纺织学报 ›› 2024, Vol. 45 ›› Issue (05): 239-247.doi: 10.13475/j.fzxb.20230500702
王建萍1,2,3,4, 朱妍西1,2, 沈津竹1,2, 张帆5, 姚晓凤1,2( ), 于卓灵1
), 于卓灵1
WANG Jianping1,2,3,4, ZHU Yanxi1,2, SHEN Jinzhu1,2, ZHANG Fan5, YAO Xiaofeng1,2(), YU Zhuoling1
摘要:
软体机器人由可变形材料制成,具有柔顺性高、适应性强等优势,现已成为机器人领域的研究热点,并在加速服装智能化进程中发挥重要作用。为促进软体机器人技术与服装领域的融合发展,根据当前软体机器人的研究进展,聚焦于软体机器人关键技术,总结其在制作材料、制作方法、驱动方式及控制与建模4个方面的研究现状;对软体机器人在纺织面料抓取与转移、上肢辅助及下肢辅助服装上的应用情况进行综述。研究认为:可利用智能软材料和微加工技术实现控制元件微型化;结合织物性能特点提高面料自动抓取与落料精度;可穿戴软体机器人在优化设备技术性能的同时,要对整个人机系统进行持续评估和迭代开发,提高人机交互便捷性,以促进软体机器人行业与服装领域的深度融合。
中图分类号:
| [1] |
王海涛, 彭熙凤, 林本末. 软体机器人研究进展[J]. 华南理工大学学报(自然科学版), 2020, 48(2): 94-106.
doi: 10.12141/j.issn.1000-565X.190685 |
| WANG Haitao, PENG Xifeng, LIN Benmo. Research progress of soft robot[J]. Journal of South China University of Technology (Natural Science Edition), 2020, 48(2): 94-106. | |
| [2] | 王延杰, 赵鑫, 王建峰, 等. 软体机器人驱动技术研究进展[J]. 液压与气动, 2022, 46(12): 1-11. |
| WANG Yanjie, ZHAO Xin, WANG Jianfeng, et al. Research progress of soft robot driving technology[J]. Chinese Hydraulics & Pneumatics, 2022, 46(12): 1-11. | |
| [3] | WALKER J, ZIDEK T, HARBEL C, et al. Soft robotics: a review of recent developments of pneumatic soft actuators[J]. Actuators, 2020.DOI:10.3390/act901003. |
| [4] | JUSTUS K, SAURABH S, BRUCHEZ M, et al. Integrating synthetic cells and flexible electronics for the control of bio-opto-fluidic materials[J]. Biophys J, 2014, 106(2): 617-618. |
| [5] |
KANG B B, CHOI H, LEE H, et al. Exo-Glove Poly II: a polymer-based soft wearable robot for the hand with a tendon-driven actuation system[J]. Soft Robot, 2019, 6(2): 214-227.
doi: 10.1089/soro.2018.0006 pmid: 30566026 |
| [6] | POURAZADI S, BUI H, MENON C. Investigation on a soft grasping gripper based on dielectric elastomer actuators[J]. Smart Mater Struct, 2019. DOI:10.1088/1361-665x/aaf767. |
| [7] | RENDA F, GIORELLI M, CALISTI M, et al. Dynamic model of a multibending soft robot arm driven by cables[J]. IEEE Trans Robot, 2014, 30(5): 1109-1122. |
| [8] | 夏明. 智能制造在纺织服装工业的应用现状与展望[J]. 中国纺织, 2019(11): 168-169. |
| XIA Ming. Application status and prospect of intelligent manufacturing in textile and garment industry[J]. China Textiles, 2019(11): 168-169. | |
| [9] | POLYGERINOS P, WANG Z, GALLOWAY K C, et al. Soft robotic glove for combined assistance and at-home rehabilitation[J]. Robot Auton Syst, 2015, 73: 135-143. |
| [10] | WANG X L, GUO R, LIU J. Liquid metal based soft robotics: materials, designs, and applications[J]. Adv Mater Technol, 2019.DOI:10.1002/admt.201800549, 4(2): 15. |
| [11] | 雷静, 葛正浩, 覃兴蒙, 等. 软体机器人驱动方式与制造工艺研究进展[J]. 微纳电子技术, 2022, 59(6): 505-515/599. |
| LEI Jing, GE Zhenghao, QIN Xingmeng, et al. Research progress on driving mode and manufacturing process of soft robot[J]. Micro and Nano Electronics Technology, 2022, 59(06): 505-515/599. | |
| [12] | SCHMITT F, PICCIN O, BARBE L, et al. Soft robots manufacturing: a review[J]. Frontiers in Robotics and AI, 2018.DOI:10.3389/frobt.2018.00084. |
| [13] | SURESH S A, CHRISTENSEN D L, HAWKES E W, et al. Surface and shape deposition manufacturing for the fabrication of a curved surface gripper[J]. J Mech Robot, 2015.DOI:10.1115/1.4029492. |
| [14] |
王永青, 邓建辉, 李特, 等. 软体机器人3D打印制造技术研究综述[J]. 机械工程学报, 2021, 57(15): 186-198.
