纺织学报 ›› 2023, Vol. 44 ›› Issue (11): 199-207.doi: 10.13475/j.fzxb.20220506701
戴宁1,2( ), 梁汇江3, 胡旭东1, 戚栋明2,4, 徐郁山3, 屠佳佳1, 史伟民1
), 梁汇江3, 胡旭东1, 戚栋明2,4, 徐郁山3, 屠佳佳1, 史伟民1
DAI Ning1,2(), LIANG Huijiang3, HU Xudong1, QI Dongming2,4, XU Yushan3, TU Jiajia1, SHI Weimin1
摘要:
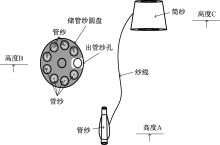
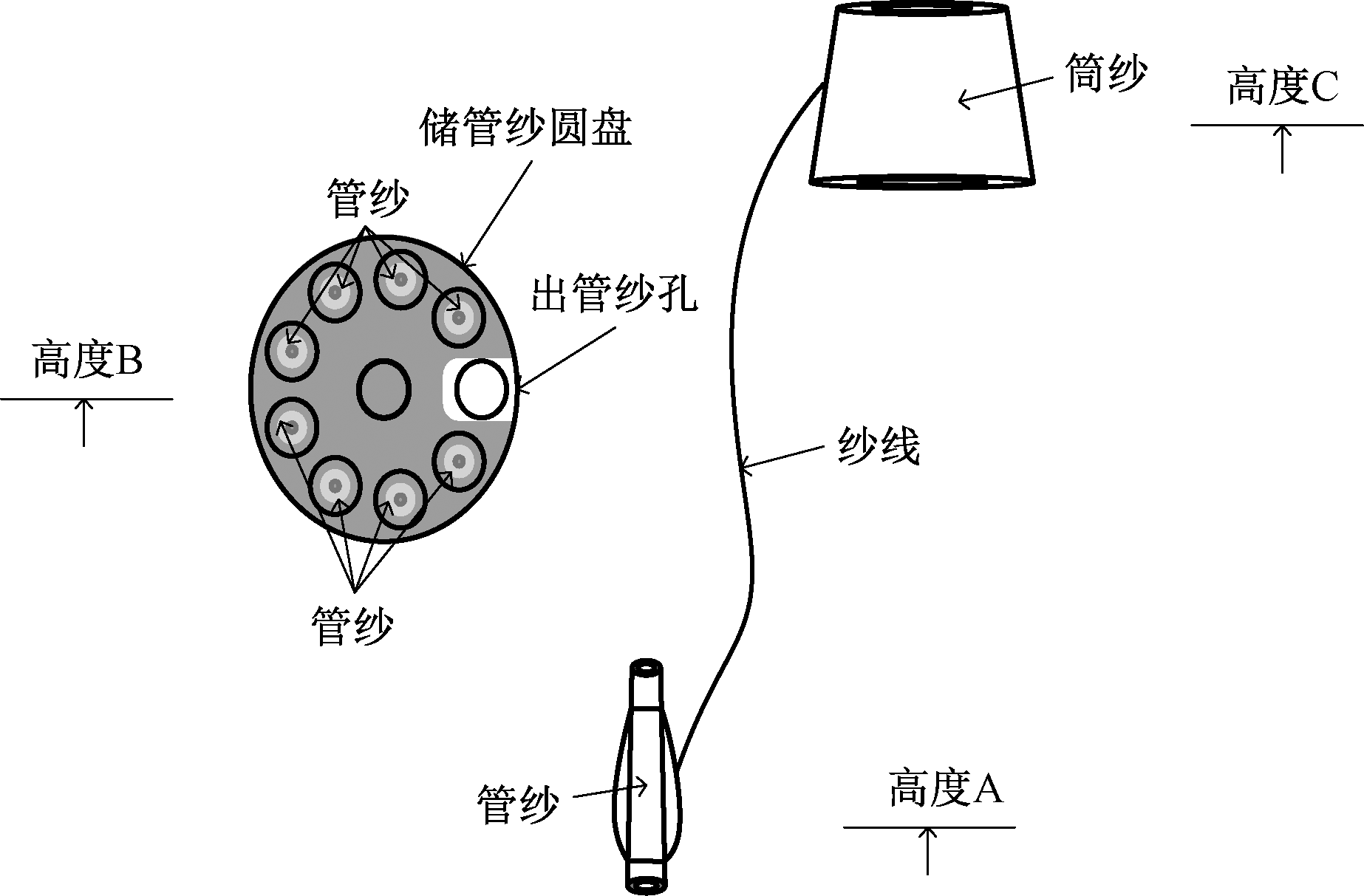
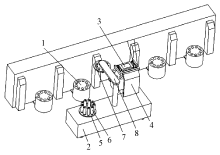
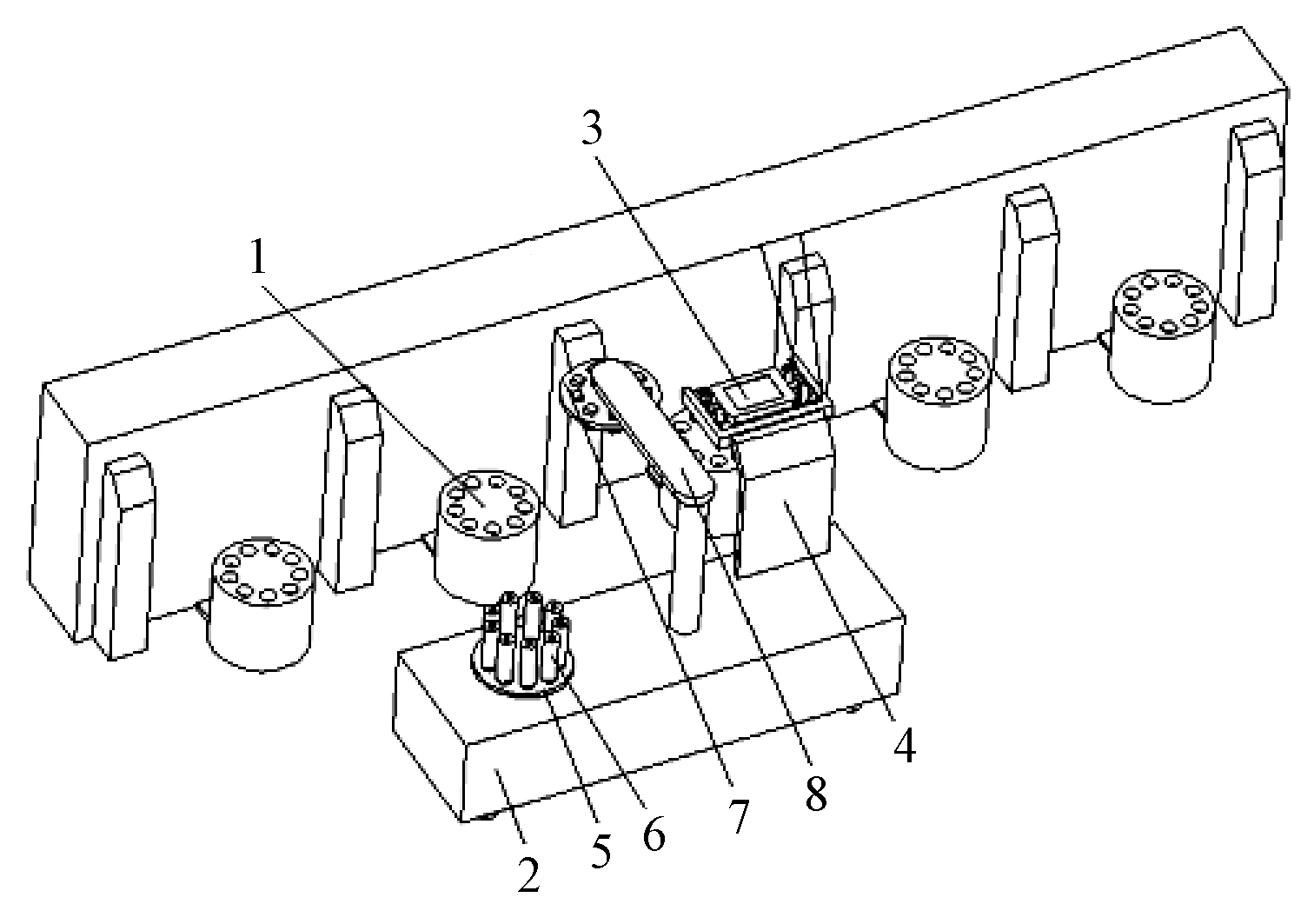
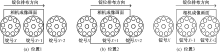
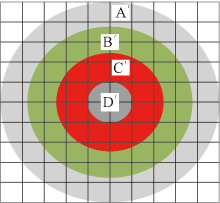
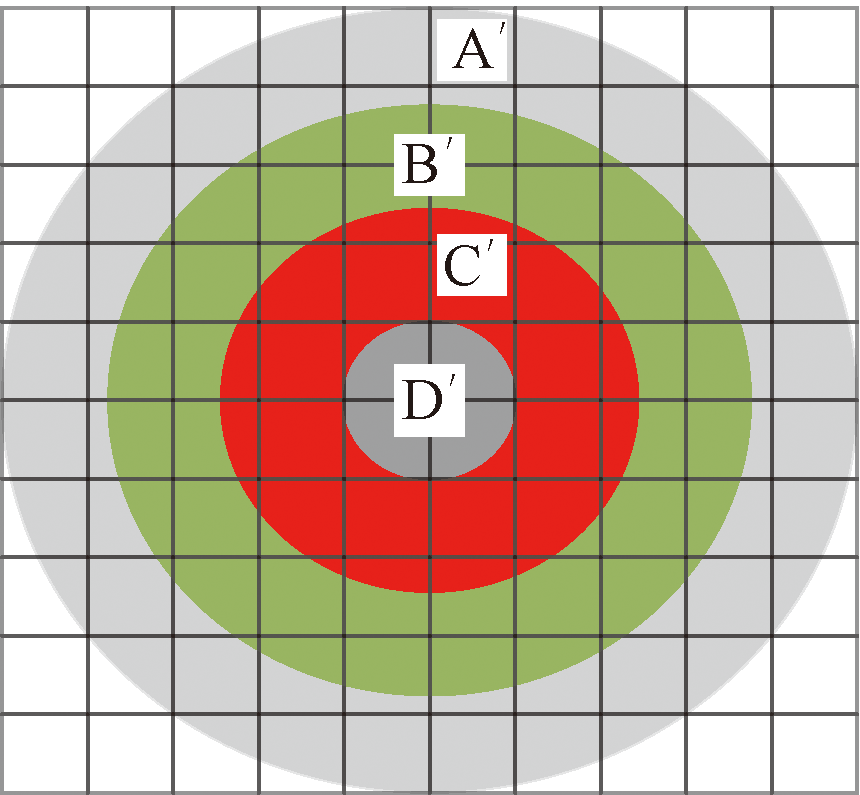
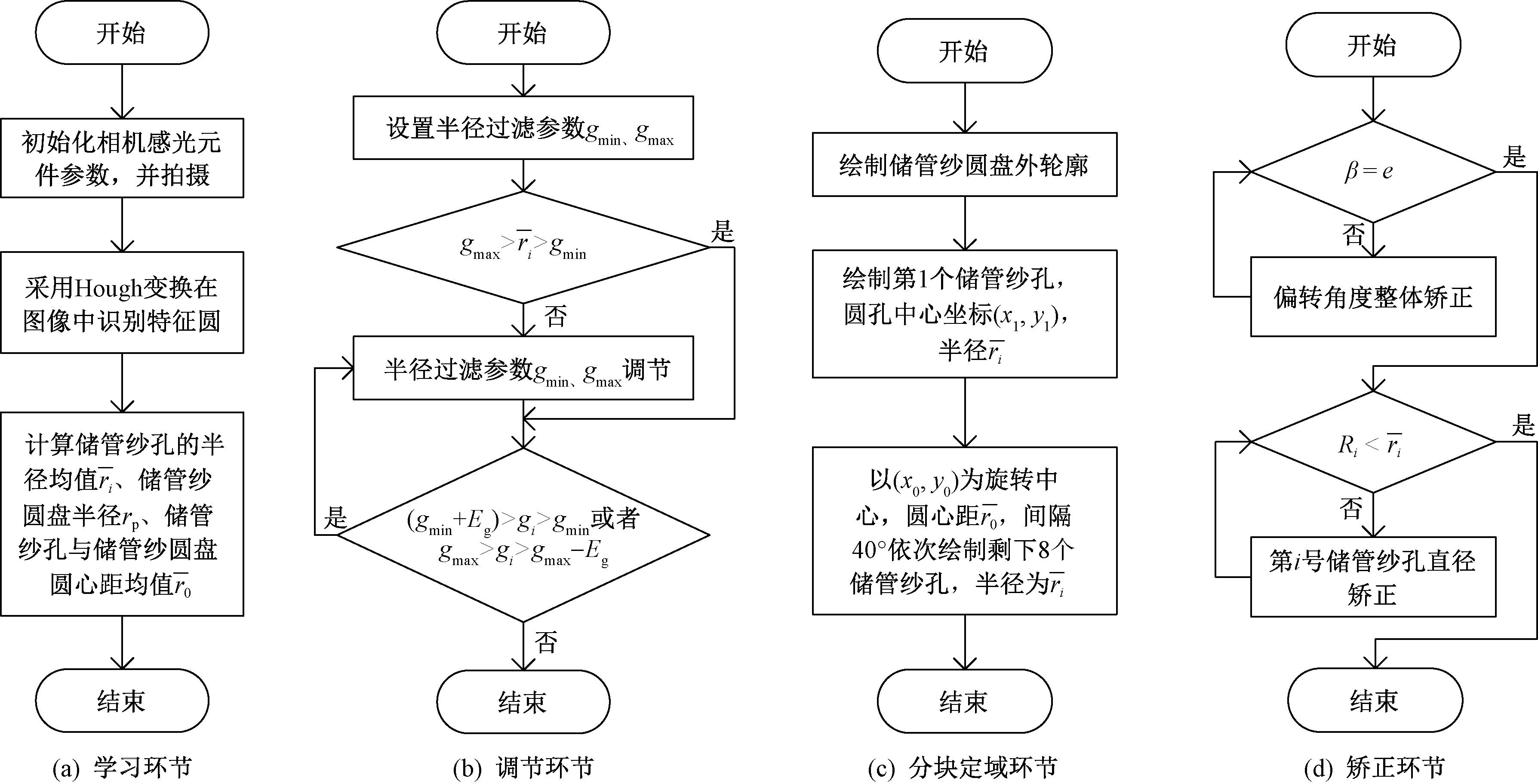
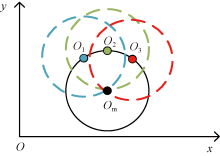
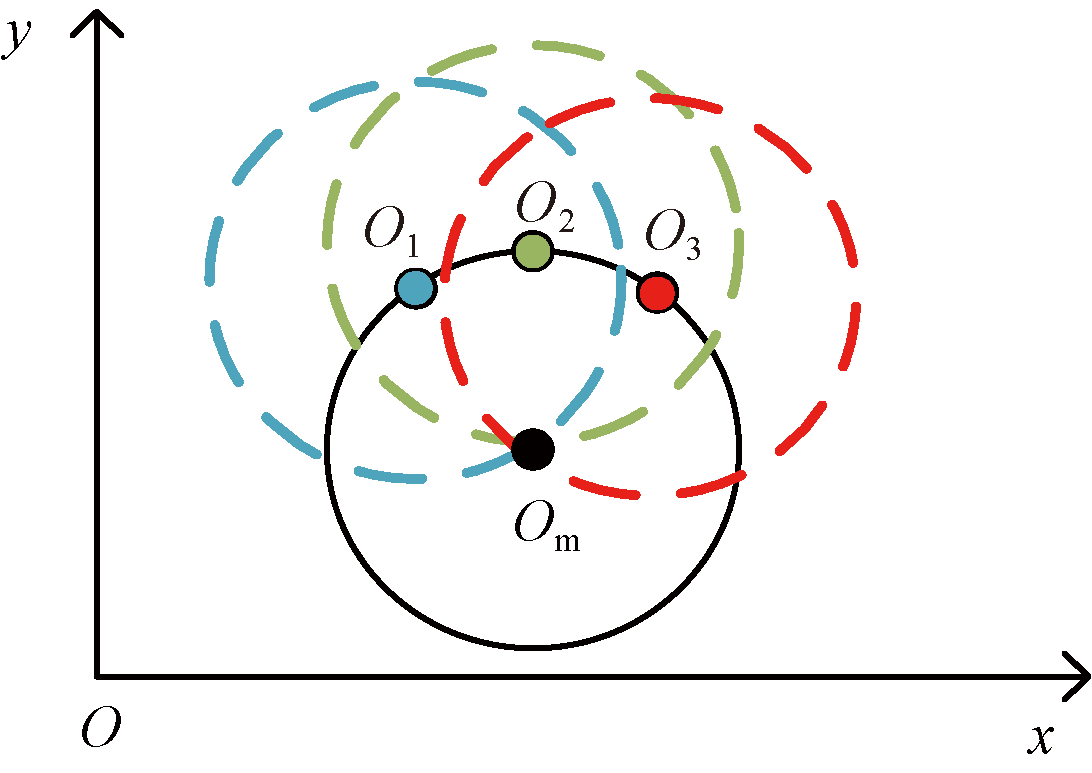
