纺织学报 ›› 2023, Vol. 44 ›› Issue (08): 197-204.doi: 10.13475/j.fzxb.20220200701
陈罡1( ), 金贵阳2, 吴菁1, 罗千3
), 金贵阳2, 吴菁1, 罗千3
CHEN Gang1(), JIN Guiyang2, WU Jing1, LUO Qian3
摘要:
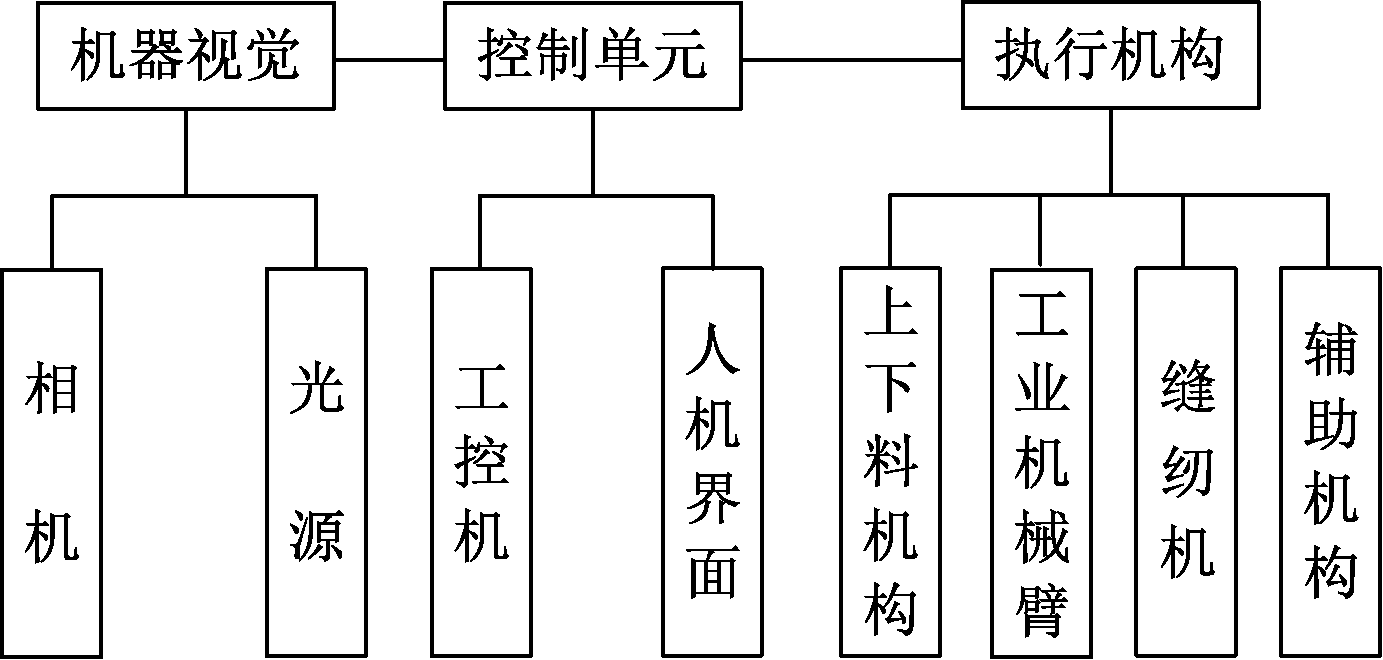