doi: 10.3901/JME.2021.15.186 |
| WANG Yongqing, DENG Jianhui, LI Te, et al. Research review of soft robot 3D printing manufacturing techno-logy[J]. Chinese Journal of Mechanical Engineering, 2021, 57(15): 186-198. | |
| [15] | BARTLETT, NICHOLAS W, WEAVER, et al. A 3D-printed, functionally graded soft robot powered by combustion[J]. Science, 2015, 349(6244): 161-165. |
| [16] | SCHARFF R B N, DOUBROVSKI E L, POELMAN W A, et al. Towards behavior design of a 3D-printed soft robotic hand[C]// 2016 Soft Robotics Week - Trends, Applications and Challenges. Livorno: 2017: 23-29. |
| [17] |
王红红, 杜敬利, 保宏. 肌腱驱动连续体/软体机器人控制策略[J]. 机器人, 2020, 42(5): 626-639.
doi: 10.13973/j.cnki.robot.190535 |
|
WANG Honghong, DU Jingli, BAO Hong. Tendon driven continuum/soft robot control strategy[J]. Robot, 2020, 42(5): 626-639.
doi: 10.13973/j.cnki.robot.190535 |
|
| [18] | 徐丰羽, 孟凡昌, 范保杰, 等. 软体机器人驱动、建模与应用研究综述[J]. 南京邮电大学学报(自然科学版), 2019, 39(3): 64-75. |
| XU Fengyu, MENG Fanchang, FAN Baojie, et al. Research review on software robot drive, modeling and application[J]. Journal of Nanjing University of Posts and Telecommunications (Natural Science Edition), 2019, 39(3): 64-75. | |
| [19] | NAKAMURA T, AL-SARAWI S F. Experimental comparisons between McKibben type artificial muscles and straight fibers type artificial muscles[C]// Conference on Smart Structures, Devices, and Systems III. Adelaide: SPIE, 2006. DOI: 10.1117/12.698845. |
| [20] |
PARK S J, KIM U, PARK C H. A novel fabric muscle based on shape memory alloy springs[J]. Soft Robot, 2020, 7(3): 321-331.
doi: 10.1089/soro.2018.0107 pmid: 31724903 |
| [21] |
PELRINE R, KORNBLUH R, PEI Q B, et al. High-speed electrically actuated elastomers with strain greater than 100%[J]. Science, 2000, 287(5454): 836-839.
pmid: 10657293 |
| [22] | WEHNER M, TRUBY R L, FITZGERALD D J, et al. An integrated design and fabrication strategy for entirely soft, autonomous robots[J]. Nature, 2016, 536 (7617): 451-455. |
| [23] | 杨妍, 刘志杰, 韩江涛, 等. 软体机械臂的驱动方式、建模与控制研究进展[J]. 工程科学学报, 2022, 44(12):2124-2137. |
| YANG Yan, LIU Zhijie, HAN Jiangtao, et al. Research progress on driving mode, modeling and control of soft manipulator[J]. Journal of Engineering Science, 2022, 44(12):2124-2137. | |
| [24] | RUS D, TOLLEY M T. Design, fabrication and control of soft robots[J]. Nature, 2015, 521(7553): 467-475. |
| [25] | WEBSTER R J, JONES B A. Design and kinematic modeling of constant curvature continuum robots: a review[J]. Int J Robot Res, 2010, 29(13): 1661-1683. |
| [26] |
MUSTAZA S M, ELSAYED Y, LEKAKOU C, et al. Dynamic modeling of fiber-reinforced soft manipulator: a visco-hyperelastic material-based continuum mechanics approach[J]. Soft Robot, 2019, 6(3): 305-317.