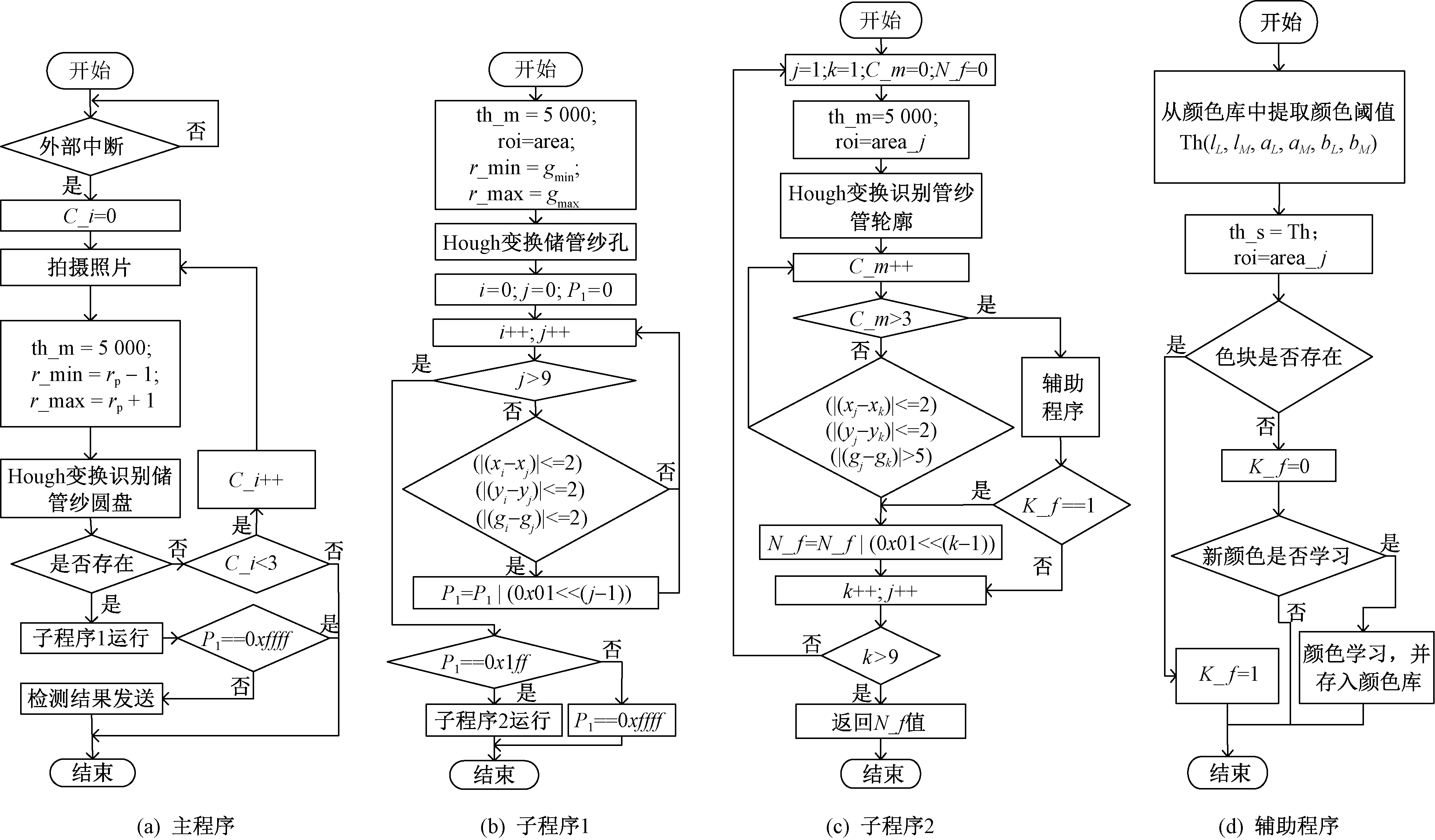
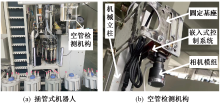
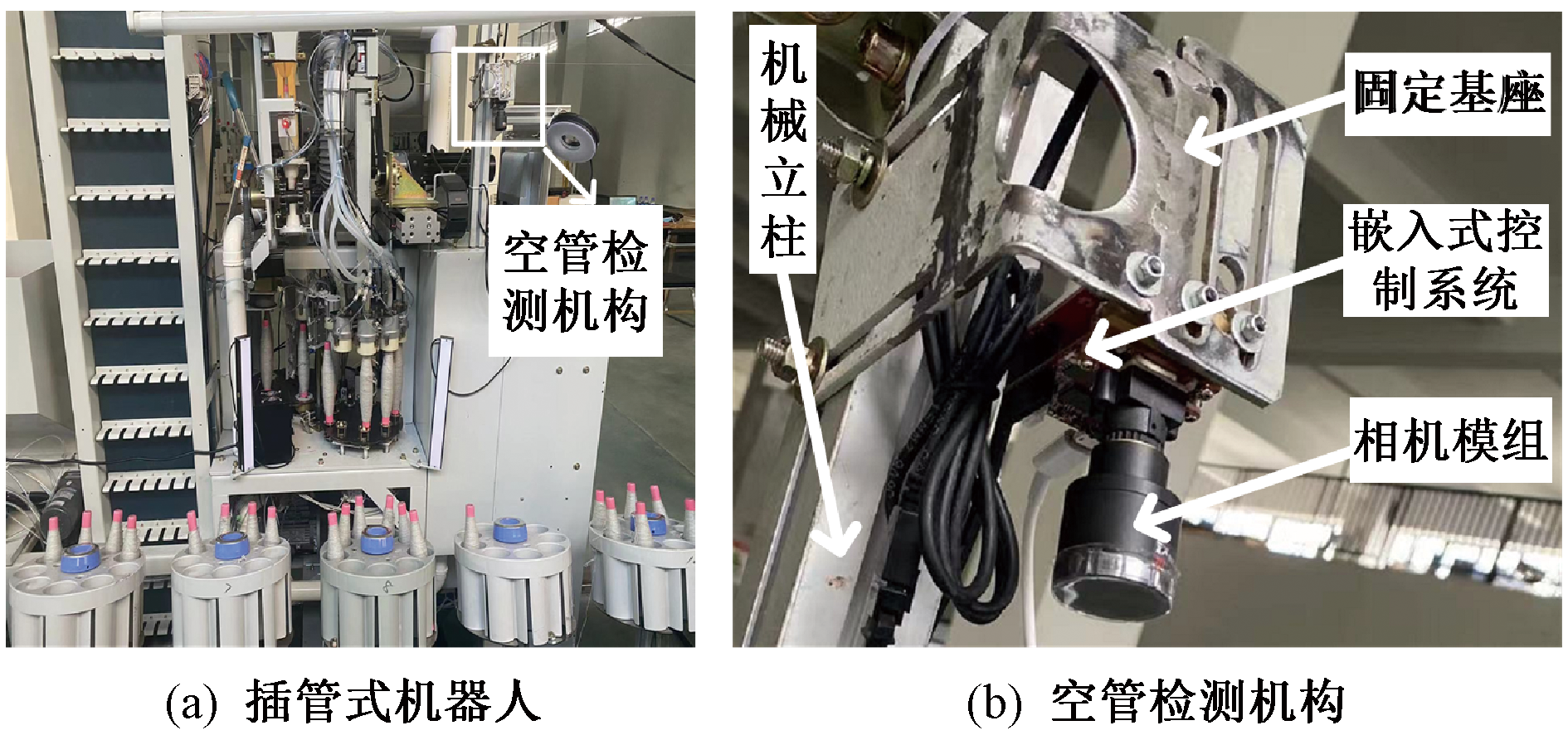
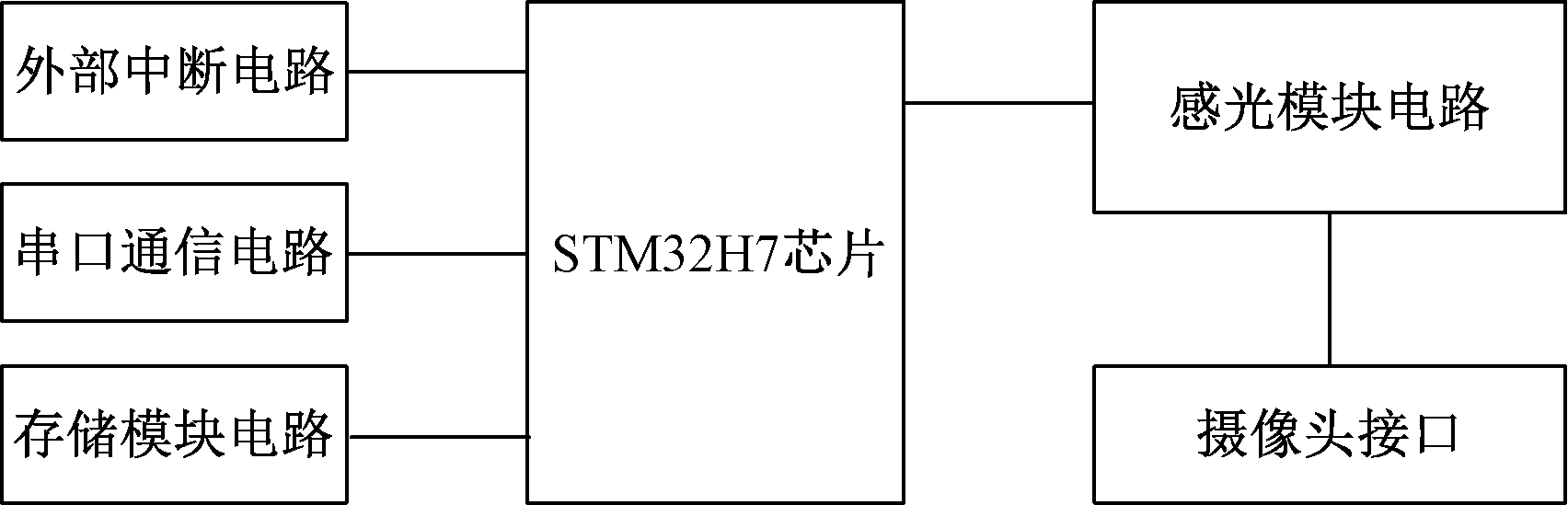
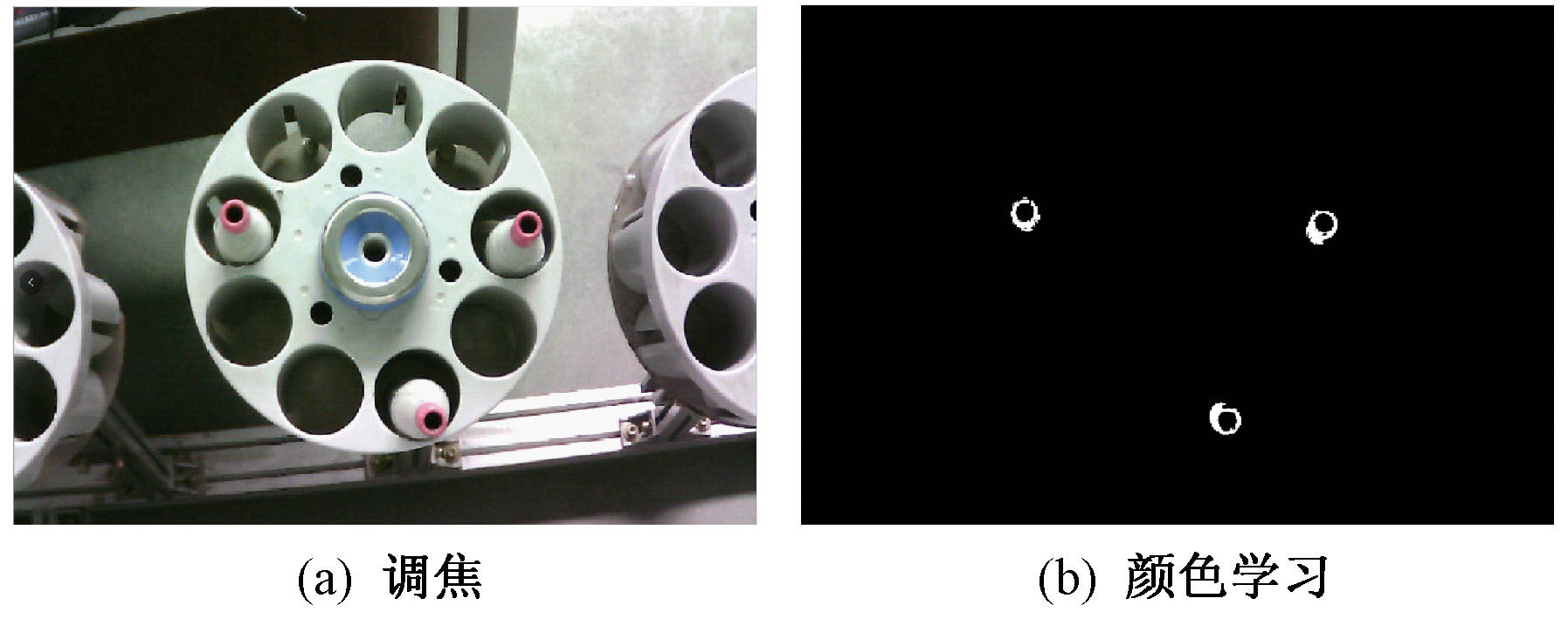
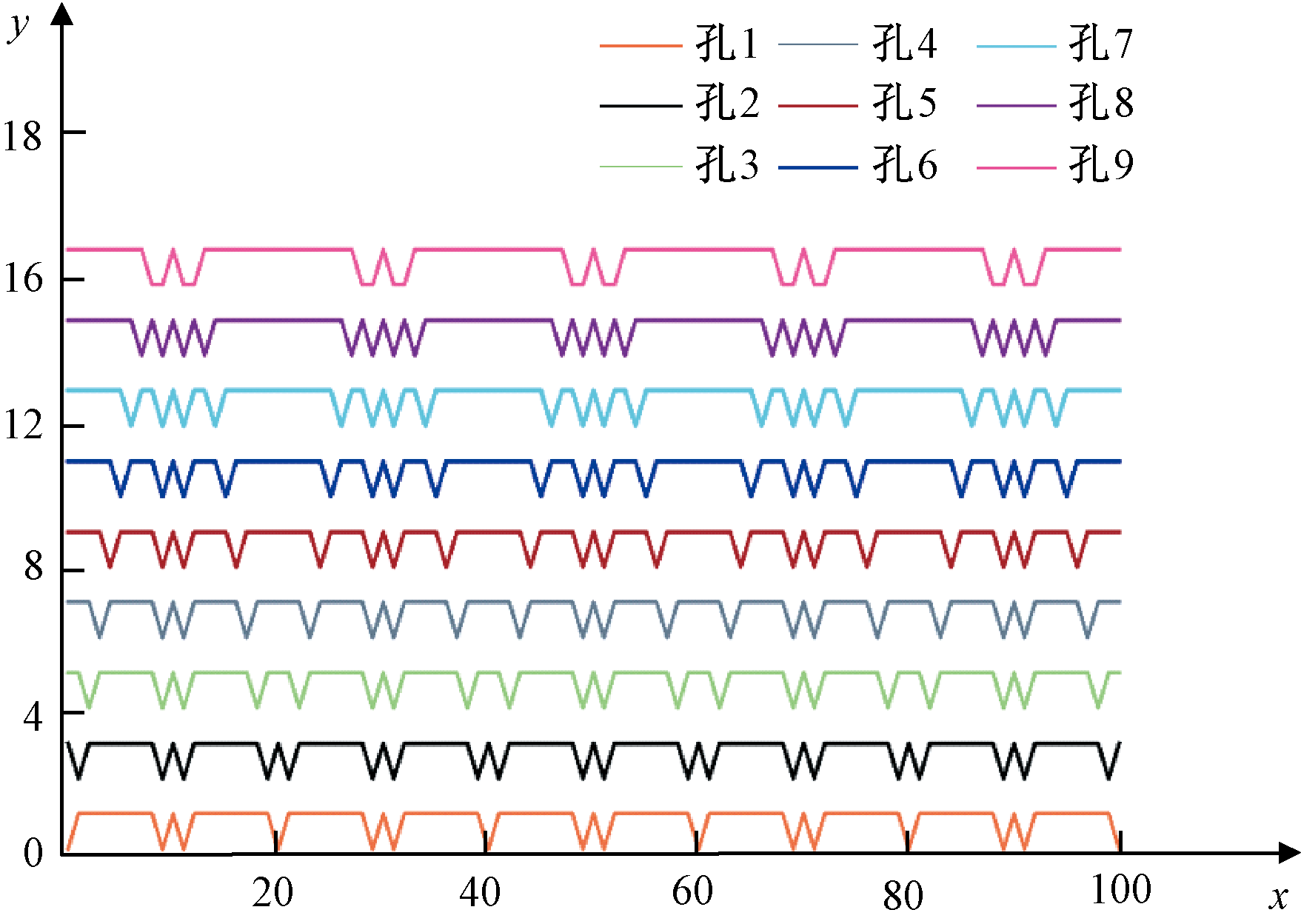
针对利用插管式机器人在巡视络筒机设备时,存在无法检测储管纱圆盘均匀排布孔内是否存在管纱的问题,提出了一种基于图像识别的空管状态检测方法。结合络筒机及插管式机器人工作机制,将集嵌入式控制系统、相机模组于一体的空管检测机构固定在竖直机械立柱上,并随插管式机器人做水平往复直线运动。嵌入式控制系统通过捕获插管式机器人发送的锭位信号,实现该锭位储管纱圆盘图像采集,通过学习、调节、分块定域、矫正等准备环节及分级处理环节进行图像处理,并将处理后各均匀排布孔内管纱的实时情况经由通信接口传输至插管式机器人。最后搭建实验平台,进行空管状态检测稳定性测试。结果表明,本文方法检测效果稳定、准确度高,且成本低、安装简单,便于实际工程应用。
中图分类号:
| [1] | 李衍田. 纱库式自动络筒机智能投纱系统的改造实践[J]. 纺织器材, 2019, 46(5):54-55. |
