纺织学报 ›› 2024, Vol. 45 ›› Issue (06): 227-234.doi: 10.13475/j.fzxb.20230506802
王建萍1,2,3,4, 沈津竹1,2,3, 姚晓凤1,2,3( ), 朱妍西1,2,3, 张帆5
), 朱妍西1,2,3, 张帆5
WANG Jianping1,2,3,4, SHEN Jinzhu1,2,3, YAO Xiaofeng1,2,3(), ZHU Yanxi1,2,3, ZHANG Fan5
摘要:
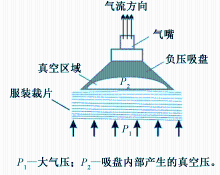
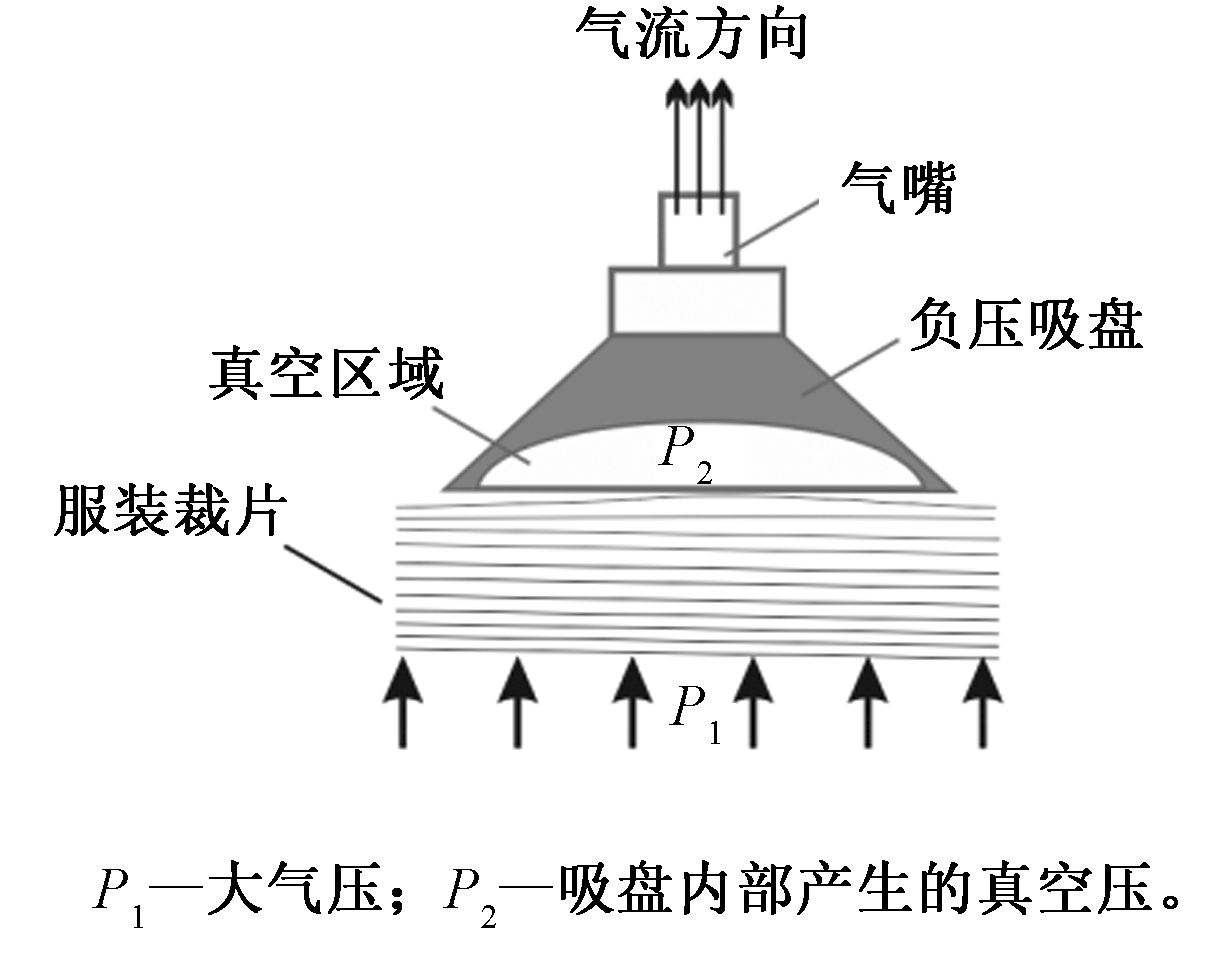
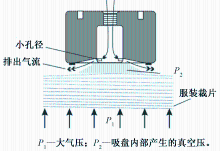
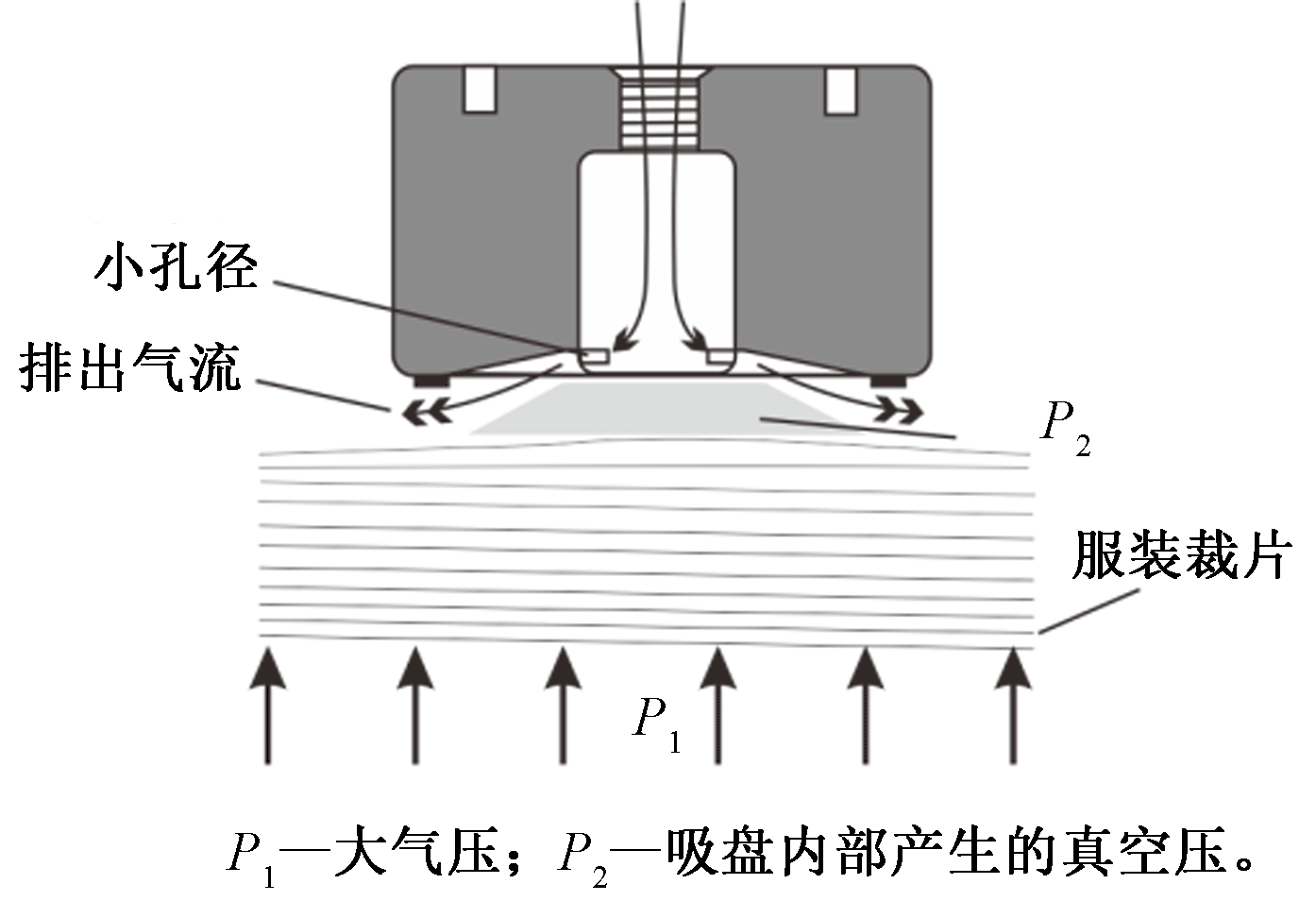
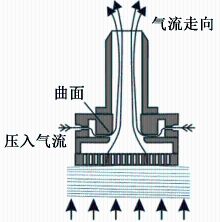
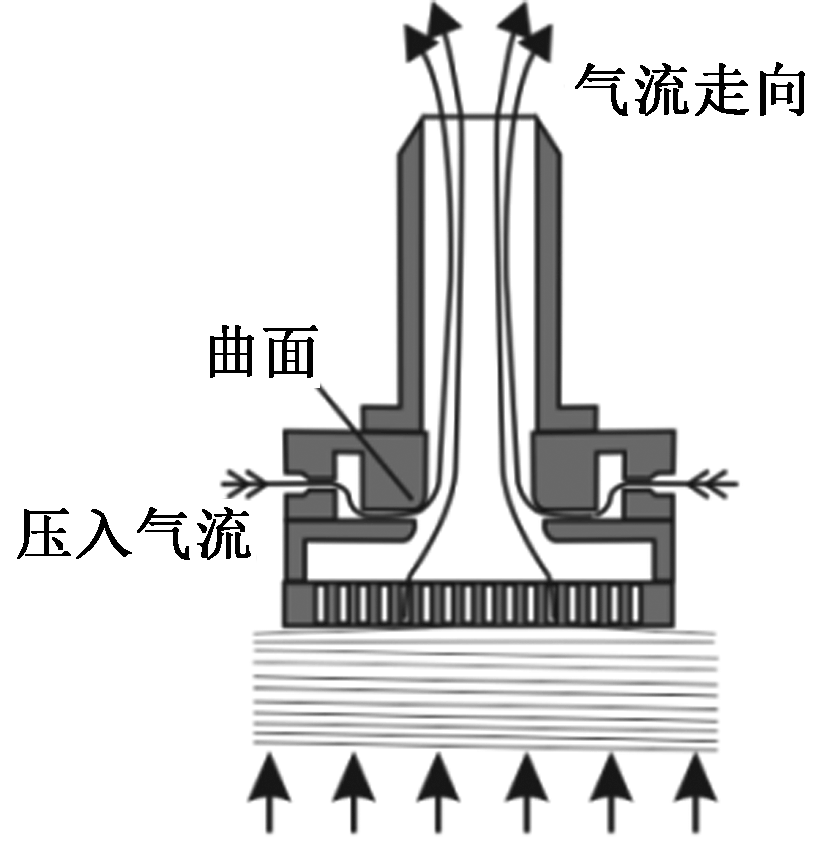
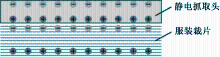
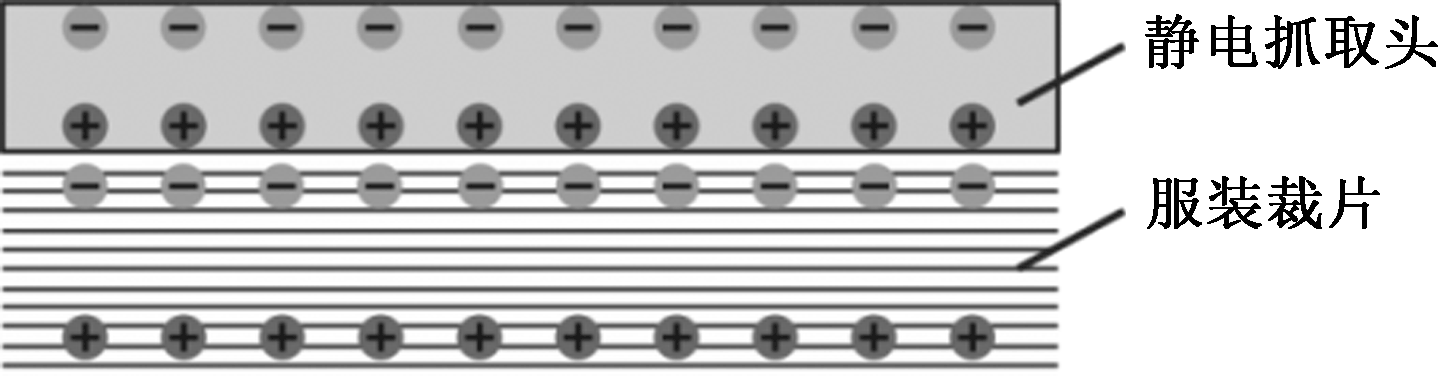
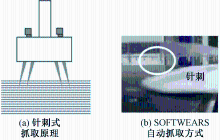
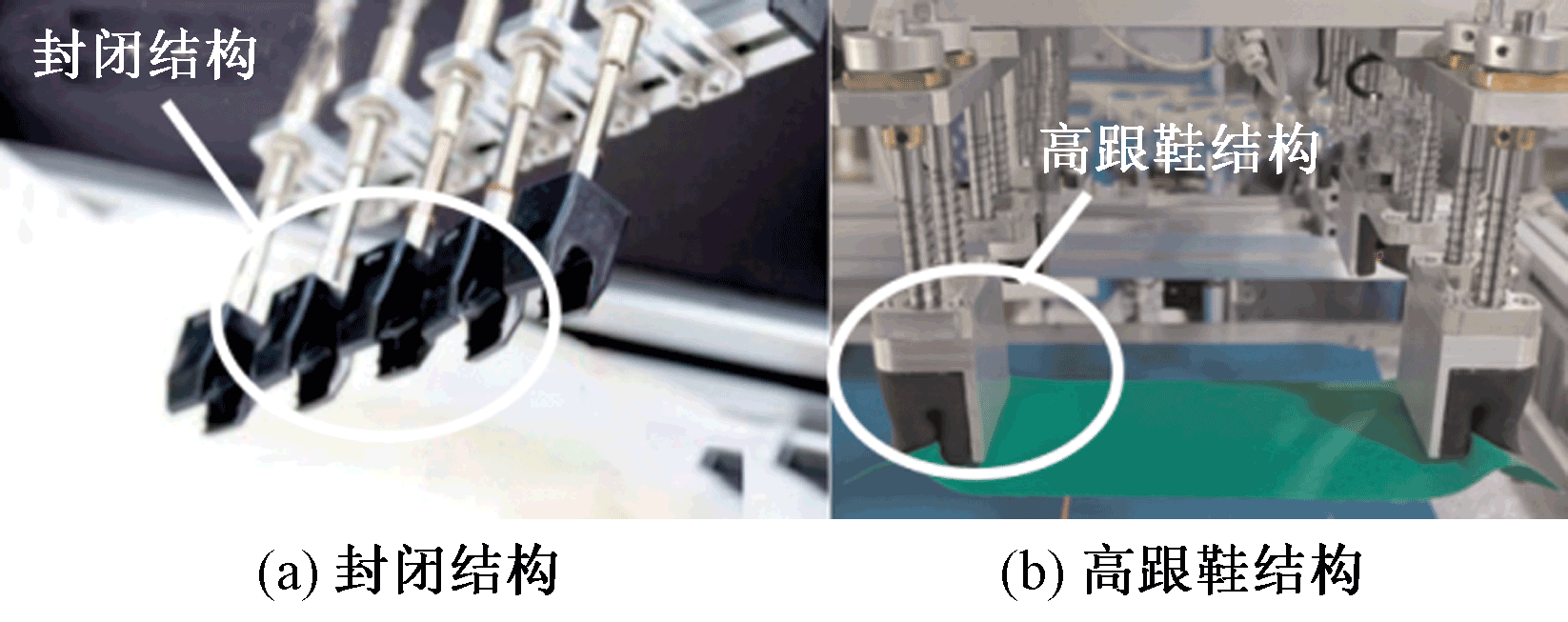
为促进服装裁片自动化运输的发展,推动服装加工端完成产业升级,即“机器代人”,实现服装智能制造,综述了目前国内外服装裁片智能抓取技术及其布局方法的研究现状。具体分析了空压吸附式抓取,静电式抓取,针刺式抓取,机械手抓取和软体手指抓取的原理和特点,阐述了各抓取方式所适用的面料范围,将其在面料表面的布局方式总结为3类:盲式布局抓取、单点布局抓取和多点协同抓取。研究认为软体手指抓取技术具有更广阔的应用前景,并展望了服装裁片智能抓取技术的未来发展趋势,指出提高抓取准确率,提高抓取头的重复定位精度,研发便捷、高效、经济的布局方式,以及研发结合机器视觉技术等人工智能技术的智能抓取方式为未来的重要研究方向。
中图分类号:
| [1] | 闻力生. 服装智能制造需用好数据资产[J]. 纺织科学研究, 2022(3): 32-34. |
| WEN Lisheng. Intelligent manufacturing of clothing requires well use of data assets[J]. Textile Science Research, 2022(3): 32-34. | |
| [2] | 闻力生. 人工智能在服装智能制造中的应用[J]. 纺织高校基础科学学报, 2020, 33(2): 30-36. |
| WEN Lisheng. Application of artificial intelligence in garment intelligent manufacturing[J]. Basic Sciences Journal of Textile Universities, 2020, 33(2): 30-36. | |