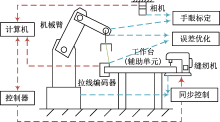
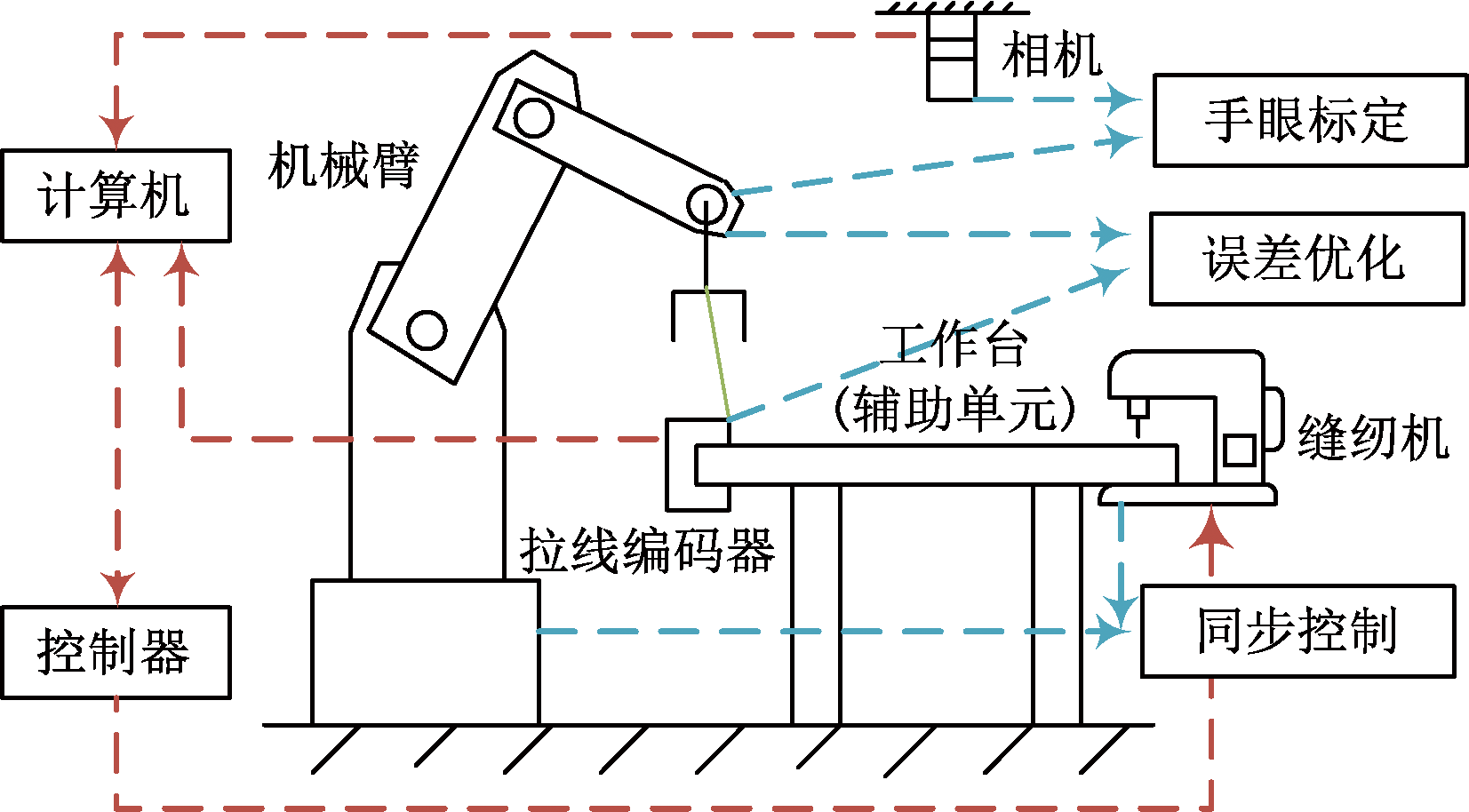
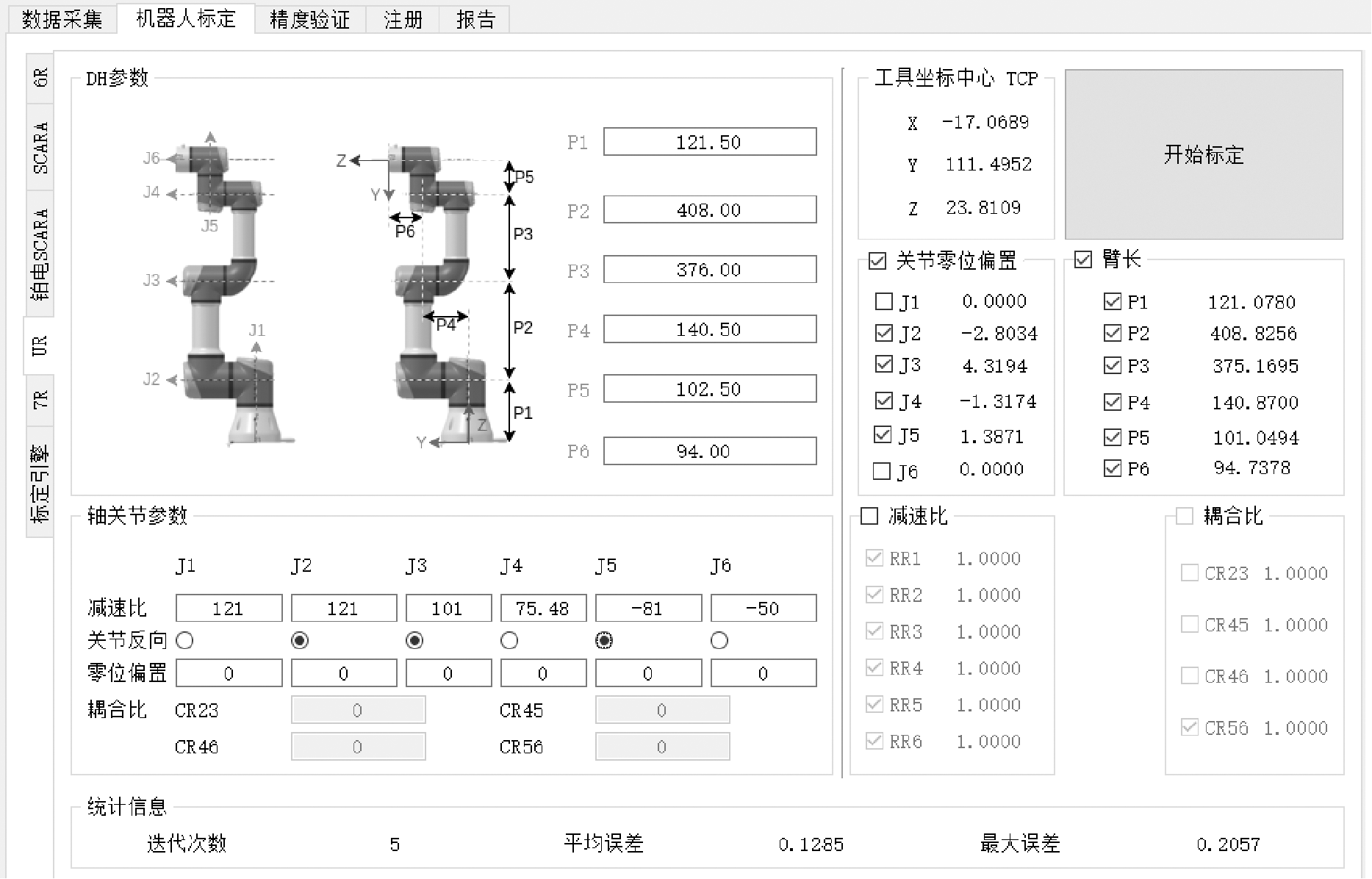
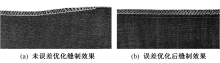
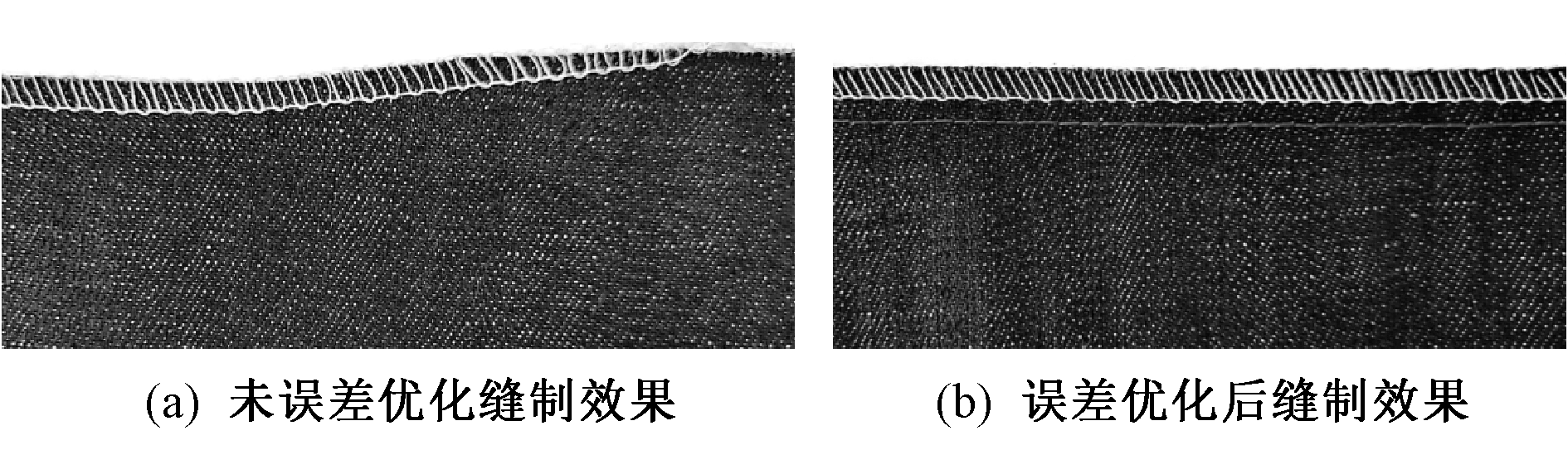
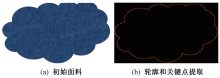
