纺织学报 ›› 2021, Vol. 42 ›› Issue (01): 190-196.doi: 10.13475/j.fzxb.20200405507
• 综合述评 • 上一篇
刘汉邦1,2, 李新荣1,2( ), 刘立东1,2
), 刘立东1,2
LIU Hanbang1,2, LI Xinrong1,2(), LIU Lidong1,2
摘要:
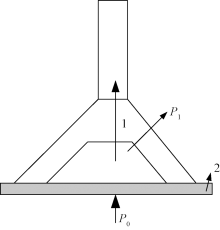
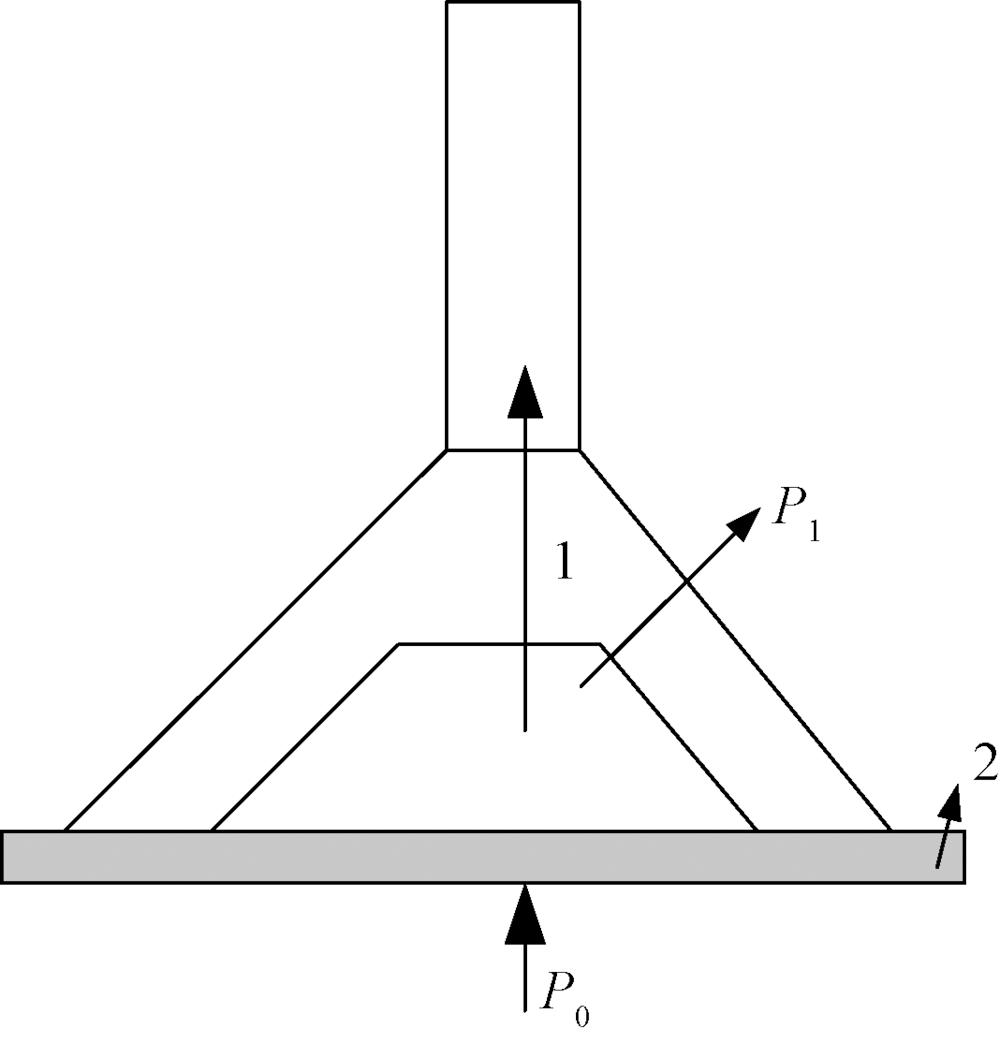
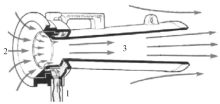
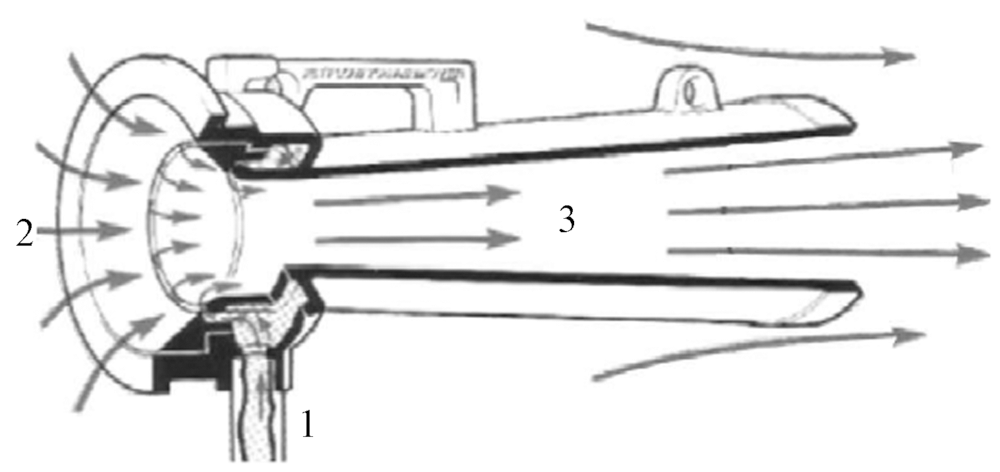
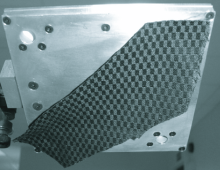
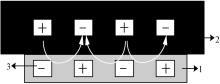
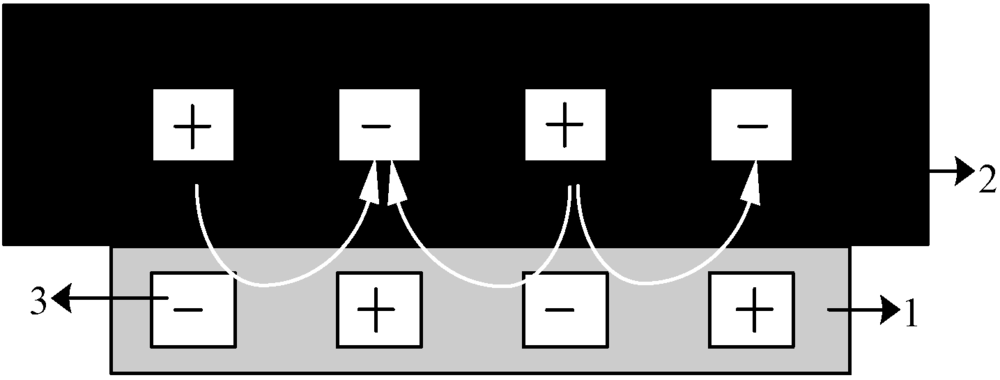
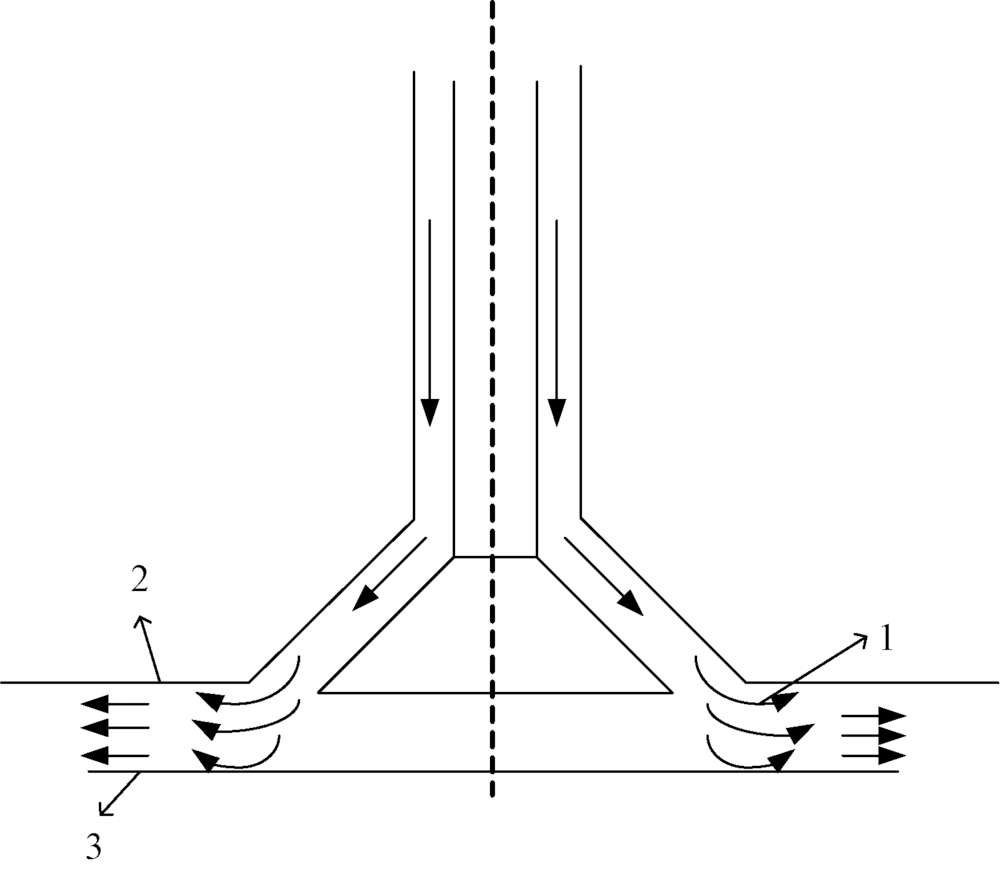
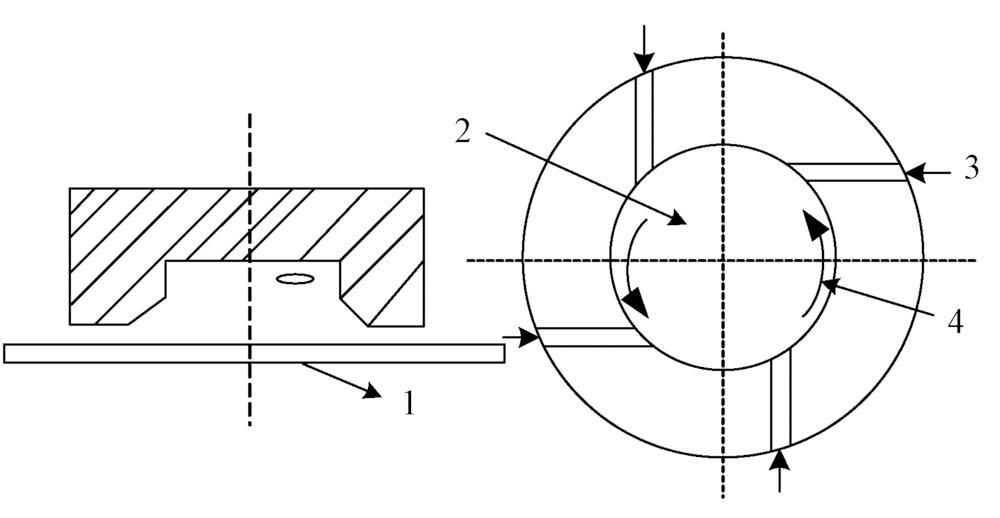
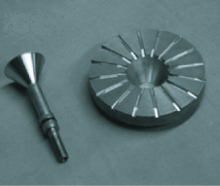
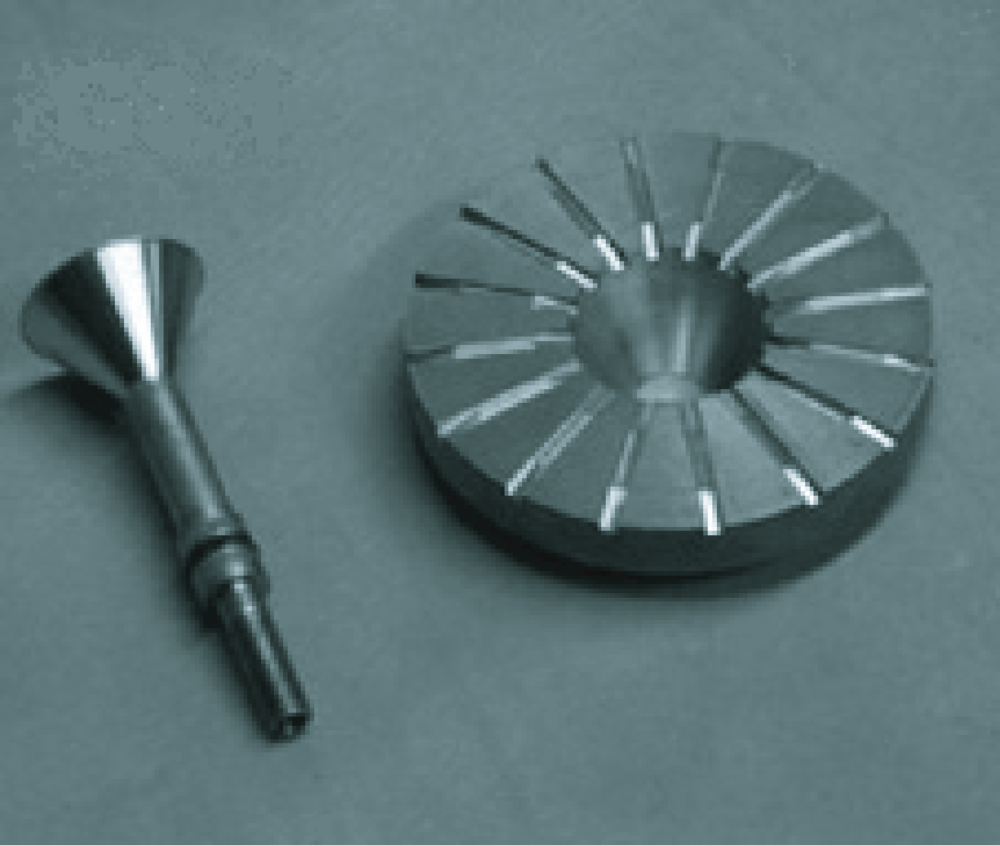
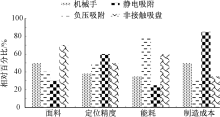
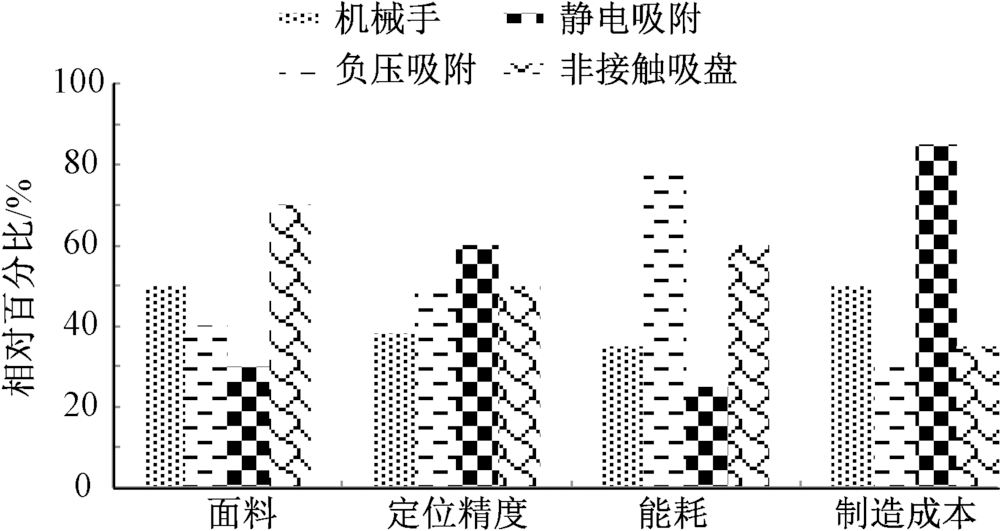
为更好地促进纺织服装设备自动化和面料自动抓取方法的融合发展,解决劳动力成本过高、生产效率低和服装定制化发展缓慢等问题。分析了目前服装面料自动抓取转移方法的研究现状,讨论了机械手抓取、负压吸盘抓取、静电吸附抓取和非接触式吸盘抓取的原理与特点及其对服装生产的影响,对比了上述4种自动抓取转移方式在制造成本、能耗、工作环境和定位精度等方面的优劣。研究认为非接触吸盘与其他3种自动抓取转移方式相比,具有更广阔的应用前景。并展望了服装面料自动抓取转移方法的未来发展趋势,以期共同推进服装行业自动化、定制化生产等相关产业的升级。