| [3] | 闻力生. 服装企业智能制造的实践[J]. 纺织高校基础科学学报, 2017, 30(4): 468-474. |
| WEN Lisheng. Practice of intelligence manufacturing in apparel enterprises[J]. Basic Sciences Journal of Textile Universities, 2017, 30(4): 468-474. | |
| [4] | 刘汉邦, 李新荣, 刘立东. 服装面料自动抓取转移方法的研究进展[J]. 纺织学报, 2021, 42(1): 190-196. |
| LIU Hanbang, LI Xinrong, LIU Lidong. Research progress if automatic grabbing and transfer methods for garment fabrics[J]. Journal of Textile Research, 2021, 42(1): 190-196. | |
| [5] | LIU Y, SU J, LI X, et al. A systematic automated grasping approach for automatic manipulation of fabric with soft robot grippers[J]. Industrial Robot-the International Journal of Robotics Research and Application, 2023, 50(4):623-632. |
| [6] | 沈津竹. 基于软体手指的服装裁片堆垛抓取模型研究[D]. 无锡: 江南大学, 2021:1-57. |
| SHEN Jinzhu. Grasping model of garment cutting pieces for robotic soft fingers[D]. Wuxi: Jiangnan University, 2021:1-57. | |
| [7] | SU J Q, SHEN J Z, LYU J. Arrangement of soft fingers for automatic grasping of fabric pieces of garment[J]. Textile Research Journal, 2022, 92(1/2): 143-159. |
| [8] | FAILLI F, DINI G. An innovative approach to the automated stacking and grasping of leather plies[J]. Cirp Annals-Manufacturing Technology, 2004, 53(1): 31-34. |
