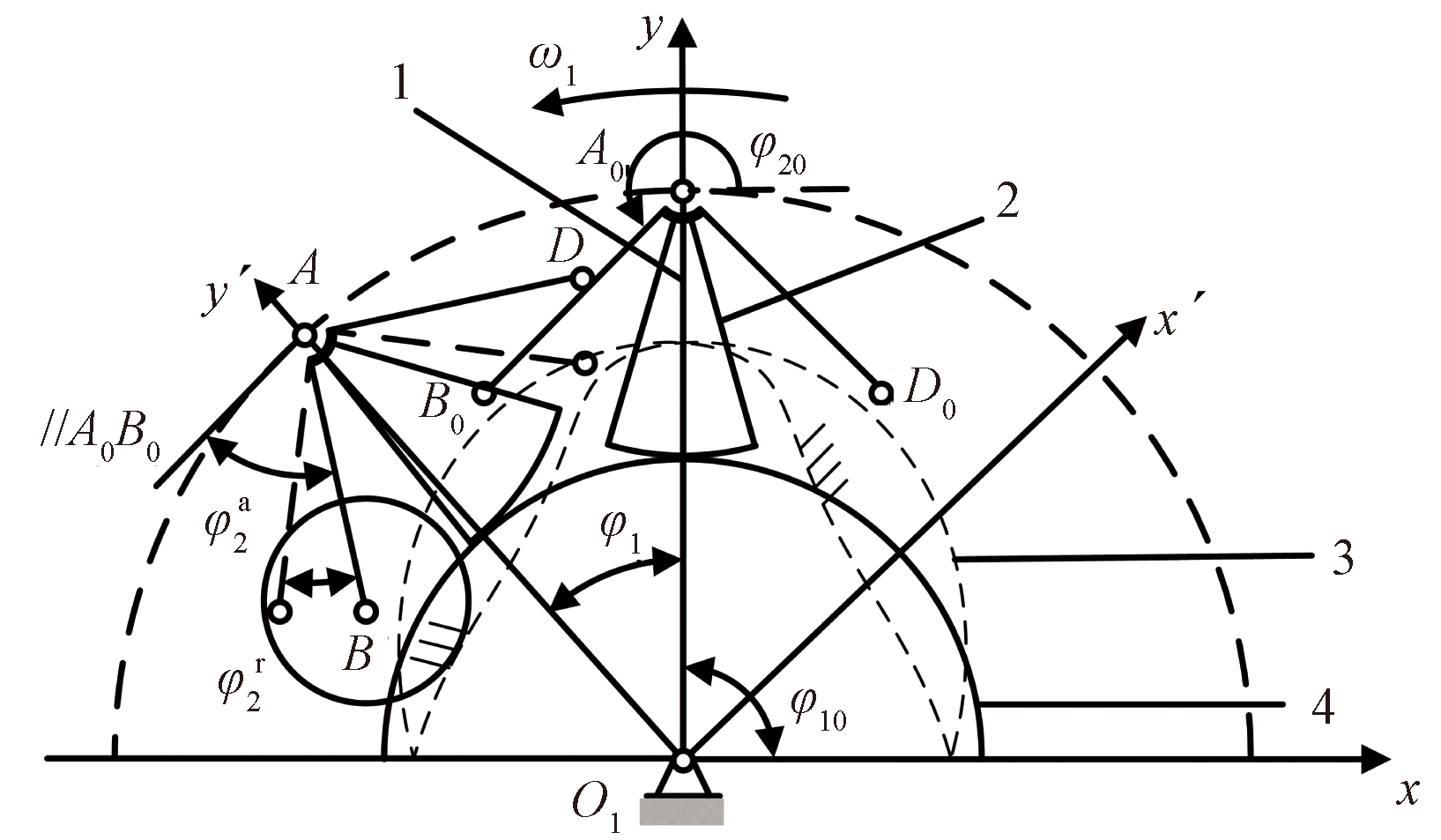
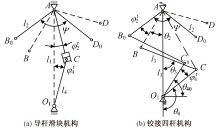
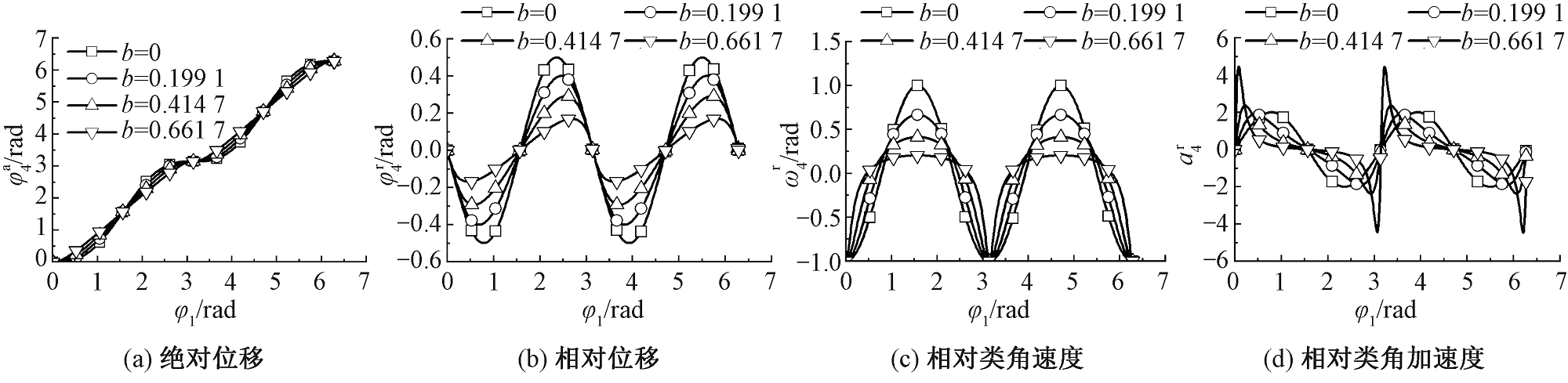
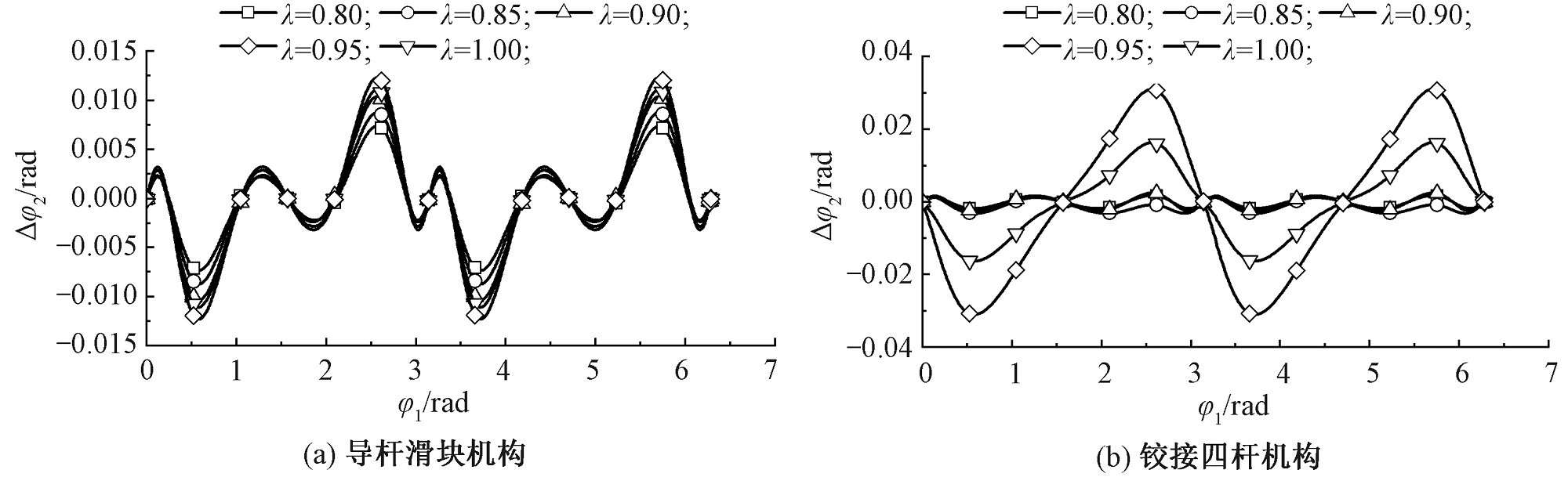
为满足织机开口运动停—升—停的工艺特性及其动力学性能,提出一种基于运动合成的旋转变速运动规律构造方法。从组合机构角度提出旋转变速运动驱动机构及其演变,建立不同驱动机构的相对运动传递函数模型。采用目标优化法对旋转变速机构尺寸参数进行设计,在相同的中心距半径和转子臂初始位置的情况下建立优化函数并进行求解。仿真结果表明:偏移系数是影响旋转变速运动的关键参数,且变速运动静止时间、相对位移和速度峰值随偏移系数增加而减小;传递函数是影响旋转变速机构运动特性的重要参数,当偏移系数为0.414 7时,随传动比的减小,转子臂相对位移减小,同时影响旋转变速机构凸轮特性,传动比大于0.9后不能满足旋转变速机构约束条件;用导杆滑块机构和铰接四杆机构对齿轮机构进行代换,可近似实现变速规律相对运动的传递,其传动误差分别为0.010、0.003 rad;通过减小中心距对铰接四杆机构重新优化可以提高旋转变速机构传动性能,满足高速运动需求。
中图分类号:
| [1] | FUMEX A, PAGES J P. Modulator mechanism for dobby:US, 5107901[P]. 1992-04-28. |
| [2] | HASÇELIK. Kinematics and dynamic analyzing of the rotary dobby with oscilating shaft moved inter-mittently[D]. Denizli: Pamukkale niversitesi, 2008: 28-79. |
| [3] | 沈毅, 高大牛, 刘春雷. 基于ADMAS 的GT421型多臂机机构动态仿真[J], 纺织学报, 2012, 33(8): 119-123. |
