纺织学报 ›› 2024, Vol. 45 ›› Issue (07): 204-212.doi: 10.13475/j.fzxb.20230504501
李皎1,2, 辛世纪2,3, 陈利1,2, 陈小明1,2,3( )
)
LI Jiao1,2, XIN Shiji2,3, CHEN Li1,2, CHEN Xiaoming1,2,3()
摘要:
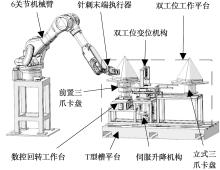
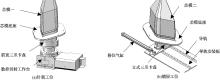
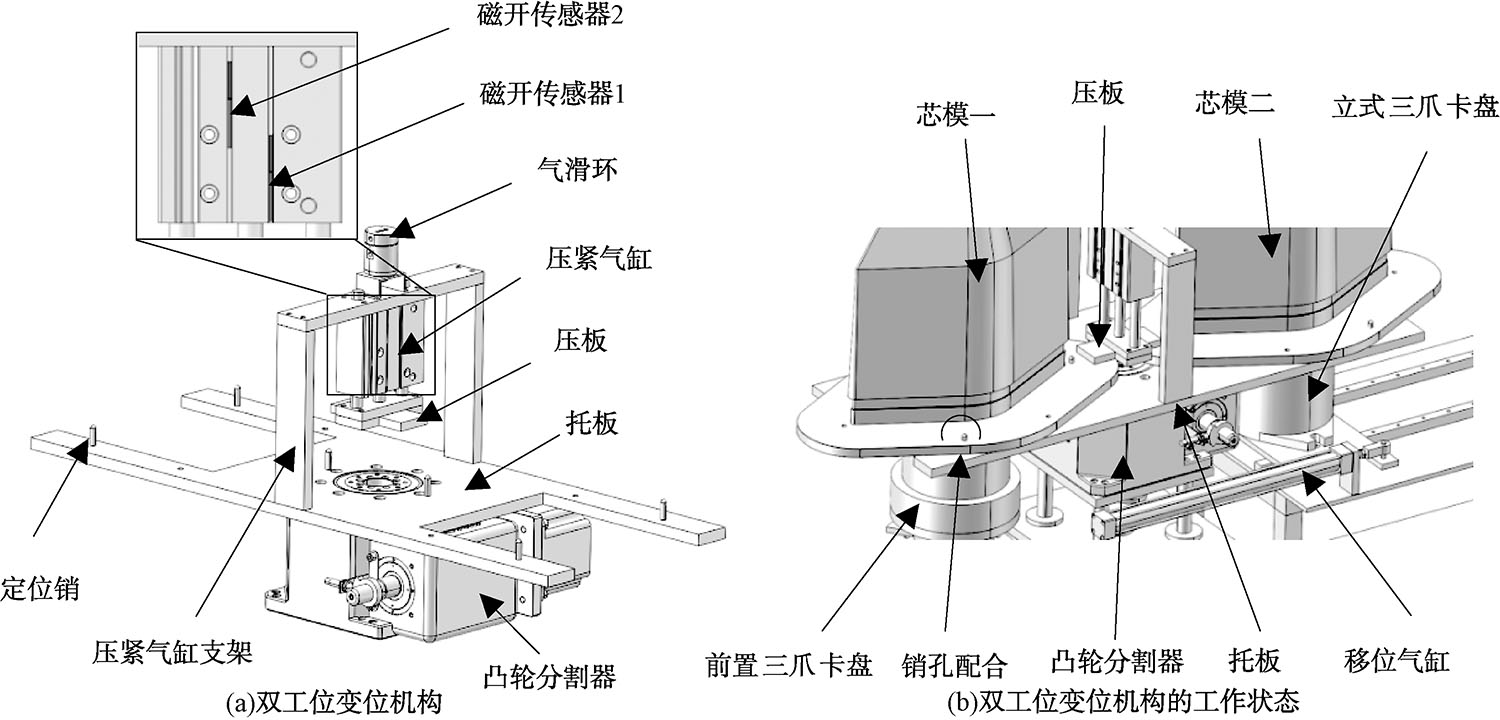
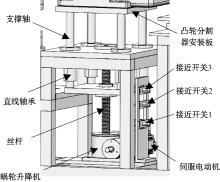
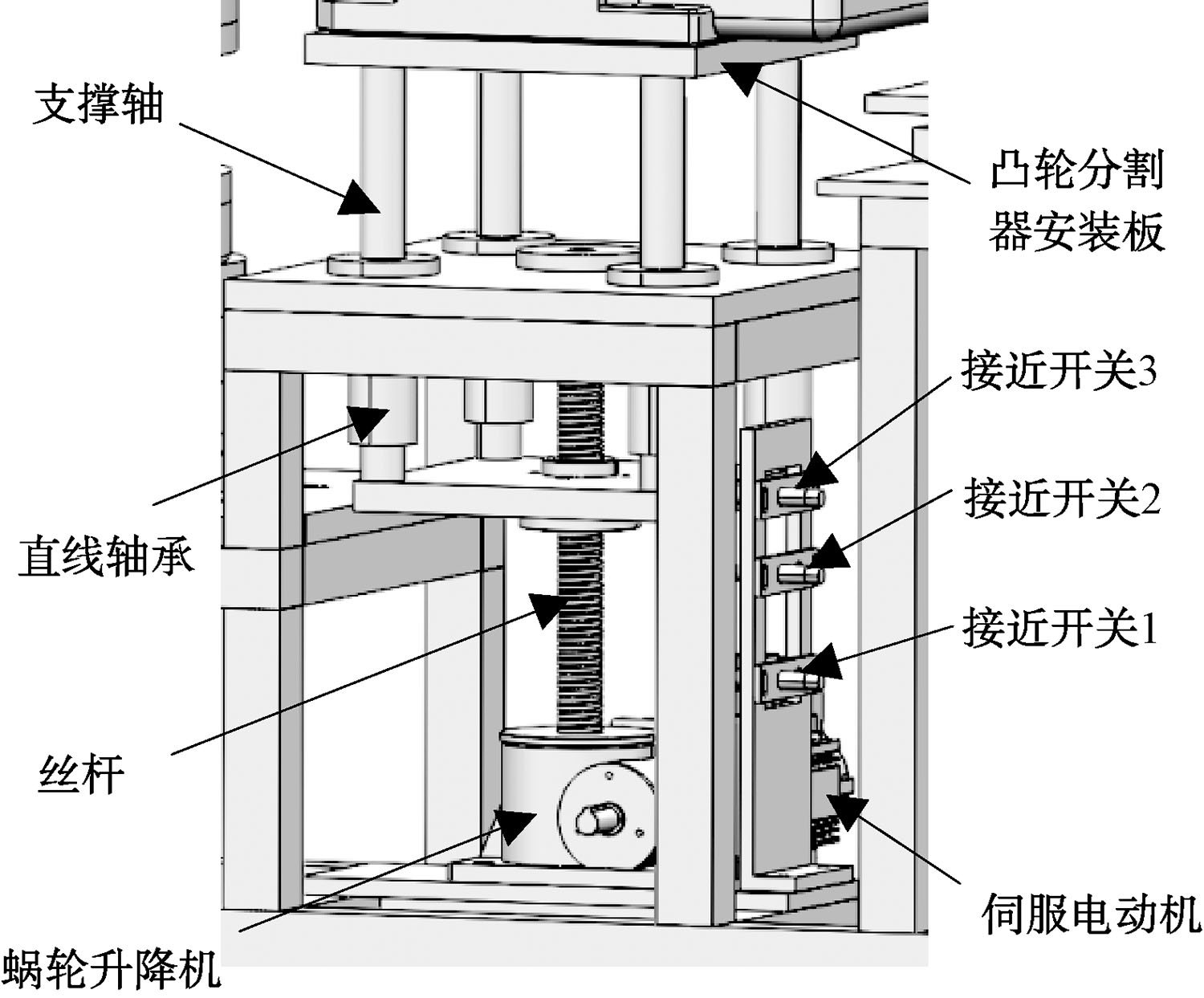