中图分类号:
| [1] | KOUSTOUMPARDIS N. A 3-finger robotic gripper for grasping fabrics based on cams-followers mechan-ism [C]//SMYRNIS S, ASPRAGATHOS N A. Advances in Service and Industrial Robotics. Berlin: Springer Cham, 2017: 612-620. |
| [2] | BIGANZOLI F, FANTONI G. A self-centering electrostatic microgripper[J]. Journal of Manufacturing Systems, 2008,27(3):136-144. |
| [3] | SUN B. A new electrostatic gripper for flexible handling of fabrics in automated garment manufacturing [C]//ZHANG X Y. 2019 IEEE 15th International Conference on Automation Science and Engineering (CASE). Vancouver: IEEE Computer Society, 2019: 879-884. |
| [4] | FANTONI G, SANTOCHI M, DINI G, et al. Grasping devices and methods in automated production proce-sses[J]. CIRP Annals-Manufacturing Technology, 2014,63(2):679-701. |
| [5] | DAVIS S, GRAY J O, CALDWELL D G. An end effector based on the Bernoulli principle for handling sliced fruit and vegetables[J]. Robotics & Computer Integrated Manufacturing, 2008,24(2):249-257. |
| [6] | 耿蕊. 一种简易型伯努利吸盘: 201810033484.8 [P]. 2018 -05-25. |
| GENG Rui. A simple Bernoulli sucker: 201810033484.8[P]. 2018 -05-25. | |
| [7] | FANTONI G. Method for supporting the selection of robot grippers [C]// CAPIFERRI S, TILLI J. 24th CIRP Design Conference 2014: Mass Customization and Personalization. Amsterdam: Elsevier Ltd, 2014: 330-335. |
| [8] | FANTONI G, GABELLONI D, TILLI J. Concept design of new grippers using abstraction and analogy[J]. Proceedings of the Institution of Mechanical Engineers, 2013,227(10):1521-1532. |
| [9] | 张楠, 何玉成, 王南. 操作机器人机械手爪的设计研究及应用[J]. 机械设计, 2013,30(3):17-20,61. |
