纺织学报 ›› 2024, Vol. 45 ›› Issue (06): 193-200.doi: 10.13475/j.fzxb.20230304201
毛慧敏1, 屠佳佳1,2, 孙磊1, 戴宁1, 史伟民1( )
)
MAO Huimin1, TU Jiajia1,2, SUN Lei1, DAI Ning1, SHI Weimin1()
摘要:
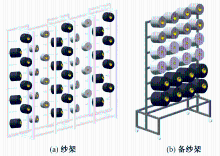
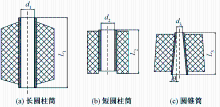
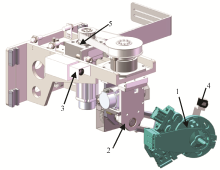
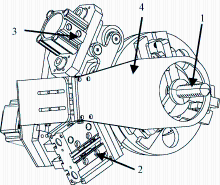
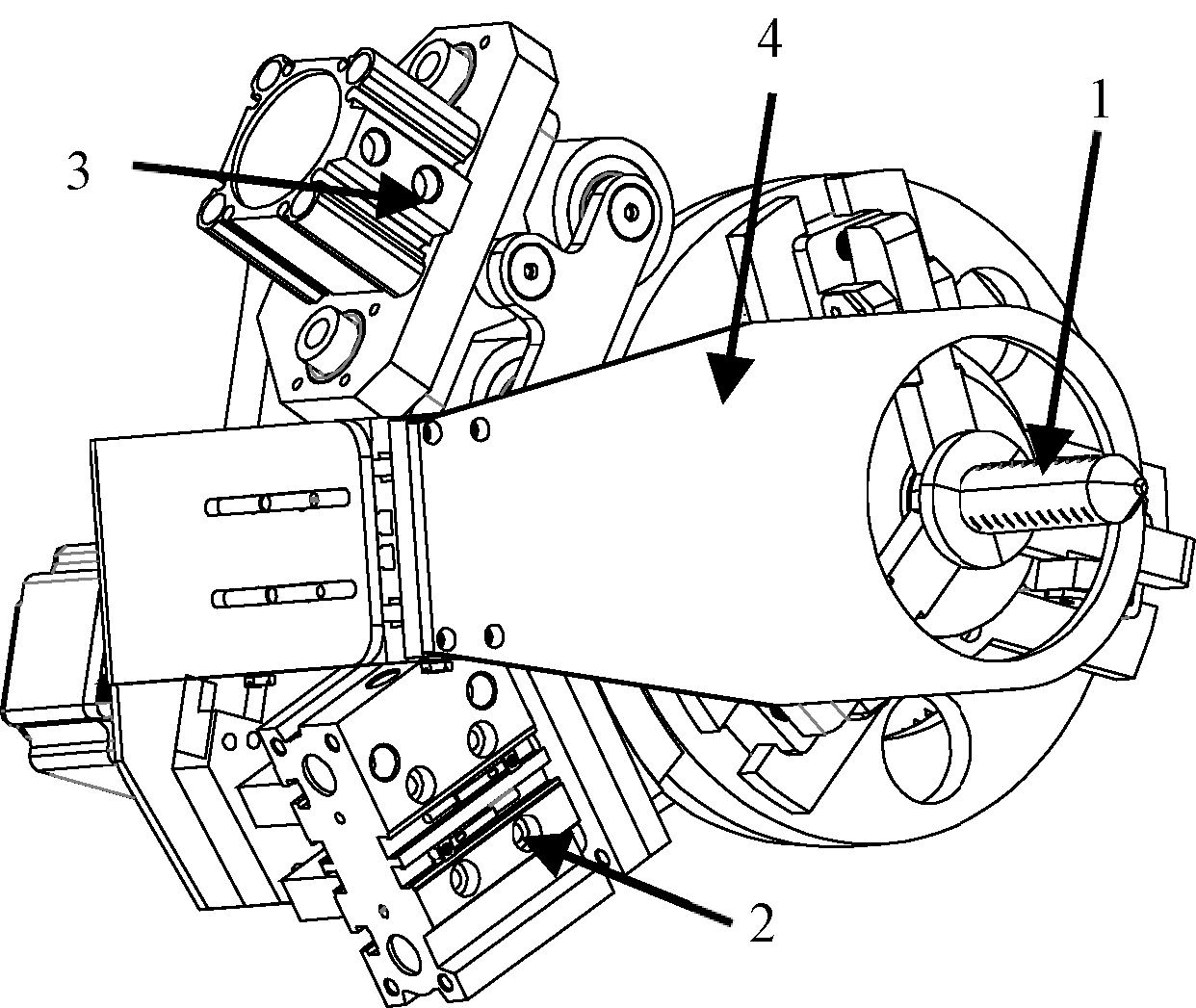
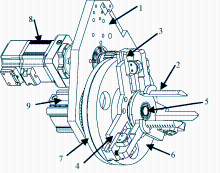
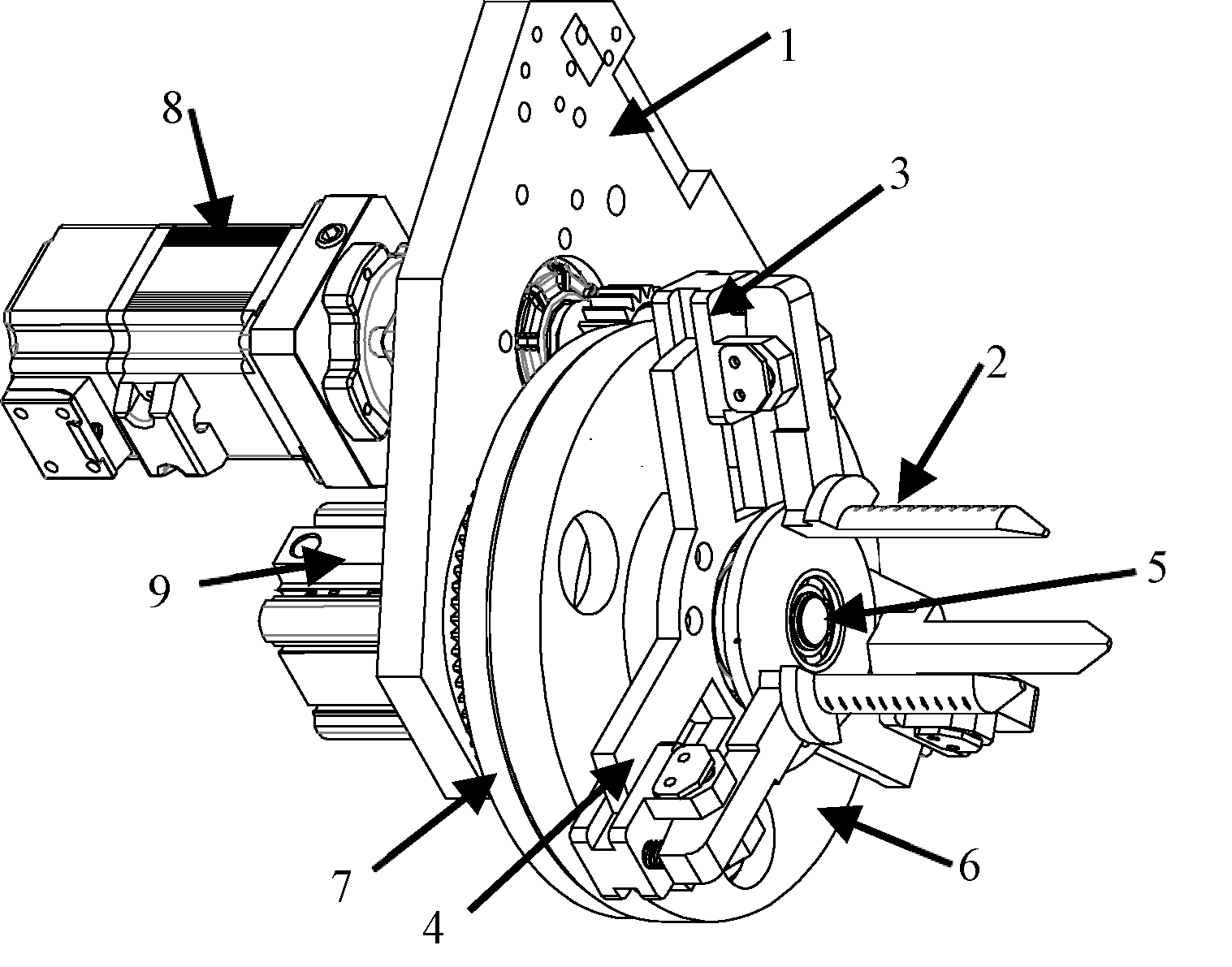
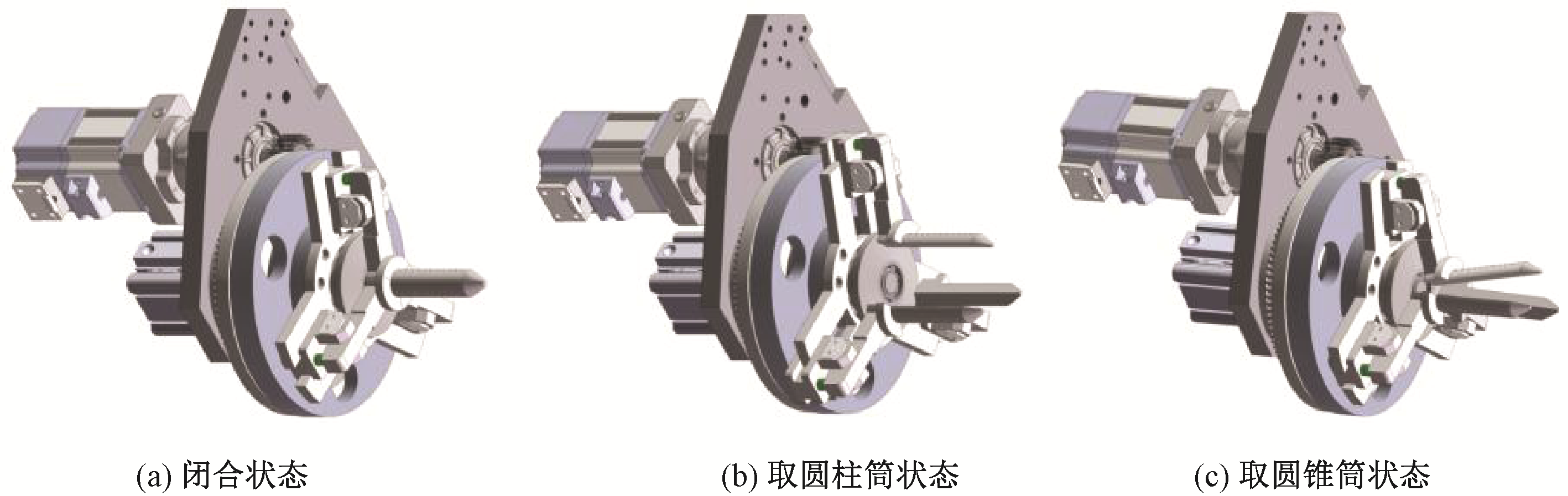
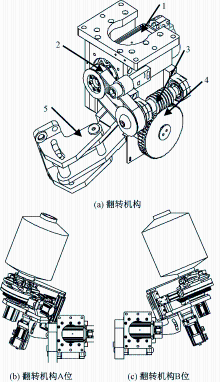
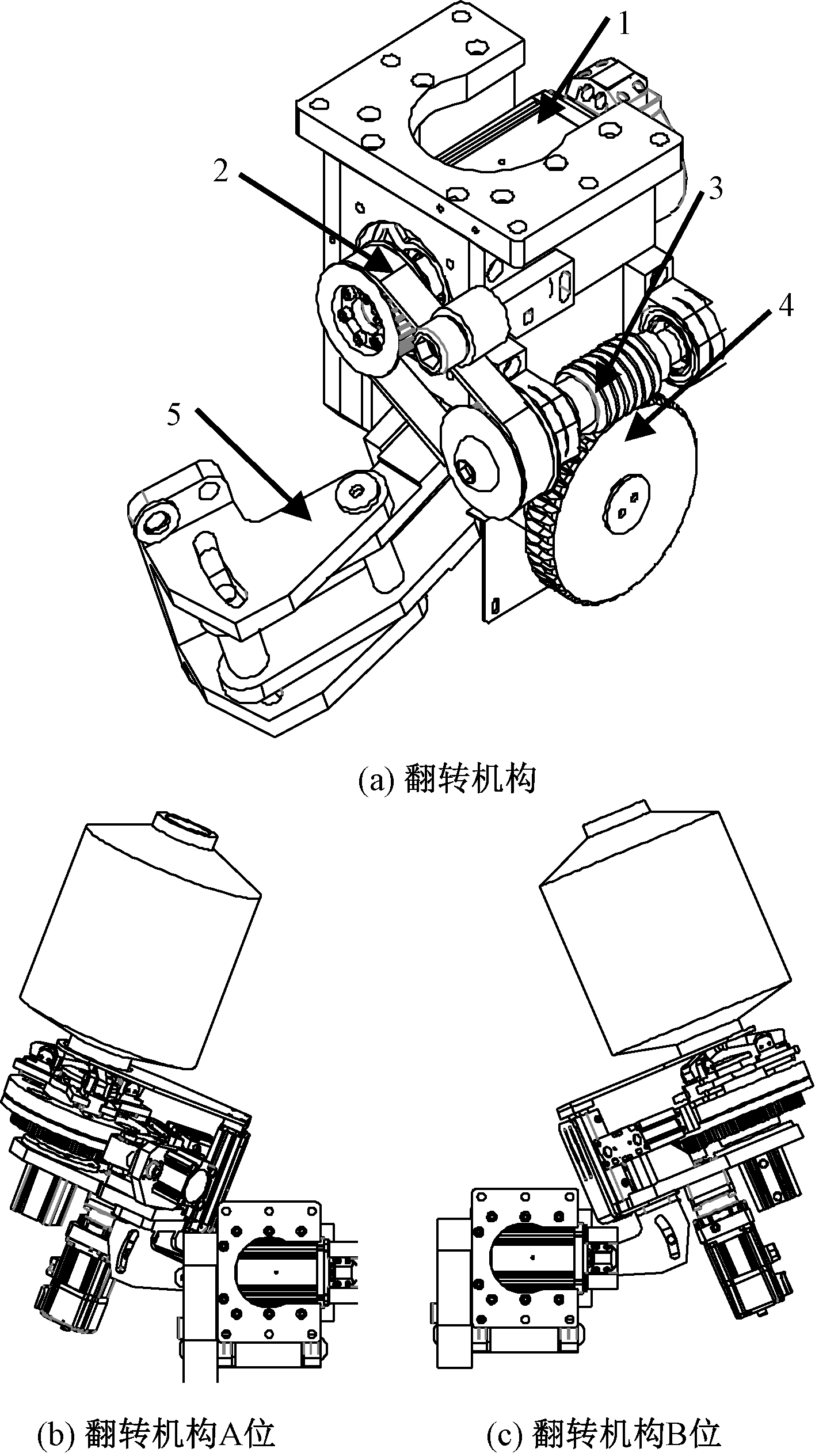
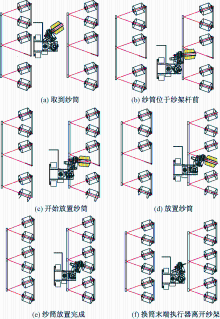
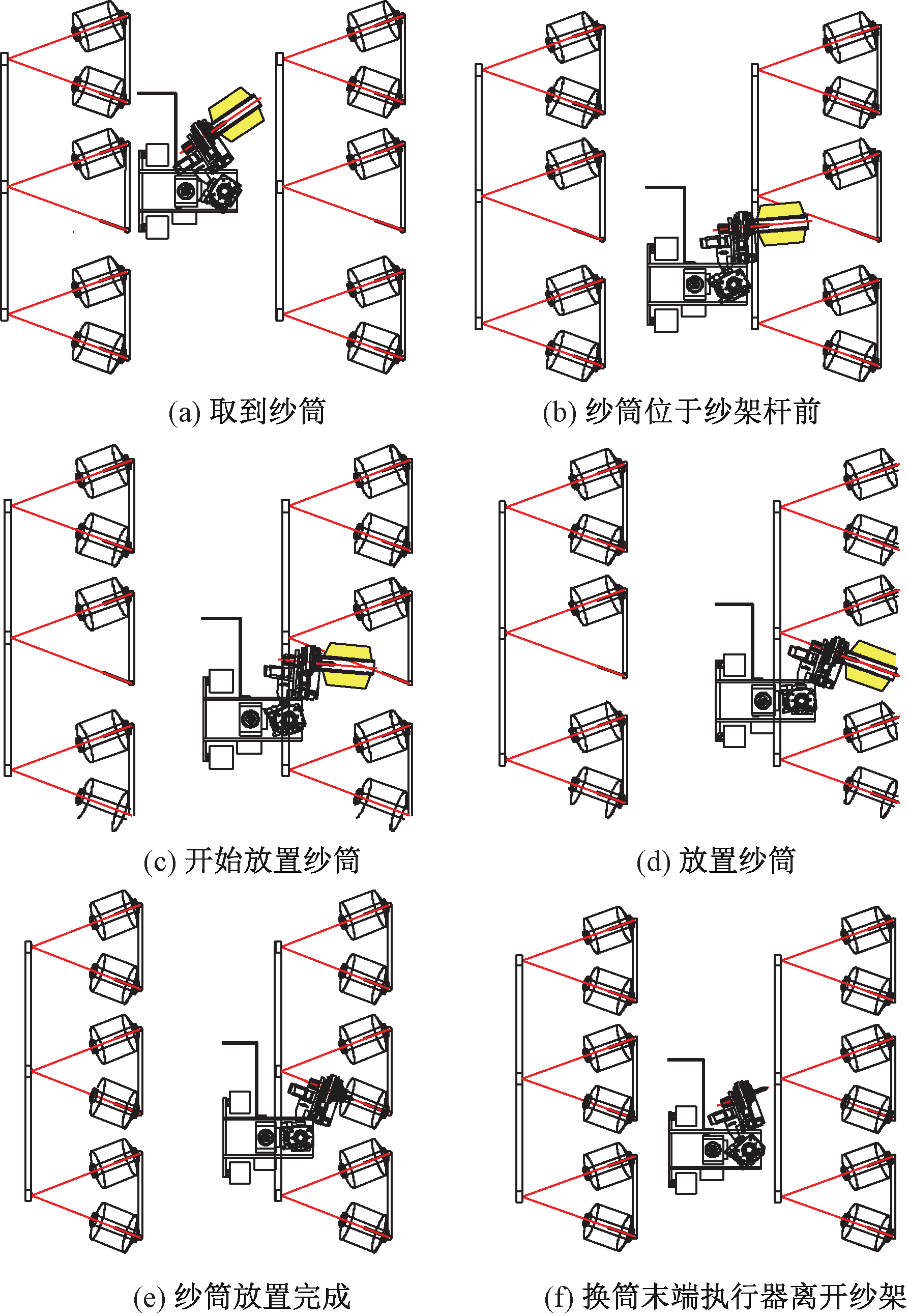
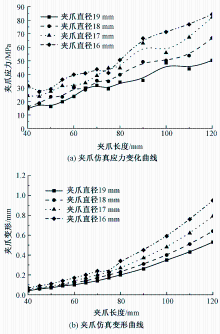
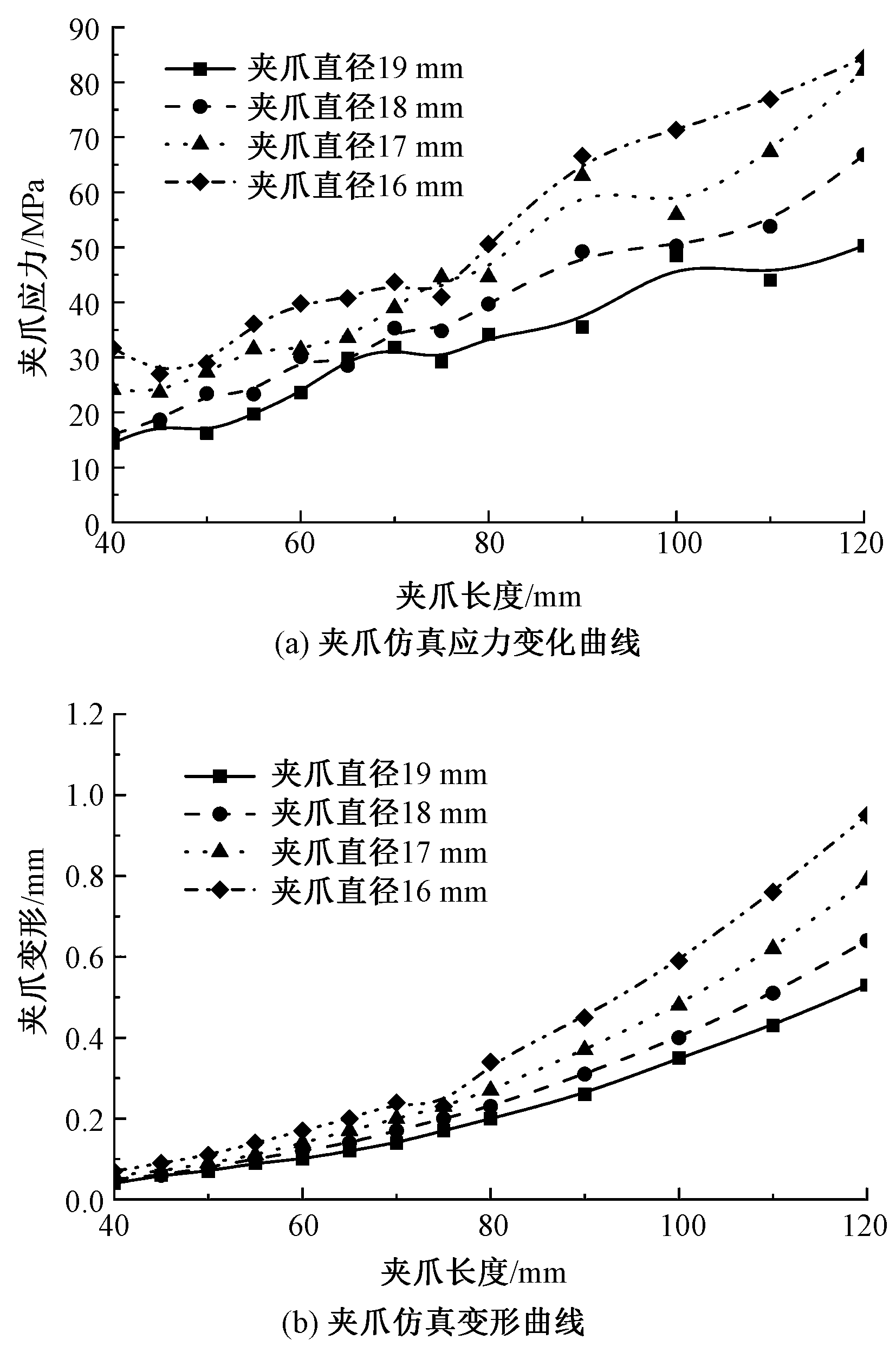
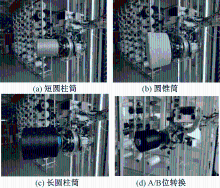
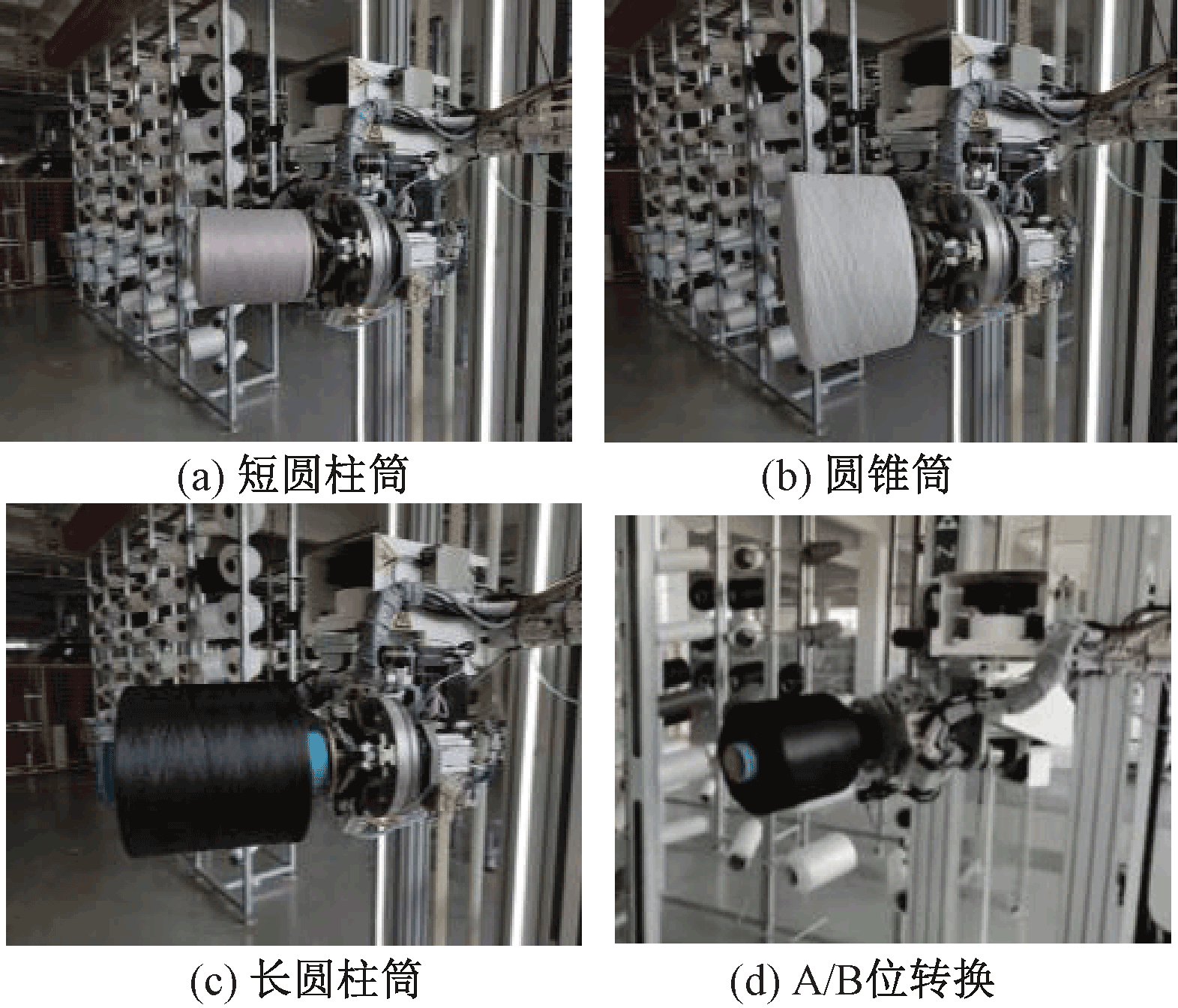
