纺织学报 ›› 2023, Vol. 44 ›› Issue (12): 197-204.doi: 10.13475/j.fzxb.20220604001
盛晓超1,2, 刘泽旭1,2, 胥光申1,2( ), 石英男1,2
), 石英男1,2
SHENG Xiaochao1,2, LIU Zexu1,2, XU Guangshen1,2(), SHI Yingnan1,2
摘要:
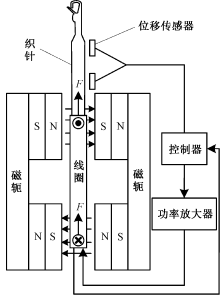
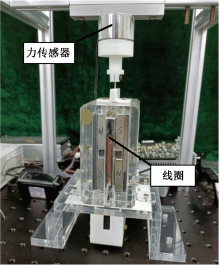
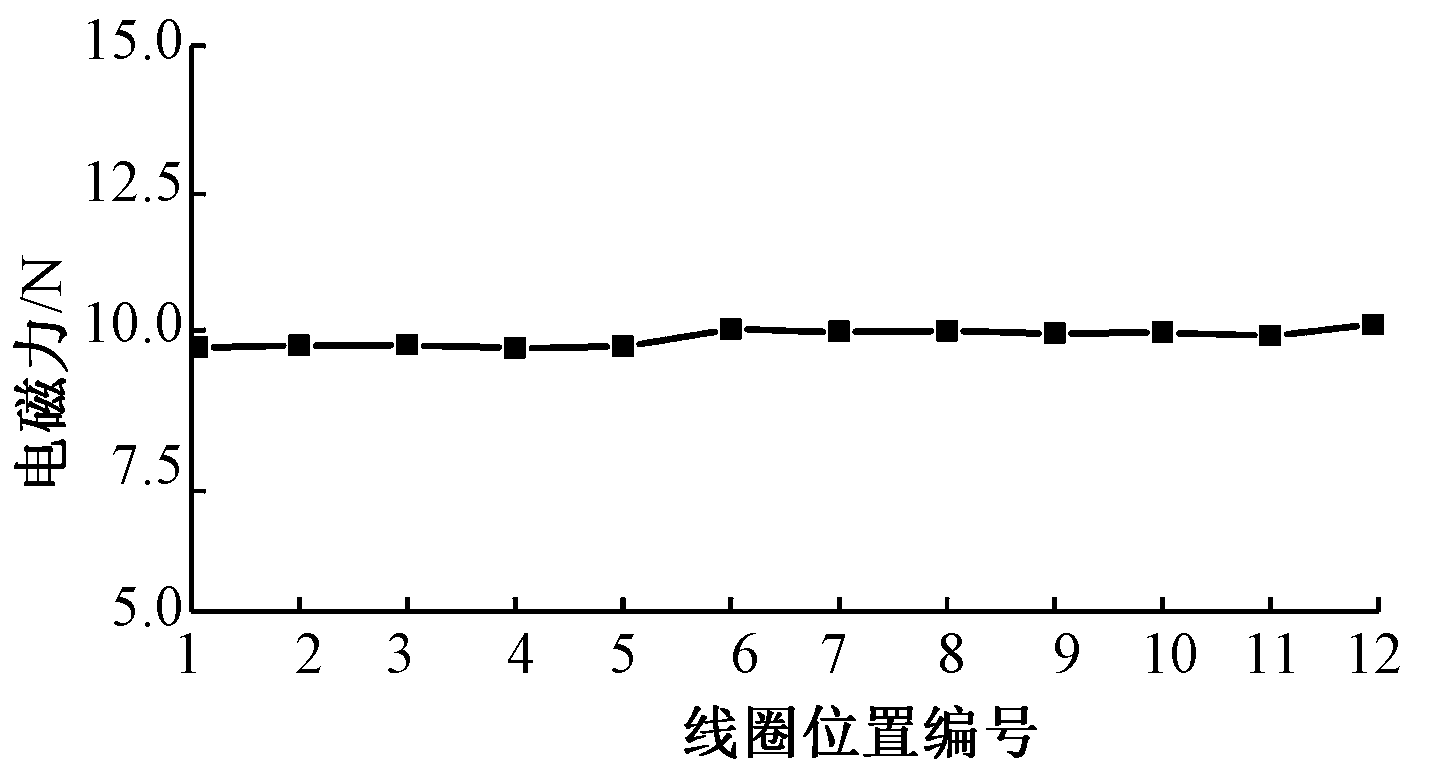
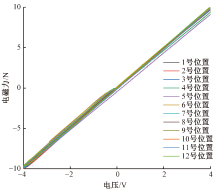
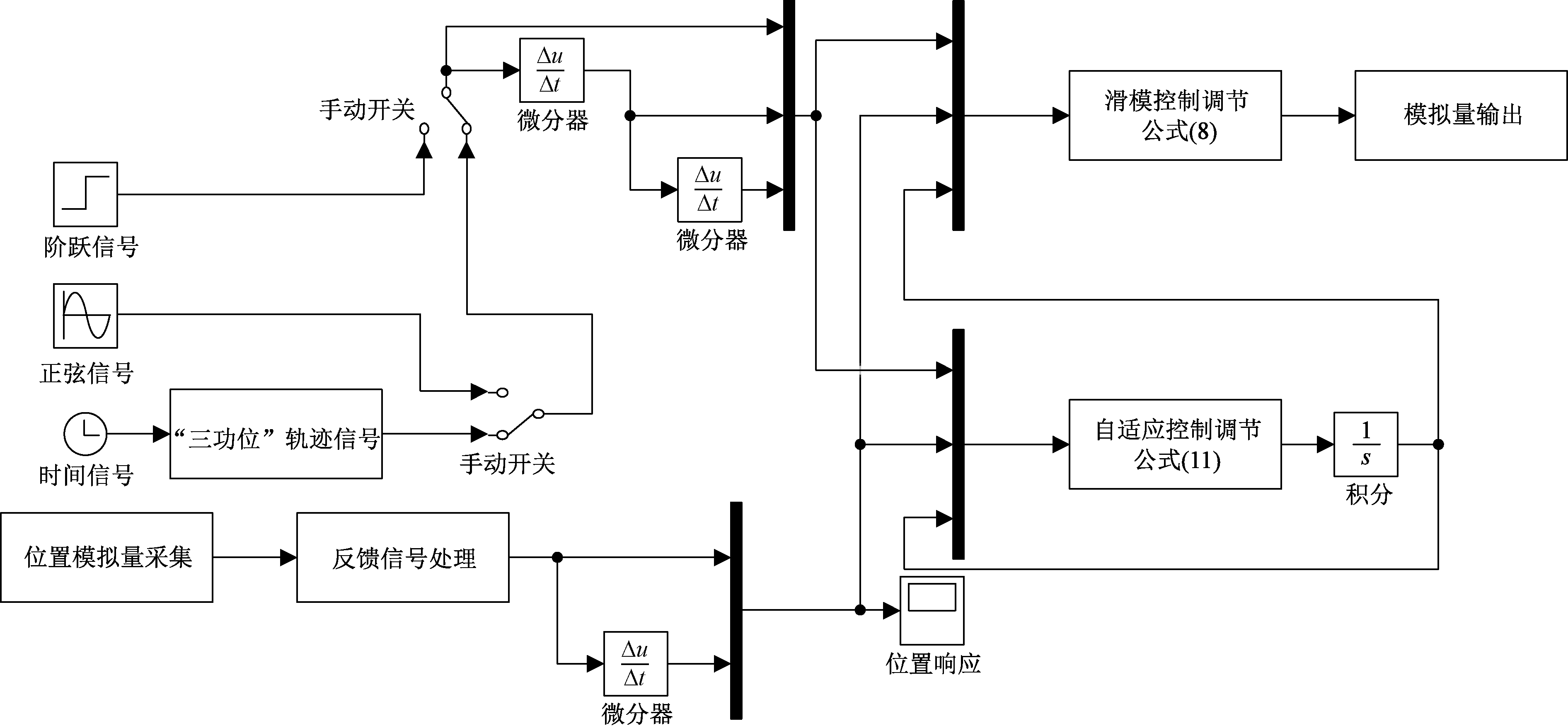
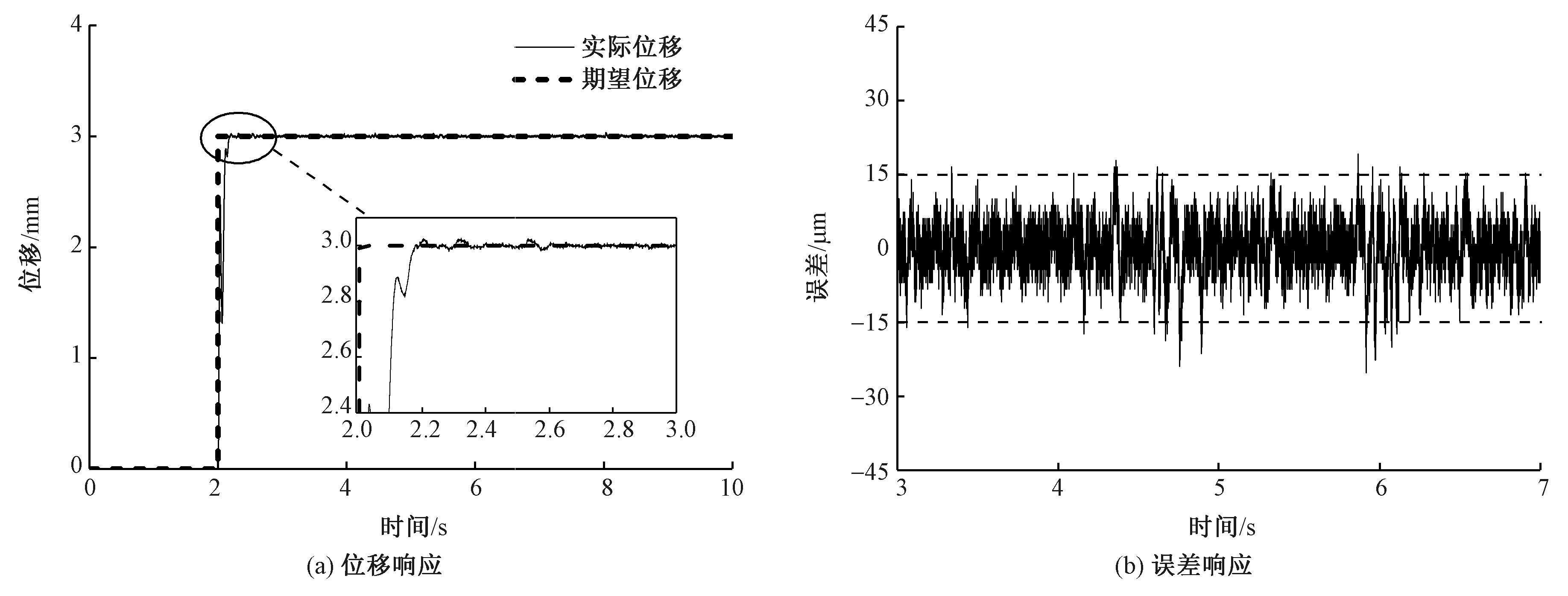
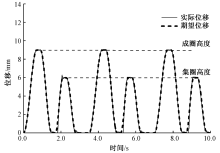
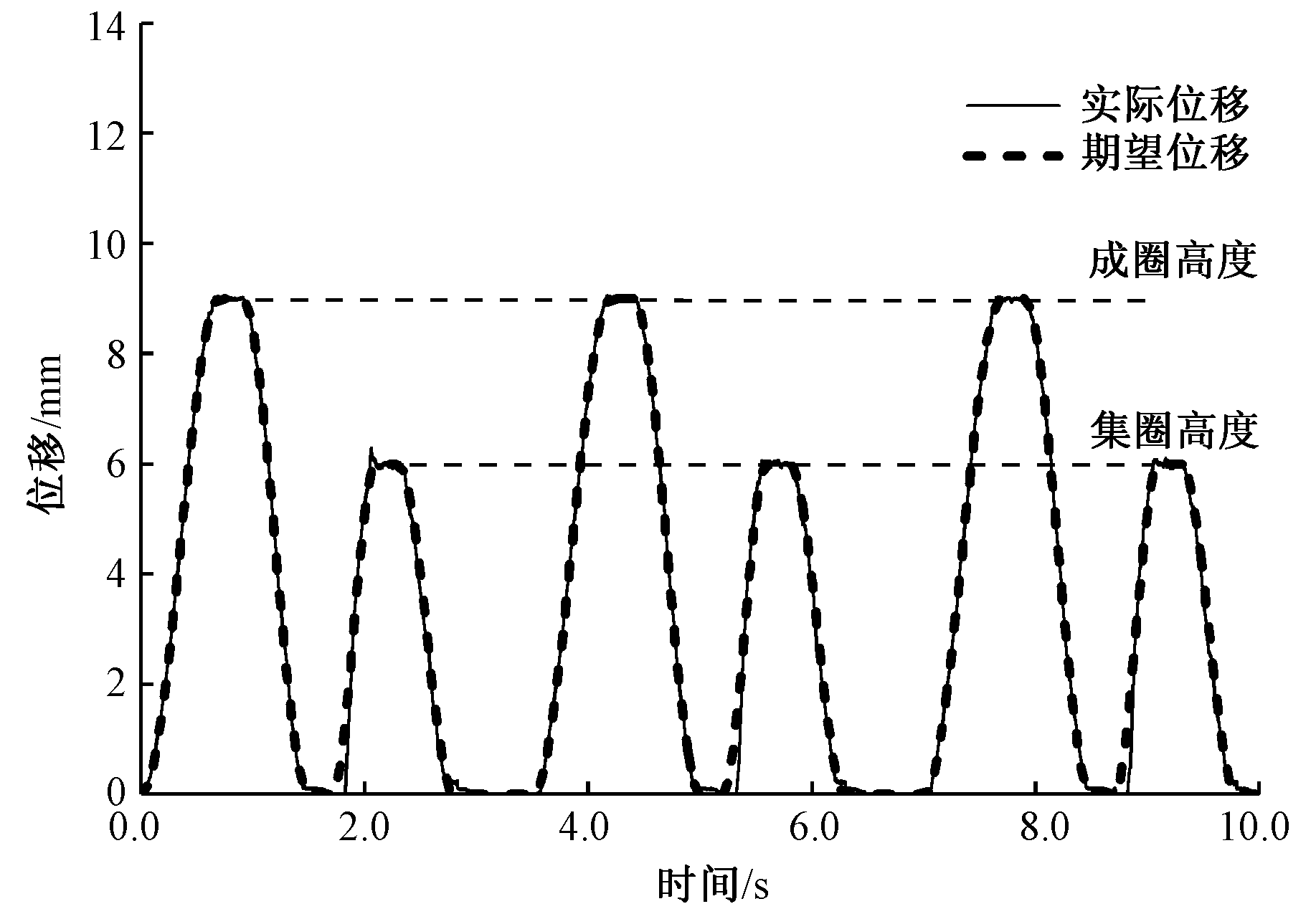
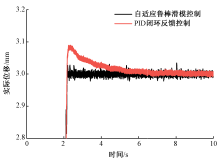
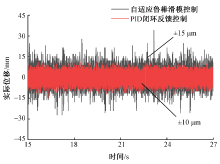
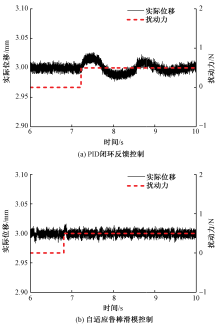
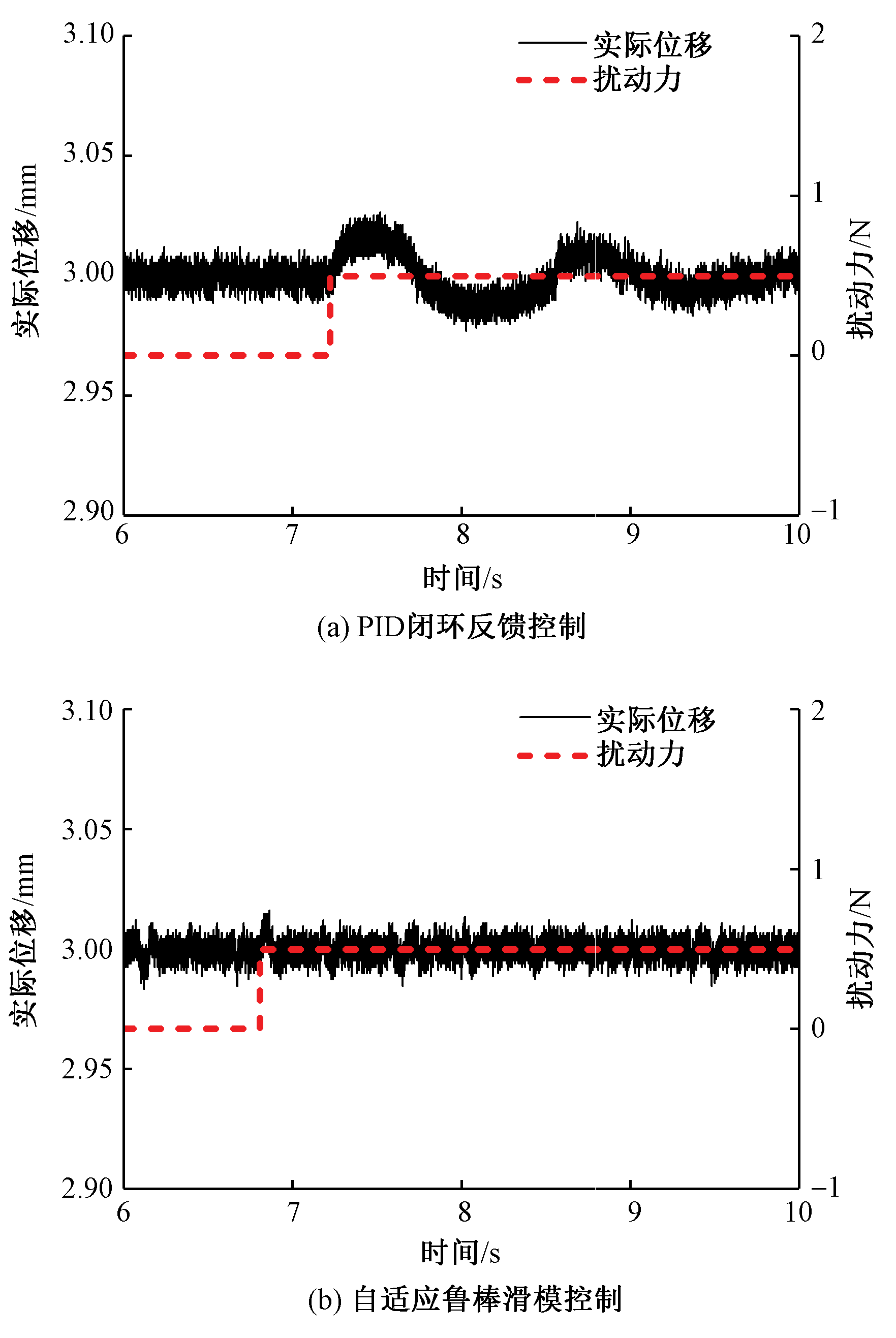