doi: 10.1089/soro.2018.0032 pmid: 30917093 |
| [27] | 蒋国平, 孟凡昌, 申景金, 等. 软体机器人运动学与动力学建模综述[J]. 南京邮电大学学报(自然科学版), 2018, 38(1): 20-26. |
| JIANG Guoping, MENG Fanchang, SHEN Jingjin, et al. Kinematics and dynamics modeling of soft robot[J]. Journal of Nanjing University of Posts and Telecommunications (Natural Science Edition), 2018, 38(1): 20-26. | |
| [28] |
THURUTHEL T G, ANSARI Y, FALOTICO E, et al. Control strategies for soft robotic manipulators: a survey[J]. Soft Robot, 2018, 5(2): 149-163.
doi: 10.1089/soro.2017.0007 pmid: 29297756 |
| [29] | XU F, WANG H S, AU K W S, et al. Underwater dynamic modeling for a cable-driven soft robot arm[J]. IEEE-ASME Trans Mechatron, 2018, 23(6): 2726-2738. |
| [30] | BEST C M, GILLESPIE M T, HYATT P, et al. A new soft robot control method using model predictive control for a pneumatically actuated humanoid[J]. IEEE Robot Autom Mag, 2016, 23(3): 75-84. |
| [31] | GIORELLI M, RENDA F, FERRI G, et al. A feed-forward neural network learning the inverse kinetics of a soft cable-driven manipulator moving in three-dimensional space[C]// 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Tokyo: IEEE, 2013: 5033-5039. |
| [32] | SU J Q, SHEN J Z, ZHANG F. Grasping model of fabric cut pieces for robotic soft fingers[J]. Textile Research Journal, 2022, 92(13/14): 2223-2238. |
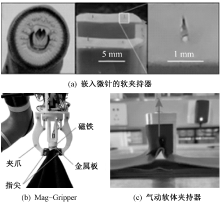
| [33] | KU S, MYEONG J, KIM H Y, et al. Delicate fabric handling using a soft robotic gripper with embedded microneedles[J]. IEEE Robot Autom Lett, 2020, 5(3): 4852-4858. |
| [34] | MARULLO S, BARTOCCINI S, SALVIETTI G, et al. The mag-gripper: a soft-rigid gripper augmented with an electromagnet to precisely handle clothes[J]. IEEE Robot Autom Lett, 2020, 5(4): 6591-6598. |
| [35] | SU J Q, WANG N, ZHANG F. A design of bionic soft gripper for automatic fabric grasping in apparel manufacturing[J]. Textile Research Journal, 2023, 93(7/8): 1587-1601. |
| [36] | EBRAHEEM Y, DREAN E, ADOLPHE D C. Universal gripper for fabrics-design, validation and integrat-ion[J]. Int J Cloth Sci Technol, 2021, 33(4): 643-663. |
| [37] | QIU S, PEI Z C, WANG C, et al. Systematic review on wearable lower extremity robotic exoskeletons for assisted locomotion[J]. J Bionic Eng, 2023, 20(2): 436-469. |
| [38] | PAN M, YUAN C G, LIANG X R, et al. Soft actuators and robotic devices for rehabilitation and assist-ance[J]. Adv Intell Syst, 2022, 4(4): 25. |
| [39] | 张捷, 李源莉, 孟铭强. 脑卒中手功能康复机器人应用研究[J]. 华东科技, 2022(5): 108-113. |
| ZHANG Jie, LI Yuanli, MENG Mingqiang. Application of hand function rehabilitation robot for cerebral apo-plexy[J]. East China Science and Technology, 2022(5): 108-113. | |
| [40] | CHU C Y, PATTERSON R M. Soft robotic devices for hand rehabilitation and assistance: a narrative review[J]. J NeuroEng Rehabil, 2018, 15: 14. |
| [41] | AL-FAHAAM H, DAVIS S, NEFTI-MEZIANI S, et al. Novel soft bending actuator-based power augmentation hand exoskeleton controlled by human intention[J]. Intell Serv Robot, 2018, 11(3): 247-268. |
| [42] | IN H, KANG B B, SIN M, et al. Exo-Glove a wearable robot for the hand with a soft tendon routing system[J]. IEEE Robot Autom Mag, 2015, 22(1): 97-105. |
| [43] | JIRALERSPONG T, HEUNG K H L, TONG R K Y, et al. A novel soft robotic glove for daily life assist-ance[C]// 2018 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (BIOROB), Enschede: IEEE, 2018: 671-676. |
| [44] | 刘彩霞, 潘亭亭, 孙一帆, 等. 用于康复训练的分段式气动软体驱动器[J]. 浙江大学学报(工学版), 2022, 56(6): 1127-1134. |
| LIU Caixia, PAN Tingting, SUN Yifan, et al. Segmented pneumatic soft actuator for rehabilitation training[J]. Journal of Zhejiang University (Engineering Science), 2022, 56(6): 1127-1134. | |
| [45] |
郭建, 廖泰明, 郑兴强. 可穿戴式上肢康复机器人运动学计算和仿真[J]. 机床与液压, 2023, 51(3): 78-84.