为解决现有换筒夹持机构无法适用于不同规格纱筒抓取的问题,根据针织生产车间纱架结构特征和纱筒更换工艺流程,设计了由夹爪机构、刹车机构、离合机构、推纱机构、翻转机构等组成的换筒末端执行器,该末端执行器可通过外扩电动机和外张气缸分别调节夹爪收缩尺寸以及夹爪间角度,以适用于不同类型的纱筒抓取。在机构设计过程中,不仅对各组成部分及其运动原理进行分析,还通过ANSYS Workbench软件对不同直径和不同长度的夹爪进行了静力学仿真,得出夹爪的直径为18 mm、长度为58 mm时可满足设计要求。同时研制样机,并进行了不同规格圆柱筒和圆锥筒的抓取实验。实验结果表明:该换筒末端执行器能够稳定、快速抓取内径为20~65 mm、质量不大于6 kg的纱筒,可应用于圆型纬编针织生产线。
中图分类号:
| [1] | 屠佳佳, 孙磊, 毛慧敏, 等. 圆纬机纱架自动换筒技术[J]. 纺织学报, 2022, 43(7): 178-185. |
| TU Jiajia, SUN Lei, MAO Huimin, et al. Automatic bobbin changing technology for circular weft knitting machines[J]. Journal of Textile Research, 2022, 43(7): 178-185. | |
| [2] | 刘传群, 何勇, 彭达, 等. 转杯纺落纱机械手连杆机构设计[J]. 毛纺科技, 2018, 46(4): 46-50. |
| LIU Chuanqun, HE Yong, PENG Da, et al. Design of linkage mechanism of rotor spinning doffing mani-pulator[J]. Wool Textile Journal, 2018, 46(4): 46-50. | |