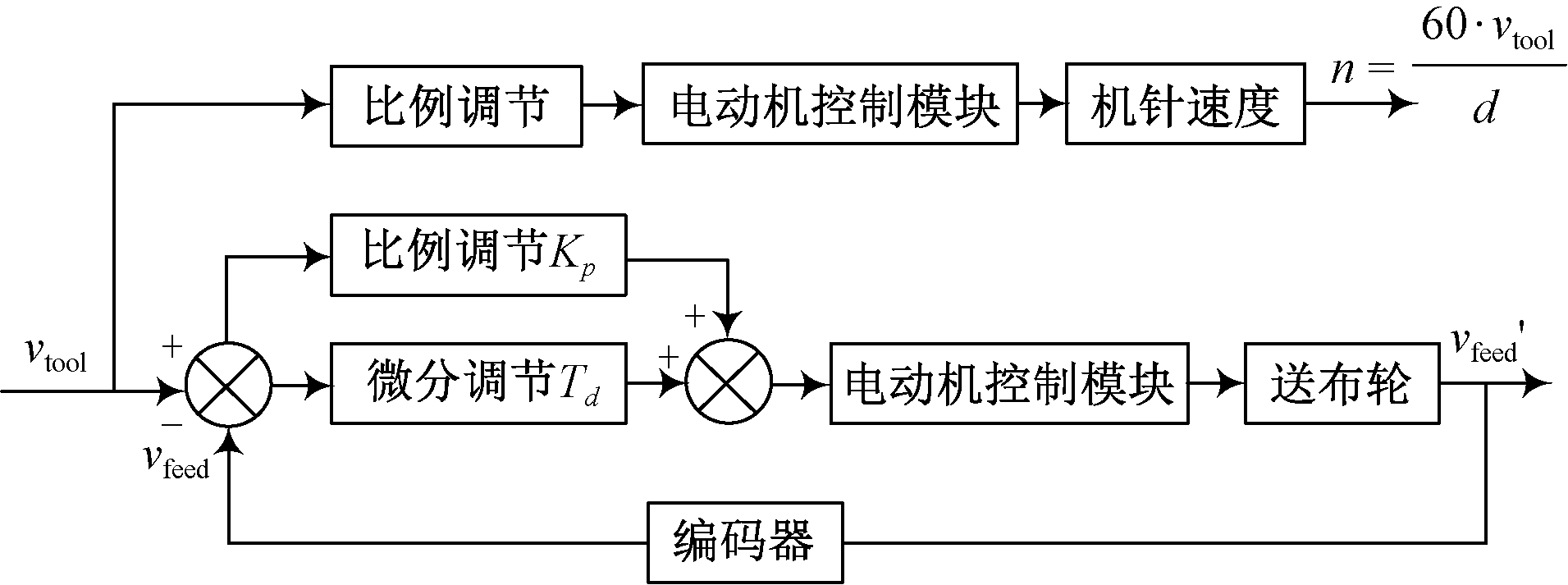
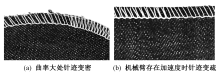
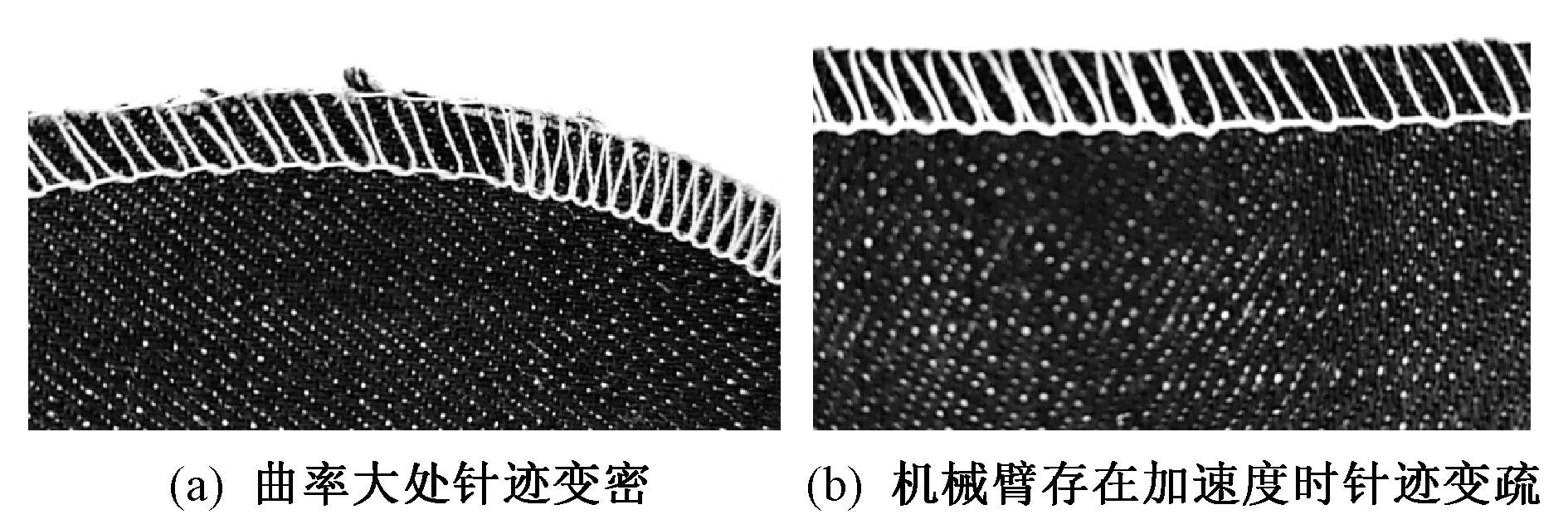
针对面料缝合过程中人力需求高、自动化程度低、效率低等问题,结合机器视觉、工业机械臂和缝机等,设计并研发了从上料到缝合到下料的智能缝制成套装备。首先,对基于拉线编码器的机械臂绝对定位误差优化补偿技术、基于Canny算子的面料轮廓识别与关键点提取技术、基于比例积分微分(PID)闭环控制算法的机械臂与缝纫机速度的同步控制技术进行了研究。然后,针对具体的应用需求研发了双层面料智能缝制设备,并对其进行了简单介绍。案例分析结果表明,通过几种技术的结合,提高了缝制成套装备机械臂的绝对定位精度、面料轮廓识别提取能力、缝制质量的一致性,减少了人工需求,助力服装缝制行业的转型升级。
中图分类号:
| [1] | 吴柳波, 李新荣, 杜金丽. 基于轮廓提取的缝纫机器人运动轨迹规划研究进展[J]. 纺织学报, 2021, 42(4): 10-19. |
|
WU Liubo, LI Xinrong, DU Jinli. Research progress of motion trajectory planning of sewing robot based on contour extraction[J]. Journal of Textile Research, 2021, 42(4):10-19.