doi: 10.3969/j.issn.1001-3881.2023.03.013 |
| GUO Jian, LIAO Taiming, ZHENG Xingqiang. Kinematics calculation and simulation of wearable upper limb rehabilitation robot[J]. Machine Tool & Hydraulics, 2023, 51(3): 78-84. | |
| [46] | O'NEILL C T, PHIPPS N S, CAPPELLO L, et al. A soft wearable robot for the shoulder: design, characterization, and preliminary testing[C]// 2017 International Conference on Rehabilitation Robotics (ICORR). London: IEEE, 2017: 1672-1678. |
| [47] | LESSARD S, PANSODTEE P, ROBBINS A, et al. A soft exosuit for flexible upper-extremity rehabili-tation[J]. IEEE Trans Neural Syst Rehabil Eng, 2018, 26(8): 1604-1617. |
| [48] | WILKENING A, STPPLER H, IVLEV O. Adaptive assistive control of a soft elbow trainer with self-alignment using pneumatic bending joint[C]// 2015 14th IEEE/RAS-EMBS International Conference on Rehabilitation Robotics (ICORR). Singapore: IEEE, 2015: 729-734. |
| [49] | PARK S J, PARK C H. Suit-type wearable robot powered by shape-memory-alloy-based fabric muscle[J]. Scientific Reports, 2019, 9(1): 1-8. |
| [50] |
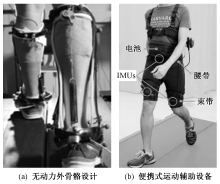
KIM J, LEE G, HEIMGARTNER R, et al. Reducing the metabolic rate of walking and running with a versatile, portable exosuit[J]. Science, 2019, 365(6454): 668-672.
doi: 10.1126/science.aav7536 pmid: 31416958 |
| [51] | SHIN S Y, HOHL K, GIFFHORN M, et al. Soft robotic exosuit augmented high intensity gait training on stroke survivors: a pilot study[J]. J NeuroEng Rehabil, 2022, 19(1): 12. |
| [52] | HEUNG K, TANG Z Q, HO L, et al. Design of a 3D printed soft robotic hand for stroke rehabilitation and daily activities assistance[C]// 2019 IEEE 16th International Conference on Rehabilitation Robotics (ICORR). Toronto: IEEE, 2019: 65-70. |
| [53] | COLLINS S H, WIGGIN M B, SAWICKI G S. Reducing the energy cost of human walking using an unpowered exoskeleton[J]. Nature, 2015, 522(7555): 212-215. |
| [54] | YANDELL M B, TACCA J R, ZELIK K E. Design of a low profile, unpowered ankle exoskeleton that fits under clothes: overcoming practical barriers to widespread societal adoption[J]. IEEE Trans Neural Syst Rehabil Eng, 2019, 27(4): 712-723. |
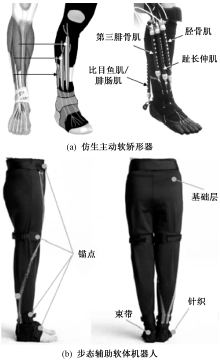
| [55] | LEE G, KIM J, PANIZZOLO F A, et al. Reducing the metabolic cost of running with a tethered soft exosuit[J]. Sci Robot, 2017. DOI:10-1126/scirobotics.aan6708. |
| [56] | PARK Y L, CHEN B R, PEREZ-ARANCIBIA N O, et al. Design and control of a bio-inspired soft wearable robotic device for ankle-foot rehabilitation[J]. Bioinspir Biomim, 2014. DOI:1001088/1748-3182/9711016007. |
