纺织学报 ›› 2022, Vol. 43 ›› Issue (03): 160-167.doi: 10.13475/j.fzxb.20210402708
莫帅1,2( ), 周长鹏1, 李旭1, 杨振宁1, 刘辉华3, 高瀚君4
), 周长鹏1, 李旭1, 杨振宁1, 刘辉华3, 高瀚君4
MO Shuai1,2(), ZHOU Changpeng1, LI Xu1, YANG Zhenning1, LIU Huihua3, GAO Hanjun4
摘要:
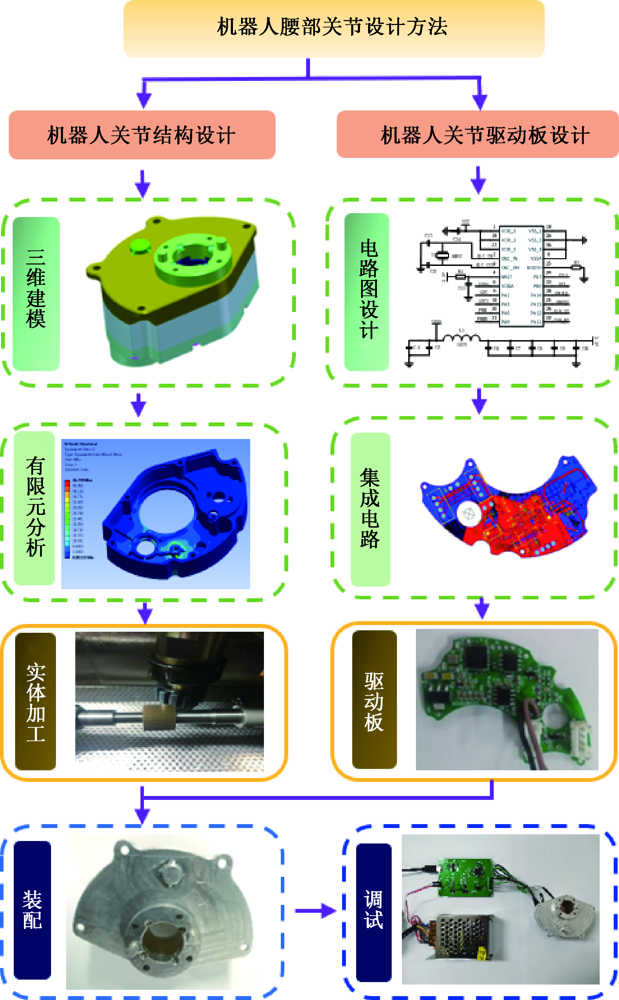
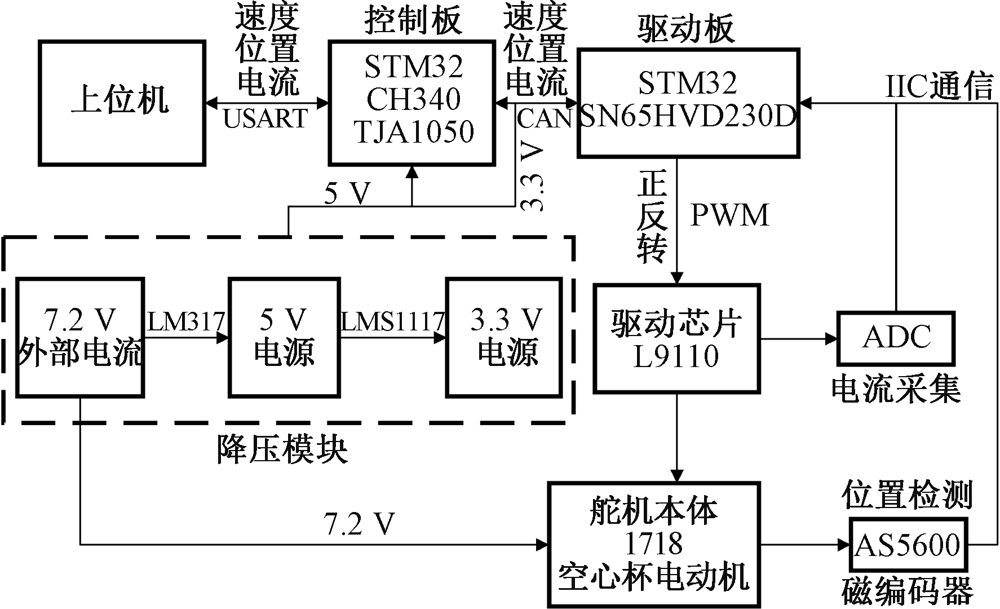
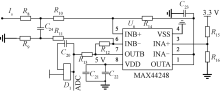
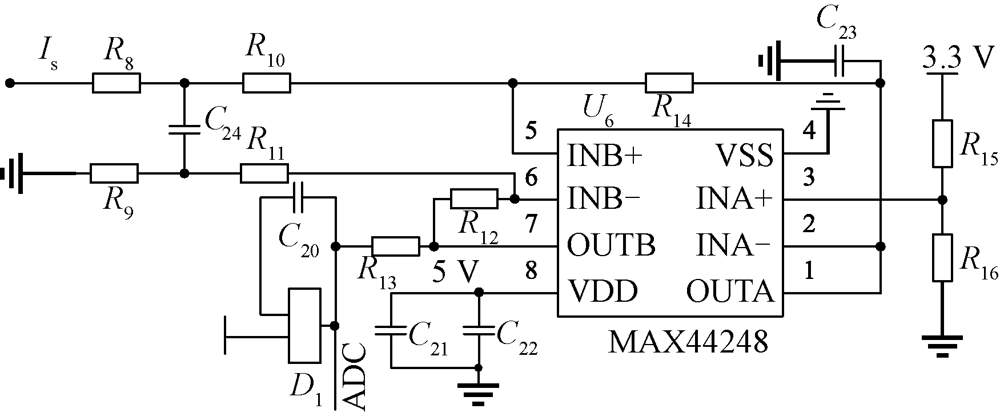
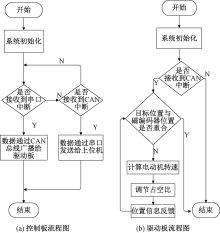
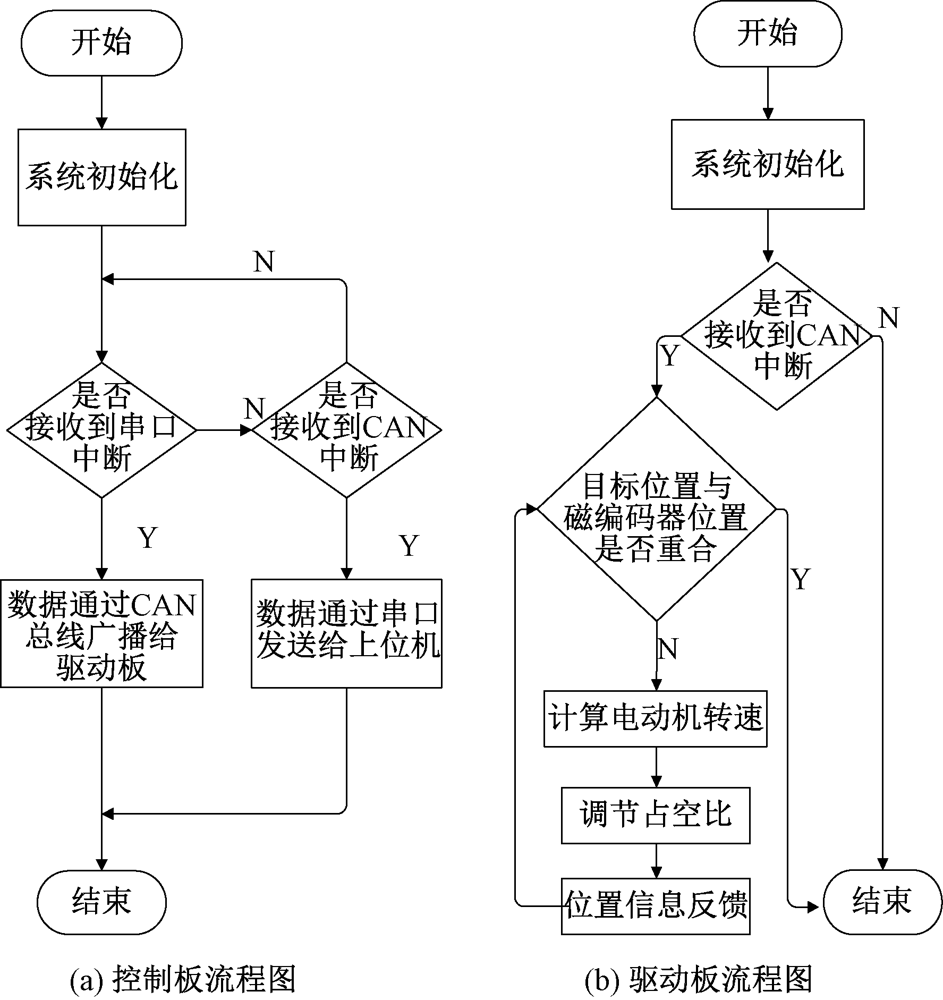