| [3] | 冯世亮, 何勇. 自动落纱系统机械手的运动分析与机构设计[J]. 制造业自动化, 2013, 35(8): 73-78. |
| FENG Shiliang, HE Yong. The motion analysis and the mechanical design of manipulators on automatic doffering system[J]. Manufacturing Automation, 2013, 35(8): 73-78. | |
| [4] | ZHANG Wenzeng, YANG Sicheng, LUO Chao, et al. Development of a continuous vertical-pulling automatic doffing robot for the ring spinning[C]//2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau:IEEE. 2019: 2726-2731. |
| [5] | YANG Sicheng, LIN Yue, ZHANG Wenzeng, et al. A novel continuous single-spindle doffing robot with a spatial cam and multiple grippers[C]//International conference on Intelligent Robotics and Applications. Tokyo:ICIRA.2016:87-98. |
| [6] | 顾颖佳. 智能纱架机械手系统研制[D]. 上海: 东华大学, 2013: 17-24. |
| GU Yingjia. The design of the system of the intelligent creel robot[D]. Shanghai: Donghua University, 2013: 17-24. | |
| [7] | 时若辰. 智能纱架自动中转站系统设计[D]. 上海: 东华大学, 2015: 15-28. |
| SHI Ruochen. The systematic design of automatic transferring station for intelligent creel[D]. Shanghai: Donghua University, 2015: 15-28. | |
| [8] | 吕琳烨. 半自动纱架关键技术及调度算法研究[D]. 上海: 东华大学, 2017:16-35. |
| LÜ Linye. Research on key technology and scheduling algorithm of semi-automatic yarn creel[D]. Shanghai: Donghua University, 2017:16-35. | |
| [9] | 张洪, 魏毅, 陈瑞, 等. 整经机筒子架自动换筒机器人系统研发[J]. 上海纺织科技, 2020, 48(6): 10-13, 16. |
| ZHANG Hong, WEI Yi, CHEN Rui, et al. Research and development of automatic barrel changing robot system for warping machine's barrel frame[J]. Shanghai Textile Science & Technology, 2020, 48(6): 10-13, 6. | |
| [10] | 张洪, 魏毅, 李铬, 等. 基于机器人的整经机筒子架自动换筒系统研发[J]. 上海纺织科技, 2020, 48(4): 25-28. |