| ZHANG Nan, HE Yucheng, WANG Nan. Design study and application of manipulating robot gripper[J]. Journal of Machine Design, 2013,30(3):17-20,61. | |
| [10] | 刘晓敏, 徐斌, 赵云伟, 等. 气动仿人柔性灵巧手工作空间分析与抓取实验[J]. 机床与液压, 2019,47(15):24-28. |
| LIU Xiaomin, XU Bin, ZHAO Yunwei, et al. Workspace analysis and grasp experiment of pneumatic humanoid flexible robot hand[J]. Machine Tool & Hydraulics, 2019,47(15):24-28. | |
| [11] | YUBA H, ARNOLD S, YAMAZAKI K. Unfolding of a rectangular cloth from unarranged starting shapes by a Dual-Armed robot with a mechanism for managing recognition error and uncertainty[J]. Advanced Robotics, 2017: 544-556. |
| [12] |
MORIYA Y, TANAKA D, YAMAZAKI K, et al. A method of picking up a folded fabric product by a single-armed robot[J]. Robomech Journal, 2018,5(1):1-12.
pmid: 19971328 |
| [13] | DEMURA S. Picking up one of the folded and stacked towels by a single arm robot [C]// SANO K, NAKAJIMA W, NAGAHAMA K, et al. 2018 IEEE International Conference on Robotics and Biomimetics (ROBIO). PA: IEEE, 2018: 1551-1556. |
| [14] | NAGATA K. Picking up a towel by cooperation of functional finger actions [C]// YAMANOBE N. 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems. Vancouver: IEEE Computer Society, 2009: 1785-1790. |
| [15] | 刘培炎, 吴松, 付荣华, 等. 柔性机械手抓取能力影响因素的研究[J]. 机械制造, 2017,55(2):6-9,12. |
| LIU Peiyan, WU Song, FU Ronghua, et al. Research on influencing factors of grabbing capability of flexible manipulators[J]. Machinery Manufacturing, 2017,55(2):6-9,12. | |
| [16] |
LEE J H, CHUNG Y S, RODRIGUE H. Long shape memory alloy tendon-based soft robotic actuators and implementation as a soft gripper[J]. Scientific Reports, 2019,9(1):1-12.