| [57] | KIM C, KIM G, LEE Y, et al. Shape memory alloy actuator-embedded smart clothes for ankle assist-ance[J]. Smart Mater Struct, 2020. DOI:10-1088/1361-655x/0107865. |
| [58] | KOO S H, LEE Y B, KIM C, et al. Development of gait assistive clothing-typed soft wearable robot for elderly adults[J]. Int J Cloth Sci Technol, 2021, 33(4): 513-541. |
| [59] | WALSH C. Human-in-the-loop development of soft wearable robots[J]. Nat Rev Mater, 2018, 3(6): 78-80. |
| [60] | 董效, 冯显英. 软体机器人研究现状及展望[J]. 现代制造技术与装备, 2022, 58(9):70-73. |
| DONG Xiao, FENG Xianying. Research status and prospect of soft robot[J]. Modern Manufacturing Technology & Equipment, 2022, 58(9):70-73. | |
| [61] | SU J Q, SHEN J Z, LYU J. Arrangement of soft fingers for automatic grasping of fabric pieces of garment[J]. Textile Research Journal, 2022, 92(1/2): 143-159. |
| [62] | KIM D, KANG B B, KIM K B, et al. Eyes are faster than hands: a soft wearable robot learns user intention from the egocentric view[J]. Sci Robot, 2019, 4(26): 3. |
| [63] | DINH B K, XILOYANNIS M, ANTUVAN C W, et al. Hierarchical cascade controller for assistance modulation in a soft wearable arm exoskeleton[J]. IEEE Robot Autom Lett, 2017, 2(3): 1786-1793. |
| [1] | 鞠宇, 王朝晖, 李博一, 叶勤文. 基于机器学习的服装生产线员工效率预测[J]. 纺织学报, 2024, 45(05): 183-192. |
| [2] | 马梓鸿, 陈慧敏, 丁孟孟, 岳晓丽. 面料堆垛非接触式分层吸附工艺模型与系统构建[J]. 纺织学报, 2024, 45(05): 209-217. |
| [3] | 王馨雨, 田明伟. 具有距离监测与辅助提示功能的自闭症儿童智能服装设计[J]. 纺织学报, 2024, 45(03): 156-162. |
| [4] | 王中昱, 苏云, 王云仪. 机器学习建立的个体热舒适模型及其在服装领域的应用展望[J]. 纺织学报, 2023, 44(05): 228-236. |
| [5] | 王晨露, 马金星, 杨雅晴, 韩潇, 洪剑寒, 占海华, 杨施倩, 姚绍芳, 刘姜乔娜. 聚苯胺涂层经编织物的应变传感性能及其在呼吸监测中的应用[J]. 纺织学报, 2022, 43(08): 113-118. |
| [6] | 黄锐, 肖爱民. 基于温湿度传感器的特护失禁内裤的研发[J]. 纺织学报, 2022, 43(07): 141-148. |
| [7] | 郑路, 颜伟雄, 胡觉亮, 韩曙光. 基于模块化的服装混合流水线平衡优化[J]. 纺织学报, 2022, 43(04): 140-146. |
| [8] | 林文君, 缪旭红. 光导纤维在发光织物上的应用研究进展[J]. 纺织学报, 2021, 42(07): 169-174. |
| [9] | 李一飞, 郑敏, 常朱宁子, 李丽艳, 曹元鸣, 翟旺宜. 二维过渡金属碳化物(Ti3C2Tx)对棉针织物的功能整理及其性能分析[J]. 纺织学报, 2021, 42(06): 120-127. |
| [10] | 王玉婷, 凌忠文, 杨欣, 刘宇清. 纳米氧化钨复合棉纤维的制备及其光致变色性能[J]. 纺织学报, 2021, 42(02): 21-26. |
| [11] | 金鹏, 薛哲彬, 戈垚. 具有实时瓦斯监测功能的新型智能矿工服设计[J]. 纺织学报, 2020, 41(11): 143-149. |
| [12] | 沈津竹, 赵晓露, 张帆, 俞青, 苏军强. 柔性康复手套设计与工效性评价[J]. 纺织学报, 2020, 41(09): 119-127. |
| [13] | 黄珍珍, 莫碧贤, 温李红. 基于遗传算法及仿真技术的服装生产流水线平衡[J]. 纺织学报, 2020, 41(07): 154-159. |
| [14] | 张佳慧, 王建萍. 圆形纬编针织物电极导电性能及电阻理论模型构建[J]. 纺织学报, 2020, 41(03): 56-61. |
| [15] | 李柽安, 鲁虹. 腰部运动损伤防护智能服装的研发[J]. 纺织学报, 2020, 41(02): 119-124. |
|
||
 京公网安备11010502044800号
京公网安备11010502044800号