| [9] | ČUBRIC G, SALOPEK ČUBRIC I. Study of grippers in automatic handling of nonwoven material[J]. Journal of The Institution of Engineers (India): Series E, 2019, 100:167-173. |
| [10] | CUBRIC G. Catching the woven fabric with vacuum gripper[C]//NIKOLIC G, SIGNJAR S. 23rd International DAAAM Symposium on Intelligent Manufacturing and Automation - Focus on Sustainability. New York: Curran Associates, Inc, 2012: 465-468. |
| [11] | OZCELIK B, ERZINCANLI F. A non-contact end-effector for the handling of garments[J]. Robotica, 2002, 20: 447-450. |
| [12] | DINI G, FANTONI G, FAILLI F. Grasping leather plies by Bernoulli grippers[J]. CIRP Annals, 2009, 58(1): 21-24. |
| [13] | LIEN T K, DAVIS P G G. A novel gripper for limp materials based on lateral Coanda ejectors[J]. Cirp Annals-Manufacturing Technology, 2008, 57(1): 33-36. |
| [14] | LIU H B, LI X R, FENG W Q, et al. Grabbing performance of non-contact gripper based on Coanda effect for garment fabrics[J]. Journal of Textile Research, 2022, 43(2): 208-213. |
| [15] | 刘汉邦, 李新荣, 冯文倩, 等. 面向服装面料的柯恩达效应式非接触夹持器吸附性能[J]. 纺织学报, 2022, 43(2): 208-213. |
| LIU Hanbang, LI Xinrong, FENG Wenqing, et al. Grabbing performance of non-contact gripper based on Coanda effect for garment fabrics[J]. Journal of Textile Research, 2022, 43(2): 208-213. | |