| LI Yantian. Reform practice of the intelligent yarn feeding system of auto-coner with yarn bank[J]. Textile Accessories, 2019, 46(5):54-55. | |
| [2] | 倪远. 纱库式自动络筒机管纱自动上纱技术改造项目现状与市场分析[J]. 纺织器材, 2019, 46(1):9-12. |
| NI Yuan. Current situation and market analysis of the technical reform project of auto-feeding technology of bobbin yarn for the auto-coner with yarn bank[J]. Textile Accessories, 2019, 46(1):9-12. | |
| [3] | 夏治刚, 徐傲, 万由顺, 等. 基于碳中和的人-机-料-法-环五位一体纺纱新技术解析[J]. 纺织学报, 2022, 43(1):58-66. |
| XIA Zhigang, XU Ao, WAN Youshun, et al. Analysis of new five-element-integration spinning technology based on human-machine-material-method-environment for carbon neutralization[J]. Journal of Textile Research, 2022, 43(1):58-66. | |
| [4] | 梅顺齐, 胡贵攀, 王建伟, 等. 纺织智能制造及其装备若干关键技术的探讨[J]. 纺织学报, 2017, 38(10):166-171. |
| MEI Shunqi, HU Guipan, WANG Jianwei, et al. Analysis of some key technology basis for intelligent textile manufacturing and its equipment[J]. Journal of Textile Research, 2017, 38(10):166-171. | |
| [5] | 柳威, 梅顺齐, 徐斯云, 等. 现代高速并条机的自动换筒技术[J]. 轻工机械, 2012, 30(6):86-90. |
| LIU Wei, MEI Shunqi, XU Siyun, et al. Automatic can change of the modern new high-speed drawing frame[J]. Light Industry Machinery, 2012, 30(6):86-90. | |
| [6] | 张洪, 魏毅, 陈瑞, 等. 整经机筒子架自动换筒机器人系统研发[J]. 上海纺织科技, 2020, 48(6): 10-13, 16. |
| ZHANG Hong, WEI Yi, CHEN Rui, et al. Research and development of automatic barrel changing robot system for warping machine's barrel frame[J]. Shanghai Textile Science & Technology, 2020, 48(6): 10-13, 16. | |