为解决传统织针驱动系统性能不佳以及磁阻式磁悬浮织针驱动系统的电磁力非线性问题,提出一种线性的洛伦兹力磁悬浮织针驱动系统。基于已有驱动系统实验平台,首先对系统的电磁力输出进行了测试,得出电磁力输出与线圈电流呈线性关系且与线圈所在磁场位置无关;其次设计了系统自适应鲁棒滑模控制器并进行实验,在该控制下织针0.6 s达到稳态且过程无超调量产生,系统具有较好的扰动抑制能力,且稳态误差保持在±15 μm之间;最后将自适应鲁棒滑模控制与比例积分微分(PID)闭环反馈控制的实验结果进行对比分析。实验结果表明,洛伦兹力磁悬浮织针驱动系统为线性系统,且线性度较高,自适应鲁棒滑模控制系统具有较好的控制效果,且与PID控制相比在提高响应速度、控制超调量与抗干扰方面具有明显优势。
中图分类号:
| [1] | 吴晓光, 孔令学, 朱里, 等. 磁悬浮式针织提花驱动方式理论研究与探讨[J]. 纺织学报, 2012, 33(10):128-133. |
| WU Xiaoguang, KONG Lingxue, ZHU Li, et al. Theoretical research on propulsion mode of magnetic suspension needles for jacquard knitting[J]. Journal of Textile Research, 2012, 33(10):128-133. | |
| [2] | 朱里, 吴晓光. 高速磁悬浮驱动方式下新型织针PID控制设计[J]. 针织工业, 2015(5):18-21. |
| ZHU Li, WU Xiaoguang. PID control and design of new knitting needle driven by high speed magnetic levita-tion[J]. Knitting Industries, 2015(5):18-21. | |