| [16] | 刘立东, 李新荣, 刘汉邦, 等. 基于纬编针织物特性的静电吸附力模型[J]. 纺织学报, 2021, 42(3): 161-168. |
| LIU Lidong, LI Xinrong, LIU Hanbang, et al. Electrostatic adsorption model based on characteristics of weft knitted fabrics[J]. Journal of Textile Research, 2021, 42(3): 161-168. | |
| [17] | 刘立东, 李新荣, 刘汉邦, 等. 服装面料静电吸附抓取转移电极板优化设计[J]. 纺织学报, 2021, 42(2): 185-192. |
| LIU Lidong, LI Xinrong, LIU Hanbang, et al. Optimization design of electrode plate based on electrostatic adsorption and transfer used for garment fabric[J]. Journal of Textile Research, 2021, 42(2): 185-192. | |
| [18] | SUN B. A new electrostatic gripper for flexible handling of fabrics in automated garment manufacturing[C]//ZHANG X Y. 15th IEEE International Conference on Automation Science and Engineering (IEEE CASE). Piscataway: IEEE, 2019: 879-884. |
| [19] | FENG W Q, HU Y L, LI X R, et al. Robot end effector based on electrostatic adsorption for manipulating garment fabrics[J]. Textile Research Journal, 2022, 92(5/6): 691-705. |
| [20] | KONDRATAS A. Robotic gripping device for garment handling operations and its adaptive control[J]. Fibres & Textiles in Eastern Europe, 2005, 13(4): 84-89. |
| [21] | SOFTWEAR AUTOMATION[EB/OL].(2021-01-01)[2024-02-16]. https://softwearautomation.com/sewbots/. |
