纺织学报 ›› 2021, Vol. 42 ›› Issue (11): 173-178.doi: 10.13475/j.fzxb.20200605706
王晓华( ), 王育合, 张蕾, 王文杰
), 王育合, 张蕾, 王文杰
WANG Xiaohua(), WANG Yuhe, ZHANG Lei, WANG Wenjie
摘要:
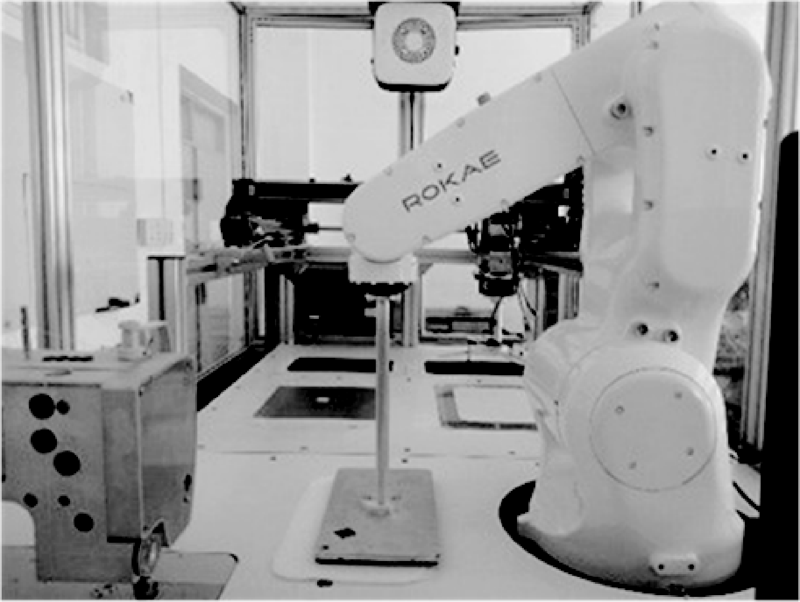
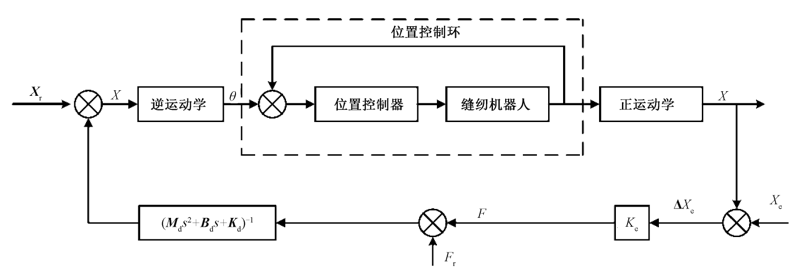
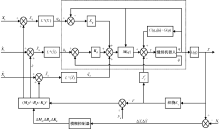
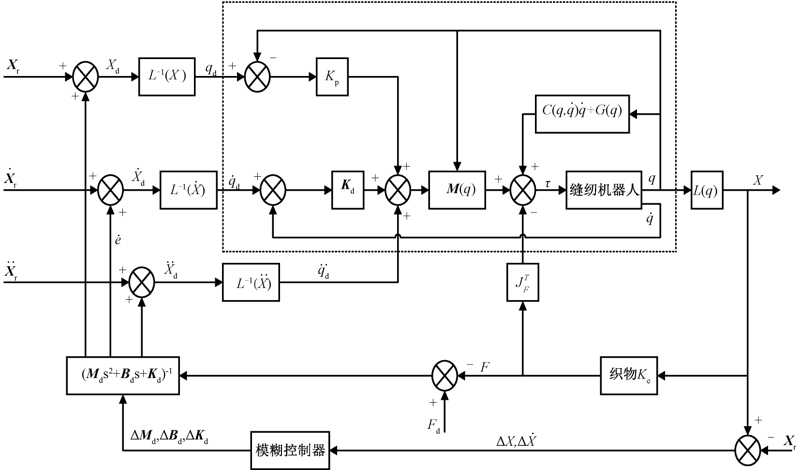
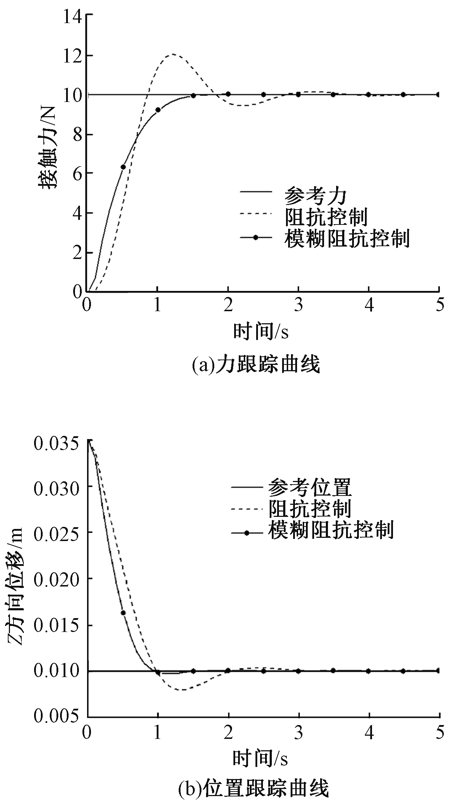
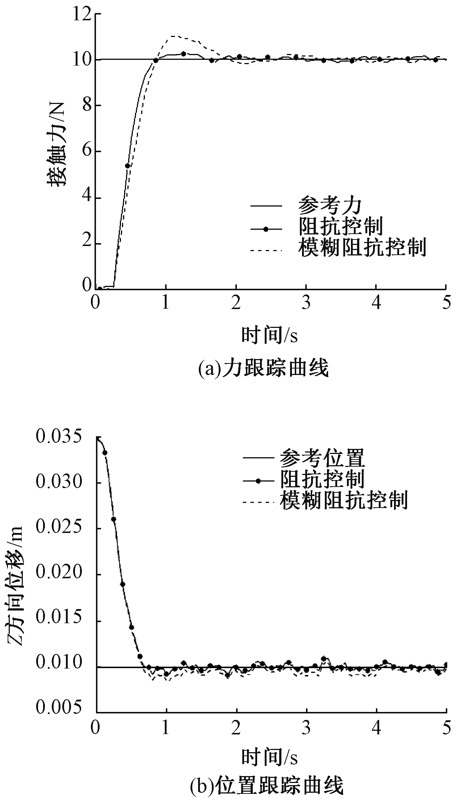
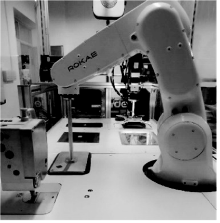
为解决缝纫机器人末端执行器在按压织物滑动前行和按压织物缝纫时需要保证织物不起褶皱且缝纫轨迹针脚均匀的问题,采用模糊阻抗控制方法对机器人末端位置以及机器人末端与织物接触力的同时控制。建立缝纫机器人实际缝纫系统模型,采取将机器人末端按压织物的力与按压位置进行力/位阻抗控制的策略,并根据模糊规则选取了缝纫系统最优阻抗参数。实验结果表明:模糊阻抗控制方法能够实现机器人操作织物的位置和机器人末端按压织物操作力之间的动态平衡,能够在保证机器人各关节平稳运动的基础上实现缝纫时接触力和位置的同时控制要求。
中图分类号:
| [1] | 丁敏. 缝纫机器人带来的机遇和挑战[J]. 中国纤检, 2018(2):124-125. |
| DING Min. Opportunities and challenges brought by sewing robots[J]. China Fiber Inspection, 2018(2):124-125. | |
| [2] | PANAGIOTIS N, KOUSTOUMPARDIS N, NIKOS A. Intelligent hierarchical robot control for sewing fabrics[J]. Robotics and Computer Integrated Manufacturing, 2014(30):34-46. |
| [3] | 高强, 潘俊, 李震. 面向软面料自主抓取的机器人视觉检测与定位[J]. 计算机测量与控制, 2019, 27(7):20-24. |
| GAO Qiang, PAN Jun, LI Zhen. Visual detection and localization of robots' grasps automatically on soft fabric[J]. Computer Measurement & Control, 2019, 27(7):20-24. | |
| [4] |
MARIOLIS I G, DERMATAS E S. Automated assessment of textile seam quality based on surface roughness estimation[J]. Journal of The Textile Institute, 2010, 101(7):653-659.
doi: 10.1080/00405000902732883 |
| [5] | KOUSTOUMPARDIS P N, ASPRAGATHOS N A. Fuzzy logic decision mechanism combined with a neuro-controller for fabric tension in robotized sewing process[J]. Journal of Intelligent & Robotic Systems Theory & Applications, 2003, 36(1):65-88. |