pmid: 30626917 |
| [17] | GLICK P, SURESH S A, RUFFATTO D, et al. A soft robotic gripper with gecko-inspired adhesive[J]. IEEE Robotics and Automation Letters, 2018,3(2):903-910. |
| [18] | AUTUMN K, SITTI M, LIANG Y A, et al. Evidence for van der waals adhesion in gecko setae[J]. Proceedings of the National Academy of Sciences, 2002,99(19):12252-12256. |
| [19] | 陈幸, 郭钟华, 李小宁, 等. 颗粒物塑形负压吸盘的设计与研究[J]. 液压与气动, 2019(2):123-126. |
| CHEN Xing, GUO Zhonghua, LI Xiaoning, et al. Design and study on negative vacuum pad for jamming particle shaping[J]. Hydraulic and Pneumatic, 2019 (2):123-126. | |
| [20] | 程玉华, 袁艳芳, 潘越. 玻璃壁面清洗机器人负压吸附系统的研究[J]. 科技创新与应用, 2017(16):54-55. |
| CHENG Yuhua, YUAN Yanfang, PAN Yue. Research on negative pressure adsorption system of glass wall cleaning robot[J]. Science and Technology Innovation and Application, 2017(16):54-55. | |
| [21] | FAILLI F, DINI G. An innovative approach to the automated stacking and grasping of leather plies[J]. CIRP Annals-Manufacturing Technology, 2004,53(1):31-34. |
| [22] | CUBRIC G, SALOPEK C I. Study of grippers in automatic handling of nonwoven material[J]. Journal of the Institution of Engineers (India): Series E, 2019,100(2):167-173. |
| [23] | LIEN T K, DAVIS P G G. A novel gripper for limp materials based on lateral Coanda ejectors[J]. CIRP Annals-Manufacturing Technology, 2008,57(1):33-36. |
| [24] | FLEISCHER J, FÖRSTER F, CRISPIERI N V, et al. Intelligent gripper technology for the handling of carbon fiber material[J]. Production Engineering, 2014,8(6):691-700. |
| [25] | ASANO K. Fundamental study of an electrostatic chuck for silicon wafer handling [C]// HATAKEYAMA F, YATSUZUKA K. Proceedings of the 1997 IEEE Industry Applications Conference 32nd IAS Annual Meeting. PA: IEEE, 1997: 1998-2003. |
| [26] | 黄之峰. 面向壁面移动机器人的静电吸附机理研究[D]. 哈尔滨:哈尔滨工业大学, 2010: 11-12. |
| HUANG Zhifeng. Research on electrostatic adsorption mechanism for wall-clinmbing robot[D]. Harbin: Harbin Institute of Technology, 2010: 11-12. | |
| [27] | 黄之峰, 王鹏飞, 李满天, 等. 基于柔性静电吸附技术的爬壁机器人研究[J]. 机械设计与制造, 2011(6):166-168. |
| HUANG Zhifeng, WANG Pengfei, LI Mantian, et al. Study on wall-climbing robot based on flexible electrostatic attraction technique[J]. Mechanical Design and Manufacturing, 2011(6):166-168. | |
| [28] | KOH K H. Modeling and simulation of electrostatic adhesion for wall climbing robot [C]// KUPPAN C R M, PONNAMBALAM S G. 2011 IEEE International Conference on Robotics and Biomimetics. Vancouver: IEEE Computer Society, 2011: 2031-2036. |
| [29] | SCHALER E W. An electrostatic gripper for flexible objects [C]// RUFFATTO D, GLICK P, WHITE V, et al. 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems. PA: IEEE, 2017: 1172-1179. |
| [30] | 刘斌. 一种透明静电吸盘:201822072469.2[P]. 2019 -09-10. |
| LIU Bin. A transparent electrostatic chuck:201822072469.2[P]. 2019 -09-10. | |
| [31] | REINHART G, HOEPPNER J. Non-contact handling using high-intensity ultrasonics[J]. CIRP Annals-Manufacturing Technology, 2000,49(1):5-8. |
| [32] | SAITO S, SODA F, DHELIKA R, et al. Compliant electrostatic chuck based on hairy microstructure[J]. Smart Materials and Structures, 2013,22(1):15-19. |
