纺织学报 ›› 2019, Vol. 40 ›› Issue (10): 177-182.doi: 10.13475/j.fzxb.20180903406
周虎( ), 刘涛, 高金杰, 周强, 罗滨鸿, 游政, 苏炳望, 巴拉
), 刘涛, 高金杰, 周强, 罗滨鸿, 游政, 苏炳望, 巴拉
ZHOU Hu(), LIU Tao, GAO Jinjie, ZHOU Qiang, LUO Binhong, YOU Zheng, SU Bingwang, BA La
摘要:
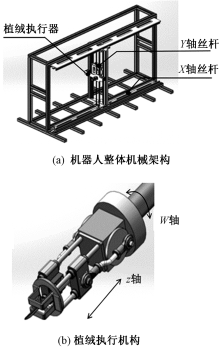
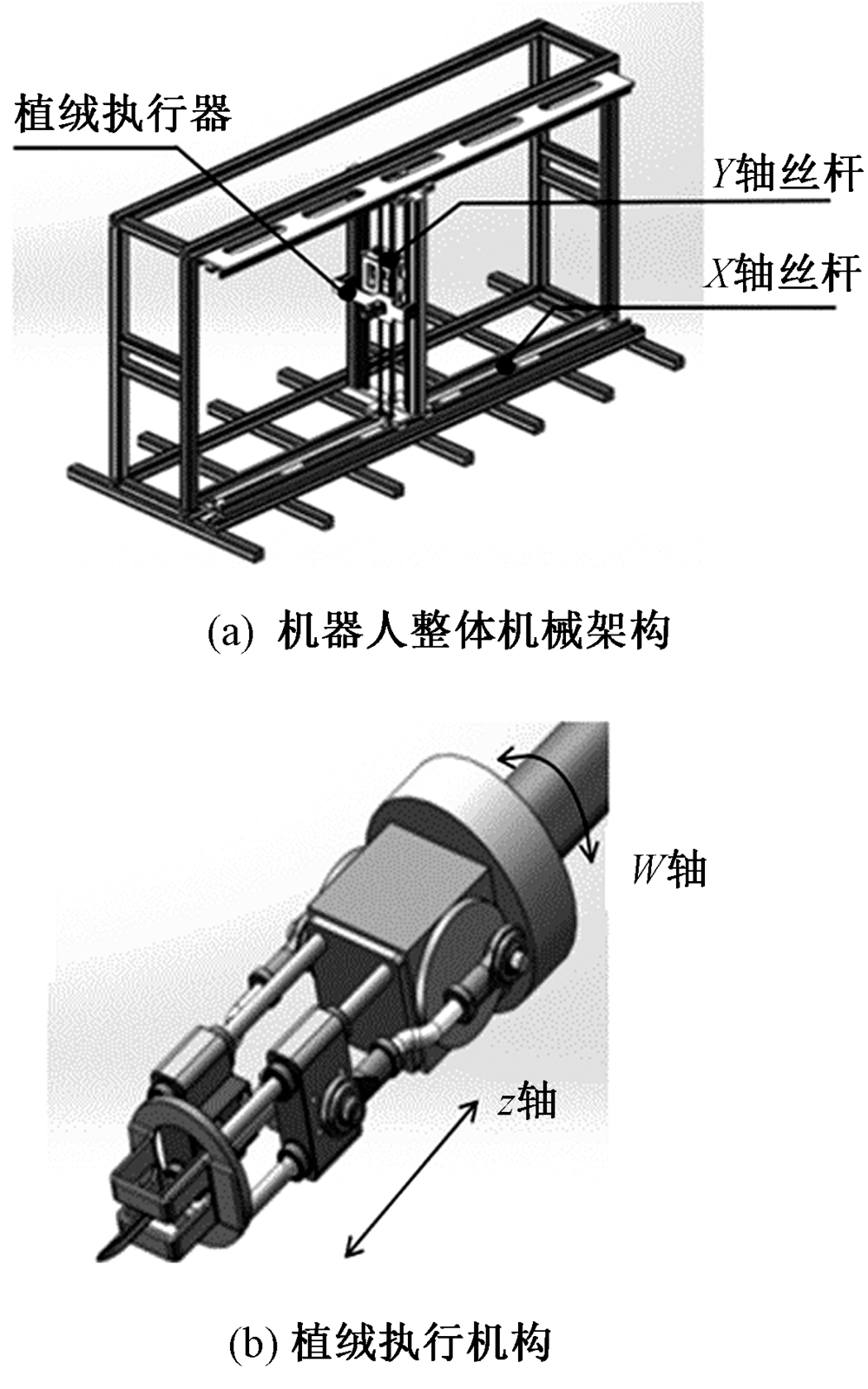
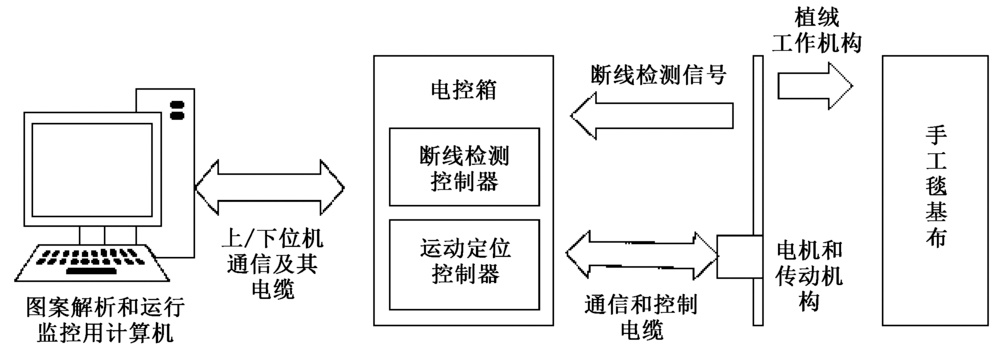
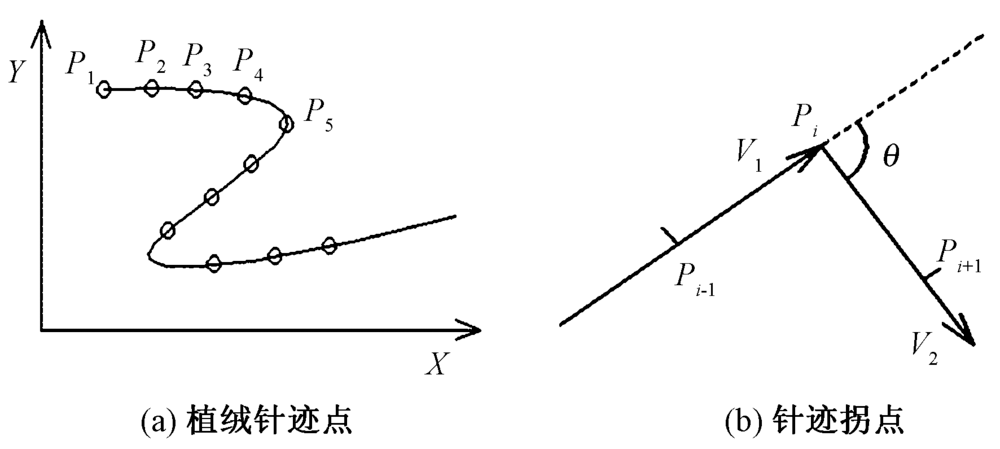
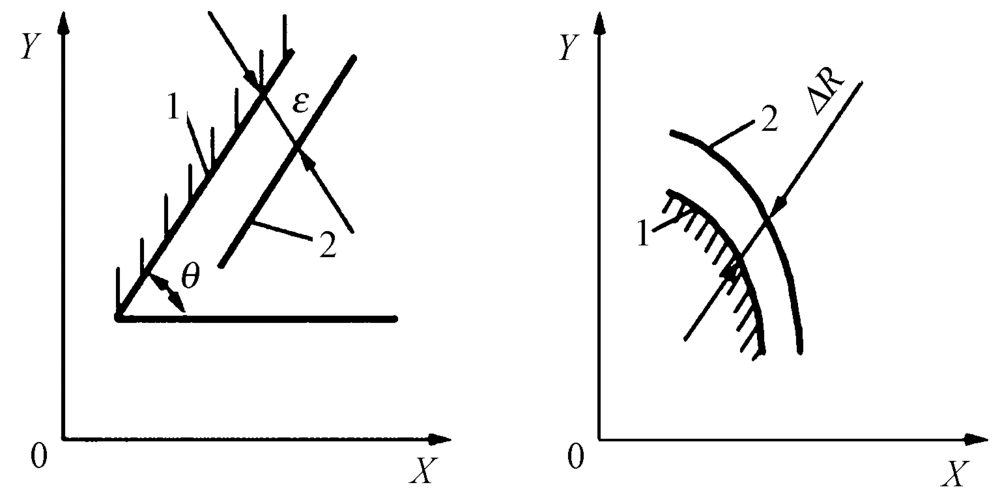
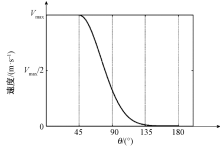
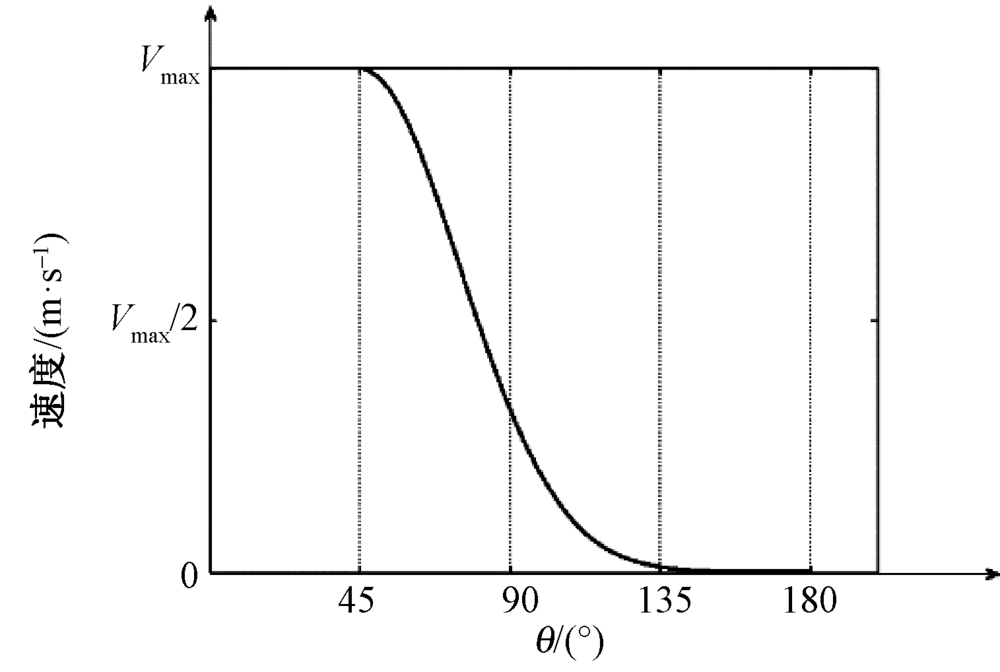
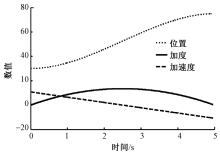