| [22] | ABE T, KAWASAKI Y, YAMAZAKI K. A robotic end-effector with rolling up mechanism for pick-and-release of a cotton sheet[J]. Robomech Journal, 2020, 7(1): 37. |
| [23] | EBRAHEEM Y, DREAN E, Adolphe D C. Universal gripper for fabrics-design, validation and inte-gration[J]. International Journal of Clothing Science and Technology, 2021, 33(4): 643-663. |
| [24] | YAMAZAKI K, ABE T. A versatile end-effector for pick-and-release of fabric parts[J]. Ieee Robotics and Automation Letters, 2021, 6(2): 1431-1438. |
| [25] | BORRAS J, ALENYA G, TORRAS C. A grasping-centered analysis for cloth manipulation[J]. Ieee Transactions on Robotics, 2020, 36(3): 924-936. |
| [26] | ONO E. On better pushing for picking a piece of fabric from layers[C]//TAKASE K, IEEE International Conference on Robotics and Biomimetics (ROBIO). Piscataway: IEEE, 2007: 589-59. |
| [27] | ONO E. On friction picking up a piece of fabric from layers[C]//KITAGAKI K, KAKIKURA M. IEEE International Conference on Mechatronics Automation. Piscataway: IEEE, 2005: 2206-2211. |
| [28] | KOUSTOUMPARDIS P N. A 3-finger robotic gripper for grasping fabrics based on cams-followers mechanism[C]//SMYRNIS S, ASPRAGATHOS N A. 26th International Conference on Robotics in Alpe-Adria-Danube Region (RAAD). Cham: Springer Nature, 2017: 612-620. |