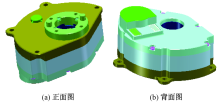
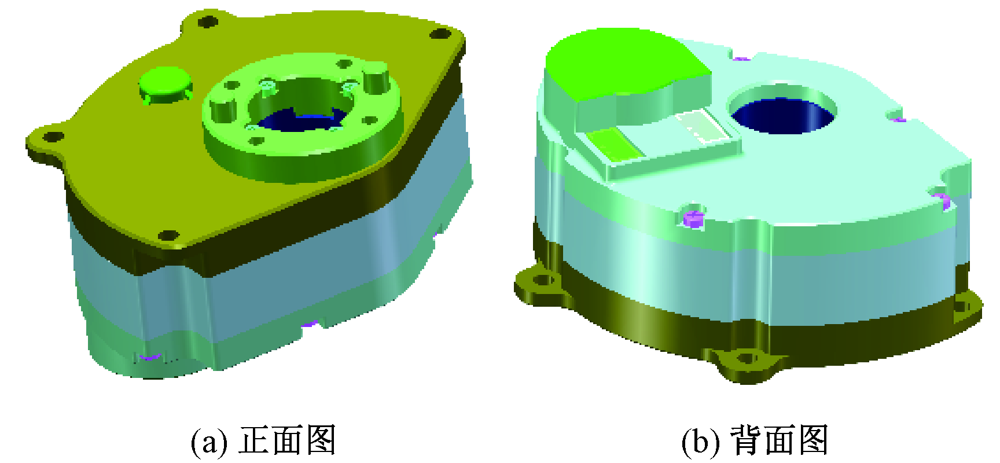
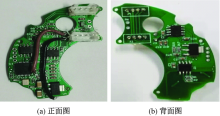
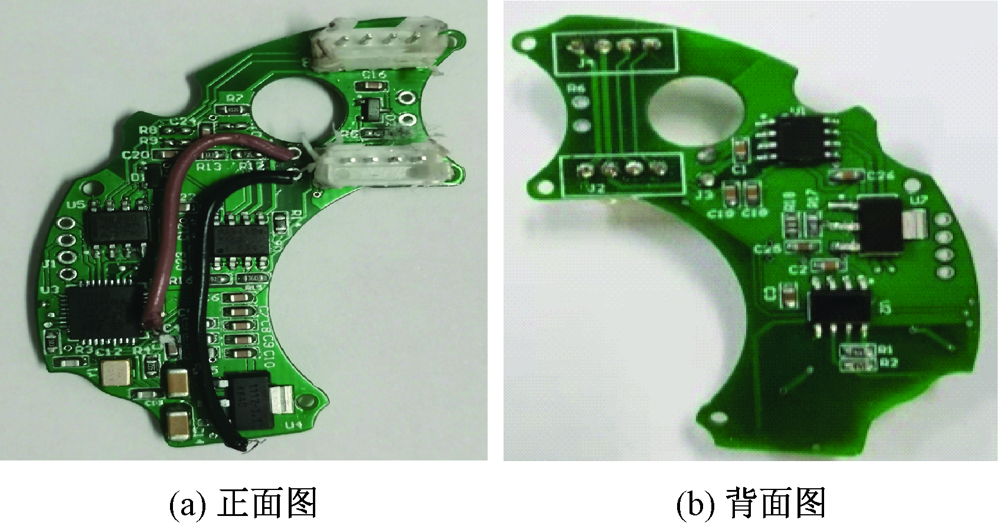
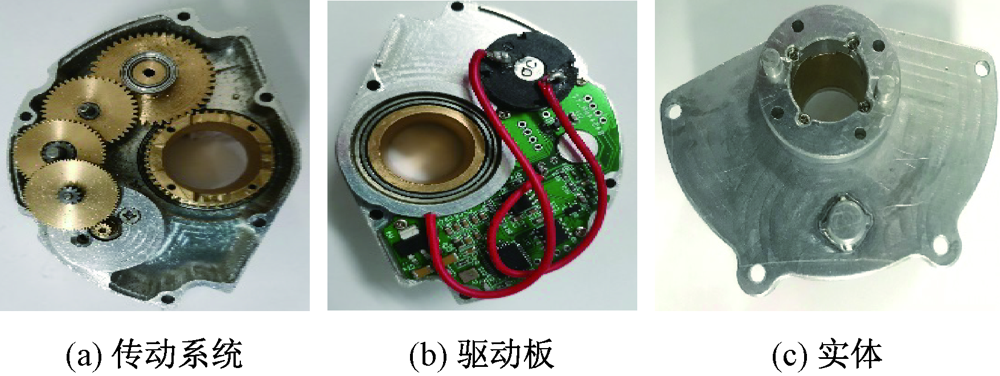
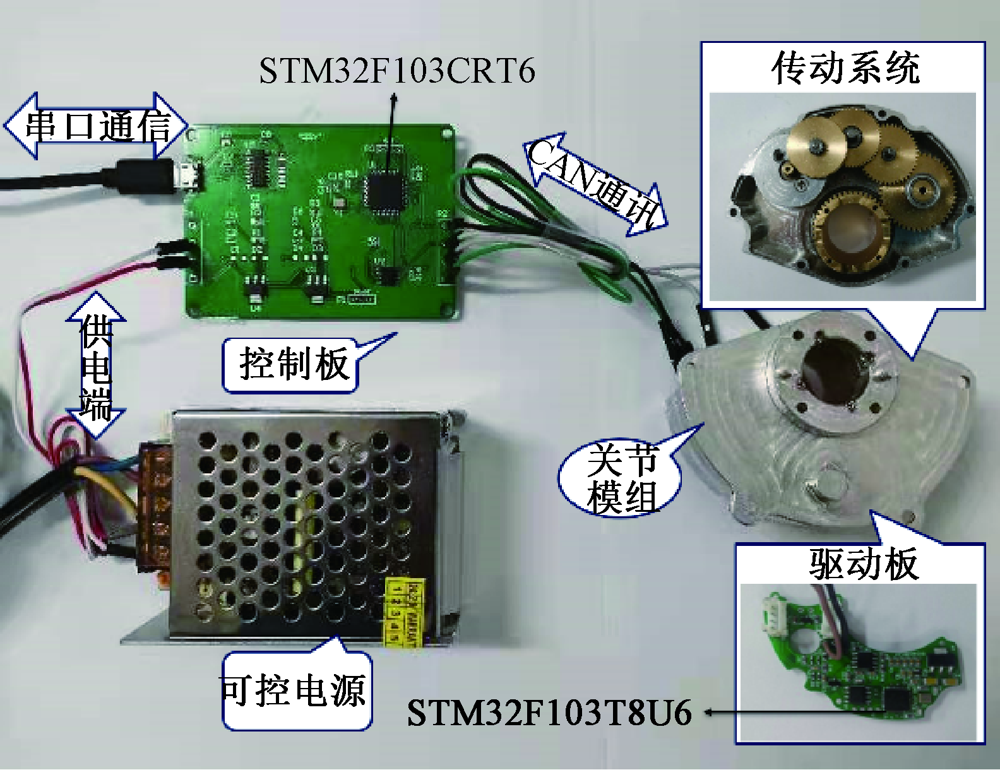