doi: 10.1177/004051757204200103 |
|
| [2] | 吴锦辉, 陶友瑞. 工业机器人定位精度可靠性研究现状综述[J]. 中国机械工程, 2020, 31(18):9-17. |
| WU Jinhui, TAO Yourui. Review on research status of positioning accuracy reliability of industrial robots[J]. China Mechanical Engineering, 2020, 31(18):9-17. | |
| [3] | 宫思远, 赵子越, 刘倩頔. 工业机器人校准技术与补偿方法发展现状及趋势[J]. 计测技术, 2021, 41(3):1-8. |
| GONG Siyuan, ZHAO Ziyue, LIU Qiandi. Development status and trend of industrial robot calibration technology and compensation method[J]. Metrology & Measurement Technology, 2021, 41(3):1-8. | |
| [4] | 乔贵方, 吕仲艳, 张颖, 等. 基于BAS-PSO算法的机器人定位精度提升[J]. 光学精密工程, 2021, 29(4):763-771. |
|
QIAO Guifang, LÜ Zhongyan, ZHANG Ying, et al. Improvement of robot kinematic accuracy based on BAS-PSO algorithm[J]. Optics and Precision Engineering, 2021, 29(4):763-771.
doi: 10.37188/OPE.20212904.0763 |
|
| [5] |
周星, 黄石峰, 朱志红. 六关节工业机器人TCP标定模型研究与算法改进[J]. 机械工程学报, 2019, 55(11): 186-196.
doi: 10.3901/JME.2019.11.186 |
|
ZHOU Xing, HUANG Shifeng, ZHU Zhihong. TCP calibration model research and algorithm improvement of six joint industrial robot[J]. Journal of Mechanical Engineering, 2019, 55(11):186-196.
doi: 10.3901/JME.2019.11.186 |
|
| [6] | 刘汉邦, 李新荣, 刘立东. 服装面料自动抓取转移方法的研究进展[J]. 纺织学报, 2021, 42(1):7-13. |
|
LIU Hanbang, LI Xinrong, LIU Lidong. Research progress of automatic grabbing and transfer methods for garment fabrics[J]. Journal of Textile Research, 2021, 42(1):7-13.
doi: 10.1177/004051757204200102 |
|
| [7] | 田鹏飞, 杨树明, 吴孜越, 等. 结合精度补偿的机器人优化手眼标定方法[J]. 西安交通大学学报, 2020, 54(8): 99-106. |
| TIAN Pengfei, YANG Shuming, WU Ziyue, et al. An optimal hand-eye calibration method for robots based on precision compensation[J]. Journal of Xi'an Jiaotong University, 2020, 54(8):99-106. | |
| [8] | 倪华康, 杨泽源, 杨一帆, 等. 考虑基坐标系误差的机器人运动学标定方法[J]. 中国机械工程, 2022, 33(6): 647-655. |
| NI Huakang, YANG Zeyuan, YANG Yifan, et al. Robot kinematics calibration method considering base frame error[J]. China Mechanical Engineering, 2022, 33(6): 647-655. | |
| [9] | 梅江平, 孙思嘉, 罗振军, 等. 基于单维拉线测量系统的码垛机器人定位误差分析及运动学标定[J]. 天津大学学报, 2018, 51(7):748-754. |
| MEI Jiangping, SUN Sijia, LUO Zhenjun, et al. Positioning error analysis and kinematic calibration of robot palletizer based on one-dimensional cable measurement system[J]. Journal of Tianjin University, 2018, 51(7):748-754. | |