| [29] | KOUSTOUMPARDIS P N. Underactuated 3-finger robotic gripper for grasping fabrics[C]//NASTOS K X, ASPRAGATHOS N A. 23rd International Conference on Robotics in Alpe-Adria-Danube Region (RAAD). Piscataway: IEEE, 2014:1-8. |
| [30] | JILICH M, FRASCIO M, AVALLE M, et al. Development of a gripper for garment handling designed for additive manufacturing[J]. Proceedings of the Institution of Mechanical Engineers Part C: Journal of Mechanical Engineering Science, 2021, 235(10): 1799-1810. |
| [31] | LE L A. Application of a biphasic actuator in the design of a robot gripper for garment handling[C]// LE L A, ZOPPIM, JILICHM, et al.ASME Design Engineering Technical Conferences and Computers and Information in Engineering Conference (DETC). New York: American Society of Mechanical Engineers, 2014: 1-10 |
| [32] | LE L. Development and analysis of a new specialized gripper mechanism for garment handling[C]// LE L, ZOPPIM, JILICHM, et al.ASME International Design Engineering Technical Conferences and Computers and Information in Engineering Conference (IDETC/CIE). New York: American Society of Mechanical Engineers. 2013.DOI:10.115/DETC2013-13150. |
| [33] | KOUSTOUMPARDIS P. A review of gripping devices for fabric handling[C]//ASPRAGATHOS N. International Conference on Intelligent Manipulation and Grasping IMG04. Delhi: Emerald Group Publishing Limited. 2004: 229-234. |