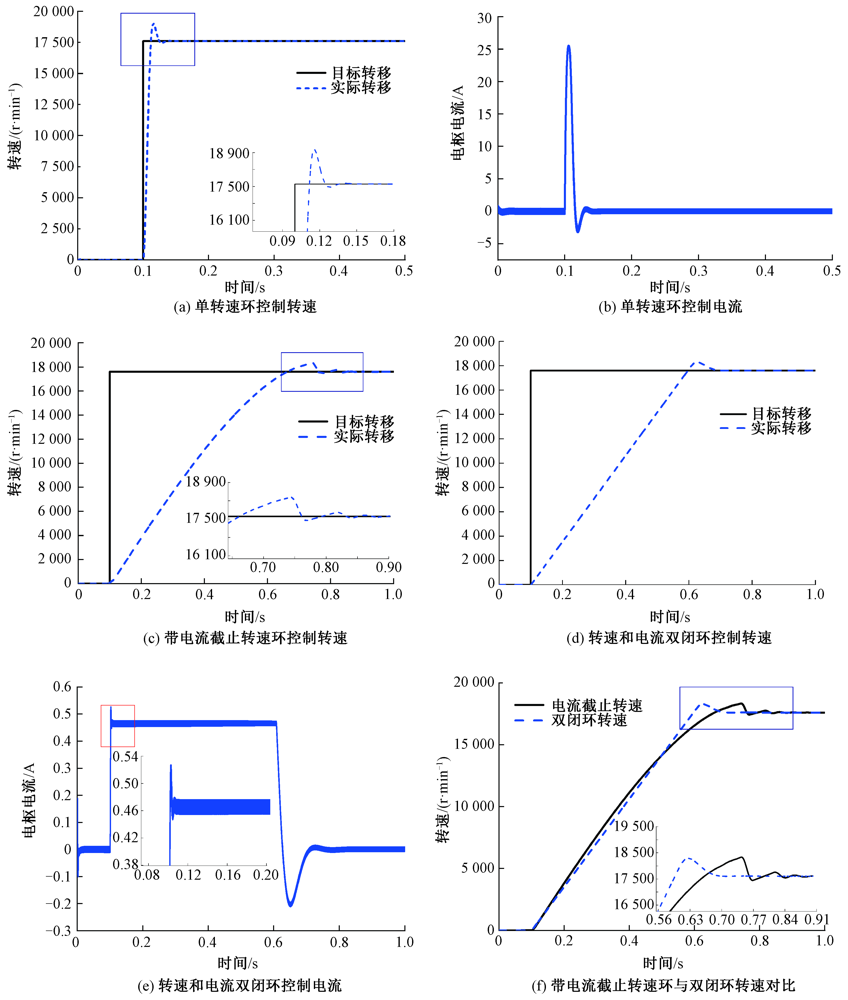
为减少纺织机器人所占空间并提高其控制性能,研制了一款用于落纱理管的新型纺织机器人腰部关节。采用有刷电动机为动力源,以STM32F103T8U6为主控芯片,以L9110S为驱动芯片,利用磁编码器AS5600与安装在输出轴末端的磁铁产生霍尔效应,实现腰部关节速度、位置的检测;通过对比单速度闭环控制和转速、电流双闭环系统,在控制算法上采用转速、电流双闭环比例积分(PI)控制系统进行调速;采用控制器局域网络(CAN)总线通信,以减少多关节布线的复杂程度。结果表明,所设计的机器人关节能有效减小体积,体现微型化设计,且使用范围更广泛,双闭环控制系统达到稳态的时间比单闭环控制缩短了30%。
中图分类号:
| [1] | 谭民, 王硕. 机器人技术研究进展[J]. 自动化学报, 2013,39(7):963-972. |
|
TAN Min, WANG Shuo. Research progress in robotics[J]. Acta Automatica Sinica, 2013,39(7):963-972.