| ZHANG Hong, WEI Yi, LI Ge, et al. Research and development of automatic tube changing system of warping machine creel based on robot[J]. Shanghai Textile Science & Technology, 2020, 48(4): 25-28. | |
| [11] | 梁颖, 魏毅, 张洪, 等. 整经机筒子架自动换筒机器人机械机构设计[J]. 上海纺织科技, 2020, 48(3): 54-57. |
| LIANG Ying, WEI Yi, ZHANG Hong, et al. Mechanical mechanism design of automatic barrel-changing robot for warping machine barrel frame[J]. Shanghai Textile Science & Technology, 2020, 48(3): 54-57. | |
| [12] | 魏毅. 整经机筒子架筒子自动换运系统研发[D]. 郑州: 中原工学院, 2020: 24-33. |
| WEI Yi. Research on the problems related to the development of the warping machine warp beam installing and uninstalling robot[D]. Zhengzhou: Zhongyuan University of Technology, 2020: 24-33. | |
| [13] | 王静国, 管声启, 张凡, 等. 绳驱动纱筒抓取仿生机械手设计[J]. 软件, 2020, 41(4): 1-5. |
| WANG Jingguo, GUAN Shengqi, ZHANG Fan, et al. Design of bionic manipulator for rope-driven yarn drum grasping[J]. Computer Engineering & Software, 2020, 41(4): 1-5. | |
| [14] | 张凡, 管声启. 多尺寸纱筒柔性落纱机械手设计及其优化[J]. 毛纺科技, 2021, 49(1): 71-76. |
| ZHANG Fan, GUAN Shengqi. Design and optimization of flexible doffing manipulator for multi size bobbin[J]. Wool Textile Journal, 2021, 49(1): 71-76. | |
| [15] | 朱海峰, 饶丽娟. 基于CATIA软件的抓取纱筒机械手设计[J]. 上海纺织科技, 2020, 48(6): 14-16. |
| ZHU Haifeng, RAO Lijuan. Design of the manipulator for gripping the bobbin based on CATIA software[J]. Shanghai Textile Science & Technology, 2020, 48(6): 14-16. | |
| [16] | 魏哲, 焦航. 纱筒搬运机器人的设计[J]. 机械与电子, 2020, 38(8): 76-80. |
| WEI Zhe, JIAO Hang. Design of a bobbin yarn handling robot[J]. Machinery & Electronics, 2020, 38(8): 76-80. | |
| [17] | 焦航, 金守峰. 面向上纱机器人的末端执行器的结构设计[J]. 轻工机械, 2020, 38(5): 84-88, 93. |