| [10] | 谢习华, 李智勇, 周烜亦, 等. 机械臂运动学标定技术发展概况[J]. 宇航计测技术, 2018, 38(6):25-32. |
| XIE Xihua, LI Zhiyong, ZHOU Xuanyi, et al. Review on kinematics calibration technology of manipulator[J]. Journal of Astronautic Metrology and Measurement, 2018, 38(6):25-32. | |
| [11] | 杜泽峰, 王晗, 刘湛基, 等. 基于粒子群算法的拉线位移传感器三维坐标测量[J]. 组合机床与自动化加工技术, 2017(11):84-87. |
| DU Zefeng, WANG Han, LIU Zhanji, et al. Three-dimensional coordinate measurement of cable displacement sensor based on particle swarm optimization[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2017(11):84-87. | |
| [12] | 陈宵燕, 张秋菊, 孙沂琳. 串联机器人多模式标定与刚柔耦合误差补偿方法研究[J]. 农业机械学报, 2019, 50(3): 396-403. |
| CHEN Xiaoyan, ZHANG Qiuju, SUN Yilin. Multi-mode calibration and rigid-flexible coupling error compensation method of serial Robot[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(3):396-403. |
| [1] | 吴冬雪, 刘让同, 于媛媛, 李淑静, 韩赟. 下肢运动状态特征对裤装臀围的影响分析[J]. 纺织学报, 2024, 45(01): 168-175. |
| [2] | 韩燕娜, 江翼成, 郑霞, 杨子田. 情绪在小生褶子设计要素和语义评价间的中介作用[J]. 纺织学报, 2024, 45(01): 185-193. |
| [3] | 周莉, 樊培宏, 金玉婷, 张龙琳, 李新荣. 服装逆向造型的数字化设计方法[J]. 纺织学报, 2023, 44(12): 138-144. |
| [4] | 刘雨婷, 宋泽涛, 赵胜男, 王星岚, 常素芹. 个体冷却服的研究现状与发展趋势[J]. 纺织学报, 2023, 44(12): 233-241. |
| [5] | 史伟民, 韩思捷, 屠佳佳, 陆伟健, 段玉堂. 基于机器视觉的空纱筒口定位方法[J]. 纺织学报, 2023, 44(11): 105-112. |
| [6] | 苗雪, 王永进, 王方明. 充气保暖复合面料厚度与热阻的相关性分析[J]. 纺织学报, 2023, 44(11): 176-182. |
| [7] | 杨钰蝶, 李承璋, 金剑, 郑晶晶. 基于上肢活动性的灭火防护服背带的设计与评价[J]. 纺织学报, 2023, 44(11): 183-189. |
| [8] | 张俊, 胡嵩, 童梦霞, 肖文陵. 感性工学在纺织服装领域的研究进展[J]. 纺织学报, 2023, 44(11): 240-249. |
| [9] | 刘蓉, 谢红. 基于服装结构特征识别的相似样板匹配技术[J]. 纺织学报, 2023, 44(10): 134-142. |
| [10] | 张建磊, 申攀登, 何琳, 程隆棣. 异质性环境规制对中国纺织服装业碳排放的影响[J]. 纺织学报, 2023, 44(10): 149-156. |
| [11] | 宋慧慧, 卢业虎. 基于技术接受度模型的模块化服装使用意愿分析[J]. 纺织学报, 2023, 44(10): 157-163. |
| [12] | 赵辰, 王敏, 李俊. 个体降温服优化设计对其降温效果影响的研究进展[J]. 纺织学报, 2023, 44(09): 243-250. |
| [13] | 任泽, 钟安华. 基于男性腰臀裆部NURBS曲面模型的内裤数字化制版[J]. 纺织学报, 2023, 44(08): 167-173. |
| [14] | 马创佳, 齐立哲, 高晓飞, 王子恒, 孙云权. 基于改进YOLOv4-Tiny的缝纫线迹质量检测方法[J]. 纺织学报, 2023, 44(08): 181-188. |
| [15] | 陈泰芳, 周亚勤, 汪俊亮, 徐楚桥, 李冬武. 基于视觉特征强化的环锭纺细纱断头在线检测方法[J]. 纺织学报, 2023, 44(08): 63-72. |
|
||
 京公网安备11010502044800号
京公网安备11010502044800号