| [33] | ZHANG Z W. Modeling and analysis of electrostatic force for robot handling of fabric materials[J]. IEEE/ASME Transactions on Mechatronics, 1999,4(1):39-49. |
| [34] | 刘旭. 一种多功能无尘车间净化设备: 201711002302.2 [P]. 2018 -03-23. |
| LIU Xu. A multifunctional dust-free workshop purification equipment: 201711002302.2 [P]. 2018 -03-23. | |
| [35] | 邹明明, 李小宁, 滕燕. 非接触式真空吸取动态过程试验研究[J]. 液压与气动, 2011(3):108-111. |
| ZOU Mingming, LI Xiaoning, TENG Yan. Research on the dynamic process of non-contact vacuum levita-tion[J]. Hydraulic and Pneumatic, 2011(3):108-111. | |
| [36] | LI X, IIO S, KAWASHIMA K, et al. Computational fluid dynamics study of a noncontact handling device using air-swirling flow[J]. Journal of Engineering Mechanics, 2011,137(6):400-409. |
| [37] | IDLOVSKÁ L, TULEJA P. Analysis of flow rates in the design of effector for unilateral gripping with active vacuum suction cup[J]. Applied Mechanics and Materials, 2014,613:304-309. |
| [38] | OZCELIK B, ERZINCANLI F. Examination of the movement of a woven fabric in the horizontal direction using a non-contact end-effector[J]. The International Journal of Advanced Manufacturing Technology, 2005,25(5/6):527-532. |
| [39] | DAVIS S, GRAY J O, CALDWELL D G. An end effector based on the Bernoulli principle for handling sliced fruit and vegetables[J]. Robotics and Computer Integrated Manufacturing, 2006,24(2):249-257. |
| [40] | IIO S, UMEBACHI M, LI X, et al. Performance of a non-contact handling device using swirling flow with various gap height[J]. Journal of Visualization, 2010,13(4):319-326. |
| [41] | LI X, KAWASHIMA K, KAGAWA T. Analysis of vortex levitation[J]. Experimental Thermal and Fluid Science, 2008,32(8):1448-1454. |
| [42] | LI X, KAGAWA T. Development of a new noncontact gripper using swirl vanes[J]. Robotics and Computer Integrated Manufacturing, 2013,29(1):63-70. |
| [43] | DINI G, FANTONI G, FAILLI F. Grasping leather plies by Bernoulli grippers[J]. CIRP Annals - Manufacturing Technology, 2009,58(1):21-24. |
| [44] | OZCELIK B, ERZINCANLI F. A non-contact end-effector for the handling of garments[J]. Robotica, 2002,20(4):447-450. |
| [45] | ZHANG T. Integration of thermoresponsive velcro-like adhesive for soft robotic grasping of fabrics or smooth surfaces [C]//LIANG T, YUE X, SAMEOTO D. 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft). PA: IEEE, 2019: 120-125. |
| [46] | CUBRIC G, NIKOLIC G, 吴丽霞. 应用于转移针织物的真空握持器[J]. 国际纺织导报, 2014,42(4):27-28. |
| CUBRIC G, NIKOLIC G, WU Lixia. Applying the vacuum gripper for knitted fabric transfer[J]. Melliand China, 2014,42(4):27-28. | |
| [47] | SMIRNOV I V, SPRINGHETTI R, MOROZOV V A, et al. Experimental analysis on electrical breakdown of acrylic VHB tape under quasi-static and pulsed voltage[J]. Technical Physics, 2018,63(1):152-154. |
| [48] | 李剑锋, 梁冬泰, 路波, 等. 非接触搬运吸盘系统研究[J]. 仪器仪表学报, 2018,39(10):108-116. |
| LI Jianfeng, LIANG Dongtai, LU Bo, et al. Research on non-contact handling sucker system[J]. Chinese Journal of Scientific Instrument, 2018,39(10):108-116. |
| [1] | 钟文鑫 冒海文 岳亚丹 仲柏俭 张新杰 喻颖 马丕波. 经编结构静电阻隔织物的设计与开发[J]. 纺织学报, 2017, 38(02): 106-110. |
| [2] | 钱幺 赵宝宝 钱晓明. 强制静电下导电滤料的过滤效率[J]. 纺织学报, 2016, 37(12): 55-59. |
|
||
 京公网安备11010502044800号
京公网安备11010502044800号