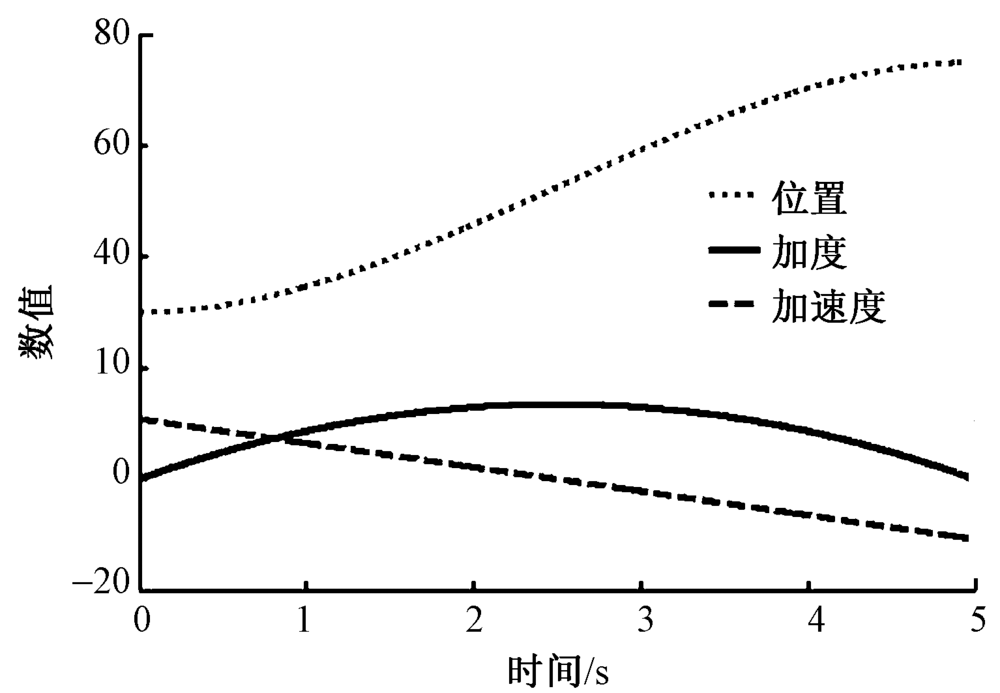
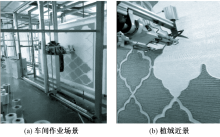
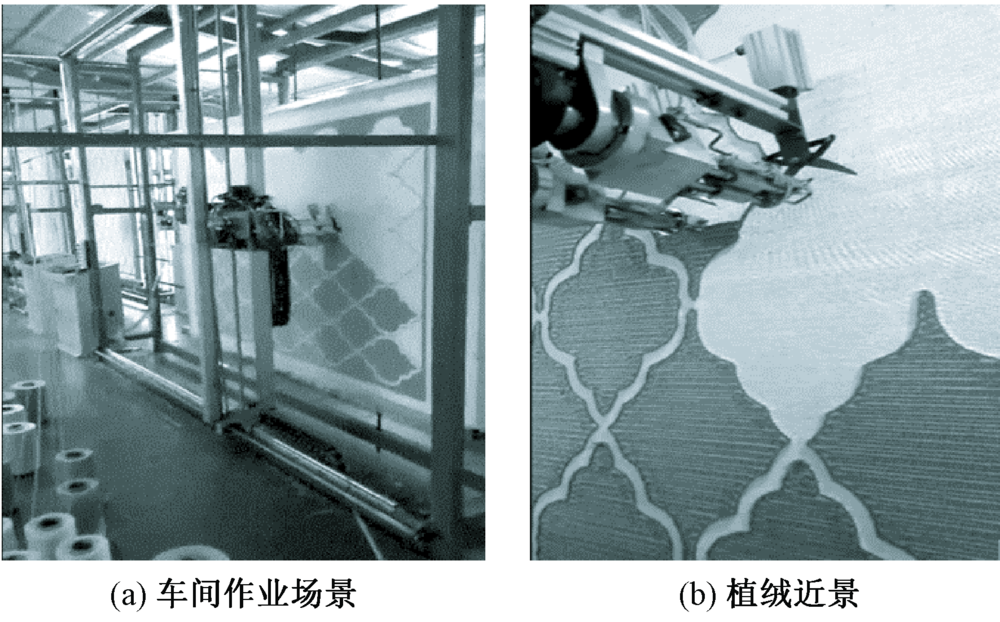
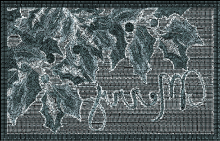
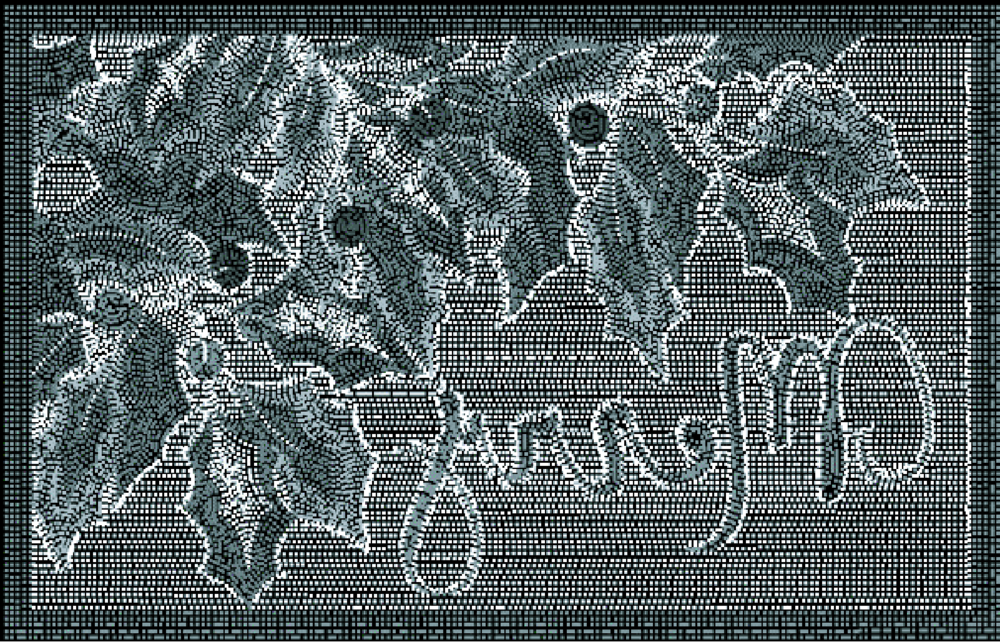
为减缓手工地毯植绒机在加工路径变化剧烈处引起的机械振动,减少植绒路径和基布偏移,使其在较高作业速度下加工出高品质毯面的手工地毯,提出一种手工地毯植绒轨迹规划和速度优化控制方法。通过分析手工地毯植绒机器人的机电系统架构,以及实现植绒动作的多轴联动关系;在此基础上研究了运动路径对机械振动和植绒精度的影响,提出了根据拐点转角大小的速度自适应控制策略;最后研究了三次样条函数轨迹规划器实现多轴系统的协调运动控制方法。结果表明:应用该优化控制方法较好地抑制了加工中的机械振动,实测路径最大偏移量从5.8 mm下降到0.6 mm,在保证毯面品质的基础上提升了植绒效率。
中图分类号:
| [1] | 晓婷. 我国地毯发展历史及特点[J]. 中国纤检, 2011(6):86. |
| XIAO Ting. The history and characteristics of China's carpet development[J]. China Fiber Inspection, 2011(6):86. | |
| [2] |
BILGIN M H, DEMIR E, LAU M C K, et al. The Turkish handmade carpet industry[J]. Journal of The Textile Institute, 2011,102(6):514-526.