| [6] | DIMITRA T, PANAGIOTIS N, KOUSTOUMPARDIS, et al. Model reference fuzzy learning force control for robotized sewing [C]//19th Mediterranean Conference on Control and Automation. Corfu: IEEE, 2011: 1460-1465. |
| [7] |
SHIRIN Y, JUAN D, THOMAS B. Trajectory adaptation for an impedance controlled cooperative robot according to an operator's force[J]. Automation in Construction, 2019, 103:213-220.
doi: 10.1016/j.autcon.2019.01.006 |
| [8] |
LU X, ZHAO Y, LIU M. Self-learning interval type-2 fuzzy neural network controllers for trajectory control of a delta parallel robot[J]. Neurocomputing, 2018, 28(3):107-119.
doi: 10.1016/S0925-2312(98)00118-0 |
| [9] | JOHANNES S, MAGNUS B, GEIR M. Velocity coordination and corner matching in a multi-robot sewing cell [C]//IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS 2014). Chicago: IEEE, 2014: 4476-4481. |
| [10] | KUDO M, NASU Y, MITOBE K, et al. Multi-arm robot control system for manipulation of flexible materials in sewing operation[J]. Mechatronics, 2000, 103:371-402. |
| [11] | 张建军, 刘卫东, 李乐, 等. 未知环境下水下机械手智能抓取的自适应阻抗控制[J]. 上海交通大学学报, 2019, 53(3):341-347. |
| ZHANG Jianjun, LIU Weidong, LI Le, et al. Adaptive impedance control for underwater manipulator intelligent grasping in unknown environment[J]. Journal of Shanghai Jiaotong University, 2019, 53(3):341-347. | |
| [12] | 杨贻俊, 侯明. 基于模糊微分先行PID的直线电机控制研究[J]. 电工技术, 2019(18):3-6. |
| YANG Yijun, HOU Ming. Research on linear motor control based on fuzzy differential forward PID[J]. Electric Engineering, 2019(18):3-6. |
| [1] | 王晓华, 姚炜铭, 王文杰, 张蕾, 李鹏飞. 基于改进YOLO深度卷积神经网络的缝纫手势检测[J]. 纺织学报, 2020, 41(04): 142-148. |
| [2] | 徐 磊;王 瑞;张淑洁. Ni-Ti形状记忆合金纤维相变的电阻特性[J]. 纺织学报, 2010, 31(3): 15-19. |
|
 京公网安备11010502044800号
京公网安备11010502044800号