| SHEN Yi, GAO Daniu, LIU Chunlei. Dynamic simulation of mechanism of GT421 dobby based on ADMAS[J]. Journal of Textile Research, 2012, 33(8): 119-123. | |
| [4] | 周国庆, 龚文强, 袁汝旺, 等. 旋转式电子多臂提综机构运动特性分析[J]. 天津工业大学学报, 2019, 38(6): 58-62. |
| ZHOU Guoqing, GONG Wenqiang, YUAN Ruwang, et al. Kinematic characteristic analysis of rotary electronic dobby heald lifting mechanism[J]. Journal of Tiangong University, 2019, 38(6): 58-62. | |
| [5] | EREN Recep, ÖZKAN Gulcan, TURHAN Yidiray. Kinematics of rotary dobby and analysis of heald frame motion in weaving process[J]. Textile Research Journal, 2008, 78(12): 1070-1079. |
| [6] | EREN R, ÖZKAN G, KARAHAN M. Comparison of heald frame motion generated by rotary dobby and crank & cam shedding motions[J]. Fibres & Textiles in Eastern Europe, 2005, 13 (4):78-83. |
| [7] | WER X Y, JIN G, WEI Z, et al. Dynamics analysis of the rigid-flexible coupling comprehensive mechanism for a rotary dobby[J]. Mathematical Problems in Engineering, 2019, 2019(3): 1-14. |
| [8] | YIN Honghuan, YU Hongbin, WANG Lei. Kinematic comparison of a heald frame driven by a rotary dobby with a cam-slider, a cam-link and a null modulator[J]. Autex Research Journal, 2021, 21(3): 323-332. |
| [9] | 罗中华, 杨雨. 揉面机四杆机构的优化设计[J]. 机械设计2013, 30(6): 44-48. |
| LUO Zhonghua, YANG Yu. Optimization design of four bar mechanism of dough kneading machine[J]. Journal of Machine Design, 2013, 30(6): 44-48. | |
| [10] | ÖZGÜN Can, GABİL Abdulla. Design of a new rotary dobby mechanism[J]. Industria Textila, 2019, 69(6):429-433. |
| [11] |
袁汝旺, 祝雷雷, 吕雪奎, 等. 旋转多臂变速运动规律建模及其对开口机构传动影响[J]. 纺织学报, 2019, 40(12):127-133.
doi: 10.13475/j.fzxb.20181203707 |
|
YUAN Ruwang, ZHU Leilei, LÜ Xuekui, et al. Modeling of rotary shifting motion characteristics of electronic dobby and influence thereof on shedding mechanisms driving[J]. Journal of Textile Research, 2019, 40(12): 127-133.