doi: 10.3724/SP.J.1004.2013.00963 |
|
| [2] | 高峰, 郭为忠. 中国机器人的发展战略思考[J]. 机械工程学报, 2016,52(7):1-5. |
| GAO Feng, GUO Weizhong. Thinking of the development strategy of robots in china[J]. Journal of Mechanical Engineering, 2016,52(7):1-5. | |
| [3] |
OUYANG P R, ACOB J, PANO V. PD with sliding mode control for trajectory tracking of robotic system[J]. Robotics and Computer-Integrated Manufacturing, 2014,30(2):189-200.
doi: 10.1016/j.rcim.2013.09.009 |
| [4] | XIAO B, YIN S, KAYNAK O. Exponential tracking control of robotic manipulators with uncertain dynamics and kinematics[J]. IEEE Transactions on Industrial Informatics, 2016,63(10):6439-6449. |
| [5] |
GALICKI M. Finite-time trajectory tracking control in a task space of robotic manipulators[J]. Automatica, 2016,67:165-170.
doi: 10.1016/j.automatica.2016.01.025 |
| [6] | 杨思成, 张文增, 曹立国, 新型鼠笼式落纱机器人的研制[J]. 机械传动, 2017,41(12):138-145. |
| YANG Sicheng, ZHANG Wenzeng, CAO Liguo. Development of a novel squirrel-cage doffing robot[J]. Mechanical Drive, 2017,41(12):138-145. | |
| [7] | 顾万里, 胡云峰, 张森, 等. 有刷直流电动机自适应滑膜控制器设计与实验[J]. 西安交通大学学报, 2017,51(9):112-117. |
| GU Wanli, HU Yunfeng, ZHANG Sen, et al. Design and experiments on the adaptive sliding mode controller of brushed DC motor[J]. Journal of Xi'an Jiaotong University, 2017,51(9):112-117. | |
| [8] | 李宗俐, 许芳, 梁頔男, 等. 有刷直流电动机约束预测控制器设计及实现[J]. 吉林大学学报(信息科学版), 2017,35(4):363-369. |
| LI Zongli, XU Fang, LIANG Dinan, et al. Design and implementation of constraint predictive controller for brushed DC motor[J]. Journal of Jilin Univer-sity (Information Science), 2017,35(4):363-369. | |
| [9] |
CHEN Z Y, LIU Y, HE W, et al. Adaptive-neural-network-based trajectory tracking control for a nonholonomic wheeled mobile robot with velocity constraints[J]. IEEE Transactions on Industrial Electronics, 2021,68(6):5057-5067.
doi: 10.1109/TIE.41 |
| [10] |
ZHAO X W, TAO B, QIAN L, et al. Model-based actor-critic learning for optimal tracking control of robots with input saturation[J]. IEEE Transactions on Industrial Electronics, 2021,68(6):5046-5056.
doi: 10.1109/TIE.41 |
| [11] | ZHANG Lin, TIAN Wei, ZHENG Faying, et al. Accuracy compensation technology of closed-loop feedback of industrial robot joints[J]. Transactions of Nanjing University of Aeronautics and Astronautics, 2020,37(6):858-871. |
| [12] |
ZHOU J Y, HE R X, WANG Y, et al. Autonomous driving trajectory optimization with dual-loop iterative anchoring path smoothing and piecewise-jerk speed optimization[J]. IEEE Robotics and Automation Letters, 2021,6(2):439-446.