| [7] | 张洪, 魏毅, 李铬, 等. 基于机器人的整经机筒子架自动换筒系统研发[J]. 上海纺织科技, 2020, 48(4):25-28. |
| ZHANG Hong, WEI Yi, LI Ge, et al. Research and development of automatic tube changing system of warping machine creel based on robot[J]. Shanghai Textile Science & Technology, 2020, 48(4):25-28. | |
| [8] | 佘娟. 智能纱架的控制系统设计[D]. 上海: 东华大学, 2014:12-50. |
| SHE Juan. Design on control system of the intelligent creel robot[D]. Shanghai: Donghua University, 2014:12-56. | |
| [9] | 顾颖佳. 智能纱架机械手系统研制[D]. 上海: 东华大学, 2013:8-72. |
| GU Yingjia. The design of the system of the intelligent creel robot[D]. Shanghai: Donghua University, 2013:8-12. | |
| [10] | 徐造林, 程四新, 章友鹤. 自动化、智能化技术助推纺纱企业提质降耗、减员增效[J]. 纺织导报, 2019(4):62-67. |
| XU Zaolin, CHENG Sixin, ZHANG Youhe. Automation and intelligent technology promote the sustainable development of spinning enterprises[J]. China Textile Leader, 2019(4):62-67. | |
| [11] | 景军锋, 郭根. 基于机器视觉的丝饼毛羽检测[J]. 纺织学报, 2019, 40(1): 147-152. |
|
JING Junfeng, GUO Gen. Yarn packages hairiness detection based on machine vision[J]. Journal of Textile Research, 2019, 40(1): 147-152.
doi: 10.1177/004051757004000208 |
|
| [12] | 王鑫. 基于嵌入式系统的图像处理技术研究[D]. 北京: 中国科学院大学, 2015: 1-2. |
| WANG Xin. The research of image processing technology based on embedded system[D]. Beijing: University of Chinese Academy of Sciences, 2015: 1-2. |