| [3] | 吴晓光, 朱里, 张驰, 等. 零传动模式的高速轴向悬浮织针运动控制与试验分析[J]. 纺织学报, 2016, 37(4):137-142. |
| WU Xiaoguang, ZHU Li, ZHANG Chi, et al. Motion control and experiment analysis of high speed axial suspension knitting needle in zero transmission[J]. Journal of Textile Research, 2016, 37(4):137-142. | |
| [4] | 万道玉, 吴晓光, 张弛, 等. 磁悬浮式驱动织针电磁力研究及线圈轮廓优化[J]. 针织工业, 2017(8):9-12. |
| WAN Daoyu, WU Xiaoguang, ZHANG Chi, et al. Electromagnetic force study of magnetic suspension driving knitting needle and coil profile optimization[J]. Knitting Industries, 2017(8):9-12. | |
| [5] | 吴晓光, 张弛, 徐秀升, 等. 双曲面线圈与永磁混合驱动悬浮织针样机研究[J]. 针织工业, 2017(11):6-10. |
| WU Xiaoguang, ZHANG Chi, XU Xiusheng, et al. Study of maglev knitting prototype driven by the combination of hyperboloid electromagnetic coil and permanent magnet[J]. Knitting Industries, 2017(11):6-10. | |
| [6] | 左小艳, 李冬冬, 张成俊, 等. 大行程磁悬浮织针驱动结构研究与仿真分析[J]. 针织工业, 2021(1):7-11. |
| ZUO Xiaoyan, LI Dongdong, ZHANG Chengjun, et al. Research and simulation analysis on large displacement magnet levitation knitting needle driving structure[J]. Knitting Industries, 2021(1):7-11. | |
| [7] | 李冬冬, 张成俊, 左小艳, 等. 混合磁悬浮织针驱动的永磁织针磁场分布规律[J]. 纺织学报, 2020, 41(9): 136-142. |
| LI Dongdong, ZHANG Chengjun, ZUO Xiaoyan, et al. Study on magnetic field distribution in permanent magnetic needle drive using hybrid magnetic suspension needle[J]. Journal of Textile Research, 2020, 41(9):136-142. | |
| [8] | 李冬冬, 张成俊, 左小艳, 等. 密绕线圈阵列结构对悬浮织针驱动性能的影响[J]. 纺织学报, 2021, 42(9): 156-162. |