doi: 10.1109/LSP.2016. |
| [13] | 陈光荣, 郭盛, 侯博文, 等. 基于扩展雅可比矩阵的冗余液压驱动四足机器人运动控制[J]. 控制理论与应用, 2021,38(2):213-223. |
| CHEN Guangrong, GUO Sheng, HOU Bowen, et al. Motion control of a redundant hydraulically actuated quadruped robot based on extended Jacobian matrix[J]. Control Theory and Applications, 2021,38(2):213-223. | |
| [14] | 吴柳波, 李欣荣, 杜金丽. 基于轮廓提取的缝纫机器人运动轨迹规划研究进展[J]. 纺织学报, 2021,42(4):191-200. |
| WU Liubo, LI Xinrong, DU Jinli. Research progress of motion trajectory planning of sewing robot based on contour extraction[J]. Journal of Textile Research, 2021,42(4):191-200. | |
| [15] | 周虎, 刘涛, 高金杰, 等. 手工地毯植绒机轨迹规划及其速度控制优化[J]. 纺织学报, 2019,40(10):177-182. |
| ZHOU Hu, LIU Tao, GAO Jinjie, et al. Planning of trajectory and optimization of speed control of hand-made tufting machine[J]. Journal of Textile Research, 2019,40(10):177-182. | |
| [16] | 孟瑶, 李晓娟, 关永, 等. 机器人关节通信总线系统的建模与验证[J]. 软件学报, 2018,29(6):1699-1715. |
| MENG Yao, LI Xiaojuan, GUAN Yong, et al. Modeling and verification for robot joint bus communication system[J]. Journal of Software, 2018,29(6):1699-1715. | |
| [17] | SOUNDIRARRAJAN N, SRINIVASAN K. Performance evaluation of ant lion optimizer-based PID controller for speed control of PMSM[J]. Journal of Testing and Evaluation, 2021,49(2):1104-1118. |
| [18] |
YEAM T, LEE D C. Design of sliding-mode speed controller with active damping control for single-inverter dual-pmsm drive systems[J]. IEEE Transactions on Power Electronics, 2021,36(5):5794-5801.
doi: 10.1109/TPEL.63 |
| [19] |
PETRIC I Z, VUKOSAVIC S N, DEGANO M, et al. A digital internal model current controller for salient machines[J]. IEEE Transactions on Industrial Electronics, 2021,68(6):4703-4717.
doi: 10.1109/TIE.41 |
| [20] |
MO Shuai, LI Xu, YANG Zhenning, et al. Integrated design of brushless motor drive and control system for robot joints[J]. Journal of Central South University, 2021,28(12):1-11.
doi: 10.1007/s11771-020-4504-x |
| [1] | 戴宁, 胡旭东, 彭来湖, 钟垚森. 无缝内衣机密度电动机的控制技术[J]. 纺织学报, 2020, 41(06): 161-167. |
| [2] | 张成俊 左小艳 张弛 吴晓光. 采用网络控制的电脑横机CAN总线调度仿真[J]. 纺织学报, 2016, 37(08): 154-159. |
| [3] | 胡旭东 黄肖华 彭来湖. 内嵌驱动针织机械密度调节装置的研制[J]. 纺织学报, 2015, 36(07): 131-135. |
| [4] | 胡旭东 黄栋明 彭来湖. 超多机头绣花机自动换底线系统设计[J]. 纺织学报, 2015, 36(04): 134-139. |
| [5] | 吴朝阳;苏俊;陈淑侠;芮延年. HR-I电子提花机控制器的设计[J]. 纺织学报, 2010, 31(3): 115-118. |
| [6] | 金玉珍;吴震宇;武传宇;韩涛;胡旭东;朱祖超. 基于CAN总线喷气织机控制系统的研制[J]. 纺织学报, 2009, 30(02): 117-120. |
| [7] | 刘桂英;周琴;欧阳三泰. 针织热定形机变频调速同步控制的设计[J]. 纺织学报, 2008, 29(3): 118-121. |
| [8] | 赵斌. 基于CAN总线的粗纱机控制系统[J]. 纺织学报, 2006, 27(5): 84-86. |
|
||
 京公网安备11010502044800号
京公网安备11010502044800号