| [34] | 张蕾, 韦攀东, 李鹏飞, 等. 采用神经网络算法的多指机械手织物抓取规划[J]. 纺织学报, 2017, 38(1): 132-139. |
| ZHANG Lei, WEI Pandong, LI Pengfei, et al. Fabric grasp planning for muti-fingered dexterous hand based on neural network algorithm[J]. Journal of Textile Research, 2017, 38(1): 132-139. | |
| [35] | RANZANI T, GERBONI G, CIANCHETTI M, et al. A bioinspired soft manipulator for minimally invasive surgery[J]. Bioinspir Biomim, 2015. DOI:10.1088/1748-3190/10/3/035008. |
| [36] | 沈津竹, 赵晓露, 张帆, 等. 柔性康复手套设计与工效性评价[J]. 纺织学报, 2020, 41(9): 119-127. |
| SHEN Jinzhu, ZHAO Xiaolu, ZHANG Fan, et al. Design and ergonomic evaluation of flexible rehabilitation gloves[J]. Journal of Textile Research, 2020, 41(9): 119-127. | |
| [37] | 沈津竹, 苏军强. 软体机械手逐层分离服装裁片的影响因素[J]. 服装学报, 2021, 6(4): 357-365. |
| SHEN Jinzhu, SU Junqiang. Influence factors of the soft manipulator to separate the garment cutting pieces layer by layer[J]. Journal of Clothing Research, 2021, 6(4): 357-365. | |
| [38] | POLYGERINOS P, WANG Z, GALLOWAY K C, et al. Soft robotic glove for combined assistance and at-home rehabilitation[J]. Robotics and Autonomous Systems, 2015, 73: 135-143. |
| [39] |
王延杰, 赵鑫, 王建峰, 等. 软体机器人驱动技术研究进展[J]. 液压与气动, 2022, 46(12): 1-11.