| [1] | 王小虎, 潘如如, 高卫东, 周建. 基于稀疏字典优选的织物疵点检测方法[J]. 纺织学报, 2023, 44(08): 81-87. |
| [2] | 杨宏脉, 张效栋, 闫宁, 朱琳琳, 李娜娜. 一种高鲁棒性经编机上断纱在线检测算法[J]. 纺织学报, 2023, 44(05): 139-146. |
| [3] | 李杨, 彭来湖, 李建强, 刘建廷, 郑秋扬, 胡旭东. 基于深度信念网络的织物疵点检测[J]. 纺织学报, 2023, 44(02): 143-150. |
| [4] | 安亦锦, 薛文良, 丁亦, 张顺连. 基于图像处理的纺织品耐摩擦色牢度评级[J]. 纺织学报, 2022, 43(12): 131-137. |
| [5] | 张东剑, 甘学辉, 杨崇倡, 韩阜益, 刘香玉, 谈渊, 廖壑, 王松林. 纺丝过程中非接触式纤维张力检测技术研究进展[J]. 纺织学报, 2022, 43(11): 188-194. |
| [6] | 袁嫣红, 曾洪铭, 茅木泉. 基于图像处理的选针器检测系统[J]. 纺织学报, 2022, 43(10): 176-182. |
| [7] | 邓中民, 胡灏东, 于东洋, 王文, 柯薇. 结合图像频域和空间域的纬编针织物密度检测方法[J]. 纺织学报, 2022, 43(08): 67-73. |