| LI Dongdong, ZHANG Chengjun, ZUO Xiaoyan, et al. Influence of densely wound coil array structure on driving performance of suspended knitting needles[J]. Journal of Textile Research, 2021, 42(9):156-162. | |
| [9] | 刘泽旭, 胥光申, 盛晓超, 等. 洛伦兹力磁悬浮织针驱动器设计与仿真[J]. 纺织学报, 2021, 42(11):159-165. |
| LIU Zexu, XU Guangshen, SHENG Xiaochao, et al. Design and simulation of lorentz force actuated maglev knitting needle actuator[J]. Journal of Textile Research, 2021, 42(11):159-165. | |
| [10] | YANG Fei, ZHAO Yong, MU Xingke, et al. A novel 2-DOF lorentz force actuator for the modular magnetic suspension platform[J]. Sensors, 2020.DOI: 10.3390/s20164365. |
| [11] | 黄国燕, 朱敏. 基于状态空间的漂浮式风电机组控制策略研究[J]. 太阳能学报, 2021, 42(6):337-341. |
| HUANG Guoyan, ZHU Min. Control strategy research of floating wind turbines based on state-space[J]. Acta Energiae Solaris Sinica, 2021, 42(6):337-341. |
| [1] | 刘泽旭, 胥光申, 盛晓超, 代欣怡. 洛伦兹力磁悬浮织针驱动器设计与仿真[J]. 纺织学报, 2021, 42(11): 159-165. |
| [2] | 莫帅, 冯战勇, 党合玉, 邹振兴. 棉纺细纱锭子发展演变与研究展望[J]. 纺织学报, 2020, 41(06): 190-196. |
| [3] | 汪健东, 夏风林, 李亚林, 赵钰宁. 经编机梳栉电子横移伺服的最优滑模控制[J]. 纺织学报, 2020, 41(02): 143-148. |
| [4] | 汪松松, 彭来湖, 戴宁, 沈春娅, 胡旭东. 基于工业互联网的针织机械互联互通结构研究[J]. 纺织学报, 2020, 41(01): 165-173. |
| [5] | 吴晓光 袁博 雷小龙 张驰 孔令学. 电磁驱动磁悬浮式片梭引纬模式的建立与实验[J]. 纺织学报, 2017, 38(09): 142-148. |
| [6] | 吴强 马苏扬 廖萍. 磁悬浮拉幅定型传送单元[J]. 纺织学报, 2013, 34(9): 139-0. |
| [7] | 吴晓光 孔令学 朱里 武玉琴 黄振 李爽. 磁悬浮式针织提花驱动方式理论研究与探讨[J]. 纺织学报, 2012, 33(10): 128-133. |
| [8] | 霍铖宇 华强 卢达 范龙保 李新 徐刚. 基于虚拟仪器的针织机械用高速电磁阀测试系统[J]. 纺织学报, 2011, 32(10): 134-0. |
|
||
 京公网安备11010502044800号
京公网安备11010502044800号