| JIAO Hang, JIN Shoufeng. Structural design of end effector of yarn loading robot[J]. Light Industry Machinery, 2020, 38(5): 84-88, 93. | |
| [18] | 金守峰, 林强强, 马秋瑞. 基于对抗神经网络和神经网络模型的筒子纱抓取方法[J]. 毛纺科技, 2020, 48(1): 79-84. |
| JIN Shoufeng, LIN Qiangqiang, MA Qiurui. Method for grasping bobbin yarn based on generative adversarial network and neural network model[J]. Wool Textile Journal, 2020, 48(1): 79-84. | |
| [19] | SHI Zhiwei, SHI Weimin, WANG Junru. The detection of thread roll's margin based on computer vision[J]. Sensors, 2021, 21(19): 6331. |
| [20] | 韩思捷. 基于机器视觉的纱架自动换筒定位系统研究[D]. 杭州: 浙江理工大学,2023: 14-28. |
| HAN Sijie. Research on automatic cylinder changing positioning system of creel based on machine vision[D]. Hangzhou: Zhejiang Sci-Tech University, 2023: 14-28. |
| [1] | 史伟民, 李洲, 陆伟健, 屠佳佳, 徐寅哲. 基于改进Yolov5模型的纱筒余纱量检测方法[J]. 纺织学报, 2024, 45(07): 196-203. |