doi: 10.11832/j.issn.1000-4858.2022.12.001 |
| WANG Yanjie, ZHAO Xin, WANG Jianfeng, et al. Research progress on actuating technology of soft robot[J]. Chinese Hydraulics & Pneumatics, 2022, 46(12): 1-11. | |
| [40] | 董效, 冯显英. 软体机器人研究现状及展望[J]. 现代制造技术与装备, 2022, 58(9): 70-73. |
| DONG Xiao, FENG Xianying. Research status and prospect of soft robot[J]. Modern Manufacturing Technology and Equipment, 2022, 58(9): 70-73. | |
| [41] | KU S, MYEONG J, KIM H Y, et al. Delicate fabric handling using a soft robotic gripper with embedded microneedles[J]. IEEE Robotics and Automation Letters, 2020, 5(3): 4852-4858. |
| [42] | SU J Q, SHEN J Z, ZHANG F. Grasping model of fabric cut pieces for robotic soft fingers[J]. Textile Research Journal, 2022, 92(13/14): 2223-2238. |
| [43] | SU J, WANG N, ZHANG F. A design of bionic soft gripper for automatic fabric grasping in apparel manufacturing[J]. Textile Research Journal, 2023, 93(7/8): 1587-1601. |
| [44] | RAGUNATHAN S, KARUNAMOORTHY L. Modeling and dynamic analysis of reconfigurable robotic gripper system for handling fabric materials in garment industries[J]. Journal of Advanced Manufacturing Systems, 2006, 5: 233-254. |
| [45] | LANKALAPALLI S, EISCHEN J W. Optimal pick-up locations for transport and handling of limp materials: part I: one-dimensional strips[J]. Textile Research Journal, 2003, 73(9): 787-796. |
| [46] | LIN H, CLIFFORD M J, TAYLOR P M, et al. 3D mathematical modelling for robotic pick up of textile composites[J]. Composites Part B: Engineering, 2009, 40(8): 705-713. |
| [47] | LIN H, TAYLOR P M, BULL S J. Modelling of contact deformation for a pinch gripper in automated material handling[J]. Mathematical and Computer Modelling, 2007, 46(11/12): 1453-1467. |
| [48] | 《中国制造2025》解读之:我国制造业发展进入新的阶段[J]. 工业炉, 2023, 45(2): 60. |
| Interpretation of Made in China 2025: China's manufacturing industry has entered a new stage[J]. Industrial Furnace, 2023, 45(2): 60. |
| [1] | 王建萍, 朱妍西, 沈津竹, 张帆, 姚晓凤, 于卓灵. 软体机器人在服装领域的应用进展[J]. 纺织学报, 2024, 45(05): 239-247. |
| [2] | 黄晨静, 张蕾, 孙逊, 王晓华. 基于动力学模型的面料抓取机械臂轨迹跟踪控制方法[J]. 纺织学报, 2023, 44(06): 207-214. |
| [3] | 杜劲松, 余雅芸, 赵妮, 谢子昂, 费中华, 潘静姝. 不同类型服装企业智能制造能力成熟度评价模型[J]. 纺织学报, 2021, 42(05): 162-167. |
| [4] | 刘立东, 李新荣, 刘汉邦, 李丹丹. 基于纬编针织物特性的静电吸附力模型[J]. 纺织学报, 2021, 42(03): 161-168. |
| [5] | 刘立东, 李新荣, 刘汉邦, 李丹丹. 服装面料静电吸附抓取转移电极板优化设计[J]. 纺织学报, 2021, 42(02): 185-192. |
| [6] | 刘汉邦, 李新荣, 刘立东. 服装面料自动抓取转移方法的研究进展[J]. 纺织学报, 2021, 42(01): 190-196. |
|
||
 京公网安备11010502044800号
京公网安备11010502044800号