doi: 10.13475/j.fzxb.20181203707 |
|
| [12] | GABIL A, GAMZE S, BILAL R, et al. Research of design's parameters of drive mechanism of RA14 dobby and development of the drive mechanism[J]. Annals of the University of Oradea Fascicle of Textiles Leatherwork, 2013, 14(1): 38-42. |
| [13] | SOONG Renchung. A design method for four-bar mechanisms with variable speeds and length-adjustable driving links[J]. Journal of Advanced Mechanical Design,Systems, and Manufacturing, 2009, 3(4): 312-323. |
| [14] | ABDULLA G, HASCELIK B, PALAMUTCU S, et al. Synthesis work about driving mechanism of a novel rotary dobby mechanism[J]. Tekstil ve Konfeksiyon, 2010, 20(3): 218-224. |
| [15] | HSIEH W. An experimental study on cam-controlled planetary gear trains[J]. Mechanism & Machine Theory, 2007, 42(5): 513-525. |
| [16] |
张远华, 苟向锋, 陈晓芳, 等. 电子多臂机旋转变速机构共轭凸轮再设计[J]. 机械传动, 2018, 42(4):57-61.
doi: 10.16578/j.issn.1004.2539.2018.04.012 |
|
ZHANG Yuanhua, GOU Xiangfeng, CHEN Xiaofang, et al. Re-design of conjugated cam for rotating variable speed mechanism of electronic dobby[J]. Journal of Mechanical Transmission, 2018, 42(4): 57-61.
doi: 10.16578/j.issn.1004.2539.2018.04.012 |
|
| [17] | 袁汝旺, 魏晓. 变速驱动下电子开口机构运动学建模及工艺优化[J]. 天津工业大学学报, 2023, 42(1):81-88. |
| YUAN Ruwang, WEI Xiao. Modeling and craft optimization of electronic shedding mechanism under variable speed drive[J]. Journal of Tiangong University, 2023, 42(1):81-88. | |
| [18] |
袁汝旺, 车一骋. 变速引纬规律驱动下剑带变长度非线性振动建模及其响应[J]. 纺织学报, 2022, 43(11):172-178.
doi: 10.13475/j.fzxb.20210800207 |
|
YUAN Ruwang, CHE Yicheng. Modeling and response of variable longitudinal nonlinear vibration of rapier belt driven by variable speed weft insertion pattern[J]. Journal of Textile Research, 2022, 43(11):172-178.
doi: 10.13475/j.fzxb.20210800207 |
|
| [19] | 季海彬, 周香琴, 成小军. 基于开口工艺要求的多臂机机构参数分析[J]. 浙江理工大学学报(自然科学版), 2016, 35(2): 205-210. |
| JI Haibin, ZHOU Xiangqin, CHENG Xiaojun. Analysis on mechanism parameters of dobby based on requirement of opening process[J]. Journal of Zhejiang Sci-Tech University(Natural Sciences Edition), 2016, 35 (2): 205-210. |
| [1] | 沈春娅, 方辽辽, 彭来湖, 梁汇江, 戴宁, 汝欣. 基于自适应模拟退火算法的整经准备车间排产模型[J]. 纺织学报, 2024, 45(03): 81-86. |
| [2] | 潘佳豪, 周其洪, 岑均豪, 李姝佳, 周申华. 服装企业包装订单分配排序优化模型及其快速非支配遗传算法求解[J]. 纺织学报, 2022, 43(05): 156-162. |
| [3] | 沈春娅, 雷钧杰, 汝欣, 彭来湖, 胡旭东. 基于改进型NSGAII的织造车间多目标大规模动态调度[J]. 纺织学报, 2022, 43(04): 74-83. |
| [4] | 郑小虎, 鲍劲松, 马清文, 周衡, 张良山. 基于模拟退火遗传算法的纺纱车间调度系统[J]. 纺织学报, 2020, 41(06): 36-41. |
| [5] | 莫帅, 冯战勇, 唐文杰, 党合玉, 邹振兴. 基于神经网络和遗传算法的锭子弹性管性能优化[J]. 纺织学报, 2020, 41(04): 161-166. |
| [6] | 袁汝旺, 祝雷雷, 吕雪奎, 杨佳敏. 旋转多臂变速运动规律建模及其对开口机构传动影响[J]. 纺织学报, 2019, 40(12): 127-133. |
| [7] | 孟朔, 潘如如, 高卫东, 王静安, 周利军. 采用主目标进化遗传算法的织造排程研究[J]. 纺织学报, 2019, 40(08): 169-174. |
| [8] | 黄双 郗欣甫 徐洋 孙以泽. 簇绒地毯织机耦联轴系的铰链间隙对毯面绒高的影响[J]. 纺织学报, 2016, 37(08): 132-137. |
|
||
 京公网安备11010502044800号
京公网安备11010502044800号