| [2] | 王俊茹, 王宏鹏, 汝欣, 陈智锋, 史伟民. 基于逆投影变换的纱筒纱线余量检测算法[J]. 纺织学报, 2024, 45(03): 185-193. |
| [3] | 陆伟健, 屠佳佳, 王俊茹, 韩思捷, 史伟民. 基于改进残差网络的空纱筒识别模型[J]. 纺织学报, 2024, 45(01): 194-202. |
| [4] | 孙磊, 屠佳佳, 毛慧敏, 王俊茹, 史伟民. 针织智能车间自动换筒任务调度技术[J]. 纺织学报, 2023, 44(12): 189-196. |
| [5] | 史伟民, 韩思捷, 屠佳佳, 陆伟健, 段玉堂. 基于机器视觉的空纱筒口定位方法[J]. 纺织学报, 2023, 44(11): 105-112. |
| [6] | 屠佳佳, 孙磊, 毛慧敏, 戴宁, 朱婉珍, 史伟民. 圆纬机纱架自动换筒技术[J]. 纺织学报, 2022, 43(07): 178-185. |
| [7] | 张东 孟婥. 纱筒残余氨的扩散过程建模与数值模拟[J]. 纺织学报, 2017, 38(09): 149-154. |
| [8] | 余伟. 铅布织机布边控制装置的设计[J]. 纺织学报, 2004, 25(05): 111-112. |
| [9] | 竺志超. 基于遗传算法的卷绕成形机构设计[J]. 纺织学报, 2001, 22(04): 9-11. |
| [10] | 梅顺齐;向新柱;赵延雯;赵健;吕亚魁;曹彬余. 新型捻线锭子中磁力耦合传动设计的探讨[J]. 纺织学报, 1999, 20(04): 21-24. |
| [11] | 李济群. 国产匀整装置记忆精度的改进[J]. 纺织学报, 1999, 20(01): 32-33. |
|
||
 京公网安备11010502044800号
京公网安备11010502044800号