doi: 10.1080/00405000.2010.498171 |
| [3] | 钱志鹏, 孟婥, 左硕. 电动地毯织枪机构分析[J]. 纺织学报, 2016,37(11):136-140. |
|
QIAN Zhipeng, MENG Zhuo, ZUO Shuo. Analysis on mechanical structure of electric tufting gun[J]. Journal of Textile Research, 2016,37(11):136-140.
doi: 10.1177/004051756703700209 |
|
| [4] | TOPALBEKIROGLU M. Kinematic analysis and synjournal of the knotting mechanisms can be used in the production of handmade carpet[J]. Journal of Mechanical Engineering Science, 2005,219(9):987-1005. |
| [5] | 吴飞, 刘潇, 高尚, 等. 二轴伺服系统轮廓误差的控制研究[J]. 组合机床与自动化加工技术, 2017(5):81-84. |
| WU Fei, LIU Xiao, GAO Shang, et al. Study on contour error control of two-axis servo system[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2017(5):81-84. | |
| [6] | 侯昱明. 跟随误差或轮廓监控报警研究与解除思路[J]. 中国重型装备, 2018(4):20-22,52. |
| HOU Yuming. Follow error or contour monitoring alarm research and remove ideas[J]. China Heavy Equipment, 2018(4):20-22,52. | |
| [7] | 李文广, 马世国, 高淑芳. 一种高速加工中速度前瞻规划算法[J]. 机床与液压, 2018,46(20):166-169. |
| LI Wenguang, MA Shiguo, GAO Shufang. A speed forward planning algorithm for high speed machining[J]. Machine Tool & Hydraulics, 2018,46(20):166-169. | |
| [8] | 郎志. 多轴联动伺服系统定位末端抖振抑制技术[D]. 哈尔滨:哈尔滨工业大学, 2017: 3-6. |
| LANG Zhi. Chattering suppression technology of multi - axis linkage servo system positioning end[D]. Harbin: Harbin Institute of Technology, 2017: 3-6. | |
| [9] | 刘宜. 多轴轮廓运动系统的轨迹生成与性能优化[D]. 合肥:中国科学技术大学, 2008: 5-7. |
| LIU Yi. Trajectory generation and performance optimization of multi-axis contour motion system[D]. Heifei: University of Science and Technology of China, 2008: 5-7. | |
| [10] |
ARHIN S, ESKANDARIAN A, BLUM J, et al. Development and evaluation of an advanced intelligent speed adaptation system[J]. Journal of Automobile Engineering, 2008,222(9):1603-1614.
doi: 10.1243/09544070JAUTO797 |
| [11] | 徐文霞, 黄剑, 晏箐阳. 兼具柔顺与安全的助行机器人运动控制研究[J]. 自动化学报, 2016,42(12):1859-1873. |
| XU Wenxia, HUANG Jian, YAN Qingyang. Research on walking-aid robot motion control with both compliance and safety[J]. Acta Automatic Sinica, 2016,42(12):1859-1873. | |
| [12] |
YEH S S, HSU P L. Adaptive-feedrate interpolation for parametric curves with a confined chord error[J]. CAD Computer Aided Design, 2002,34(3):229-237.
doi: 10.1016/S0010-4485(01)00082-3 |
| [1] | 戴宁, 胡旭东, 彭来湖. 针织大圆机运动实时控制技术[J]. 纺织学报, 2019, 40(12): 134-139. |
| [2] | 李伟锋, 孙启晓, 李想. 新型土工布胀破性能测试系统的研制[J]. 纺织学报, 2012, 33(7): 129-133. |
| [3] | 徐巧;梅顺齐;张智明. 基于PCI总线的伺服导纱系统的研制[J]. 纺织学报, 2009, 30(02): 109-111. |
|
||
 京公网安备11010502044800号
京公网安备11010502044800号