| [8] | 马运娇, 王蕾, 潘如如, 高卫东. 基于平面镜成像的纱线条干三维合成校准方法[J]. 纺织学报, 2022, 43(07): 55-59. |
| [9] | 周其洪, 彭轶, 岑均豪, 周申华, 李姝佳. 基于机器视觉的细纱接头机器人纱线断头定位方法[J]. 纺织学报, 2022, 43(05): 163-169. |
| [10] | 张荣根, 冯培, 刘大双, 张俊平, 杨崇倡. 涤纶工业长丝毛丝在线检测系统的研究[J]. 纺织学报, 2022, 43(04): 153-159. |
| [11] | 熊晶晶, 杨雪, 苏静, 王鸿博. 基于图像技术的织物导湿性能测试方法[J]. 纺织学报, 2021, 42(12): 70-75. |
| [12] | 吕文涛, 林琪琪, 钟佳莹, 王成群, 徐伟强. 面向织物疵点检测的图像处理技术研究进展[J]. 纺织学报, 2021, 42(11): 197-206. |
| [13] | 徐晋, 杨鹏程, 肖渊, 胥光申. 织物表面导电线路喷射打印中微滴关键参数的视觉测量[J]. 纺织学报, 2021, 42(07): 137-143. |
| [14] | 夏旭文, 孟朔, 潘如如, 高卫东. 基于改进帧间差分法的经纱撞筘拥纱在线检测[J]. 纺织学报, 2021, 42(06): 91-96. |
| [15] | 江燕婷, 严庆帅, 辛斌杰, 高琮, 施楣梧. 纺织品单向导水性能测试方法分析[J]. 纺织学报, 2021, 42(05): 51-58. |
|
||
 京公网安备11010502044800号
京公网安备11010502044800号