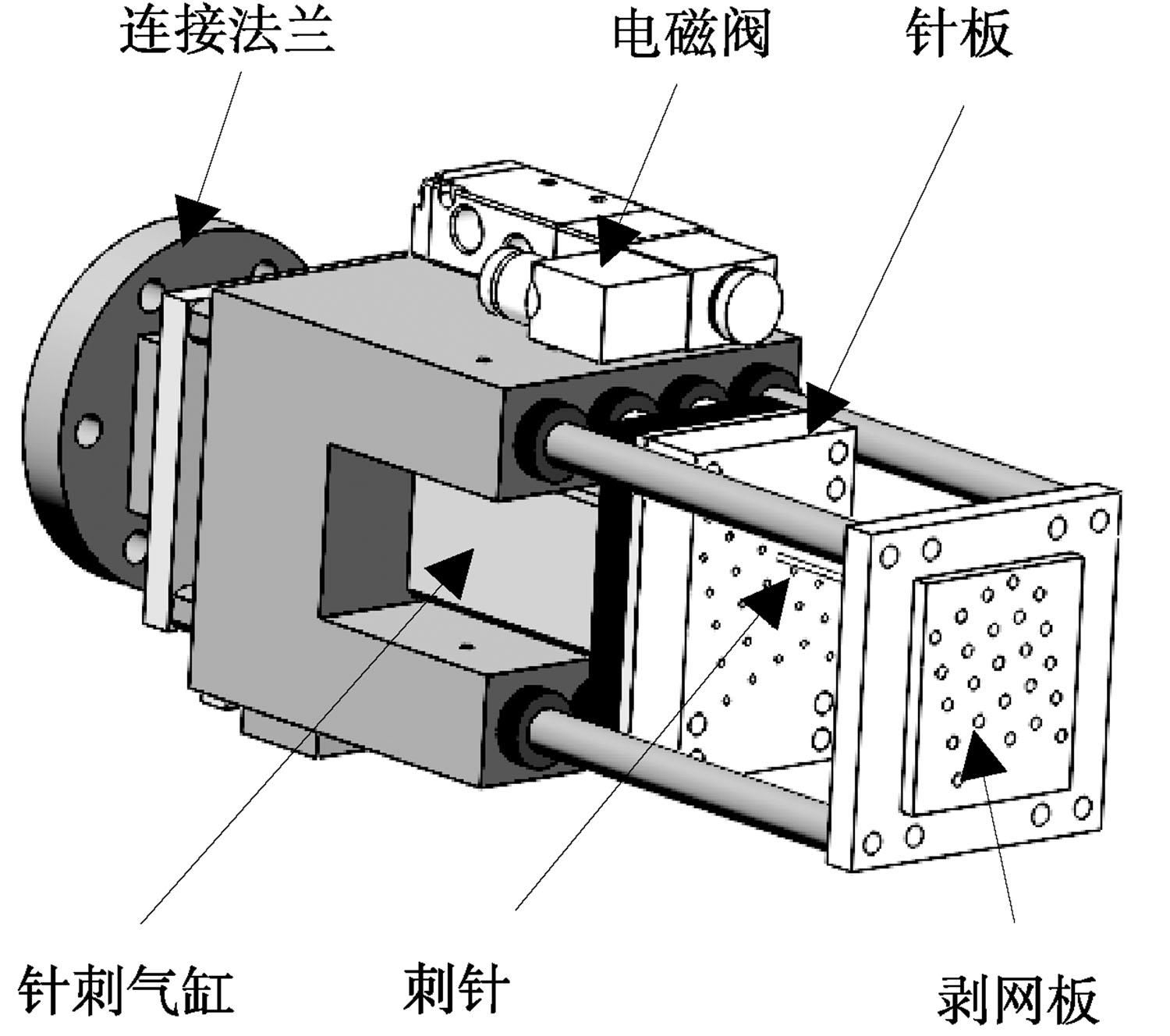
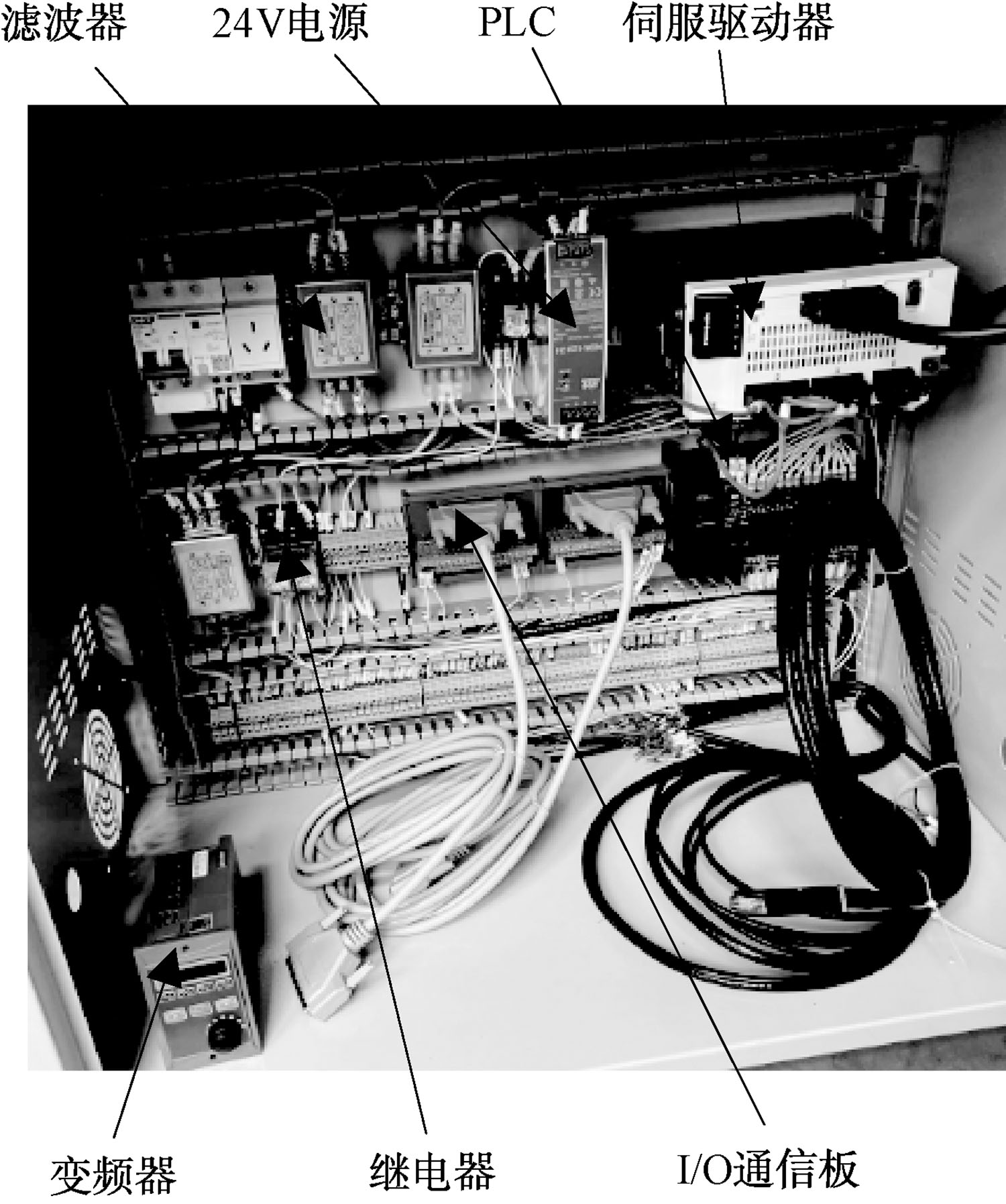
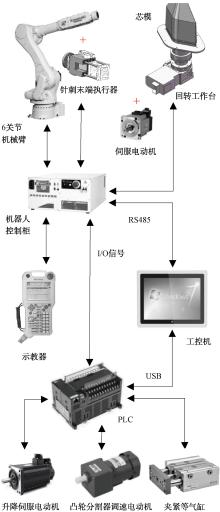
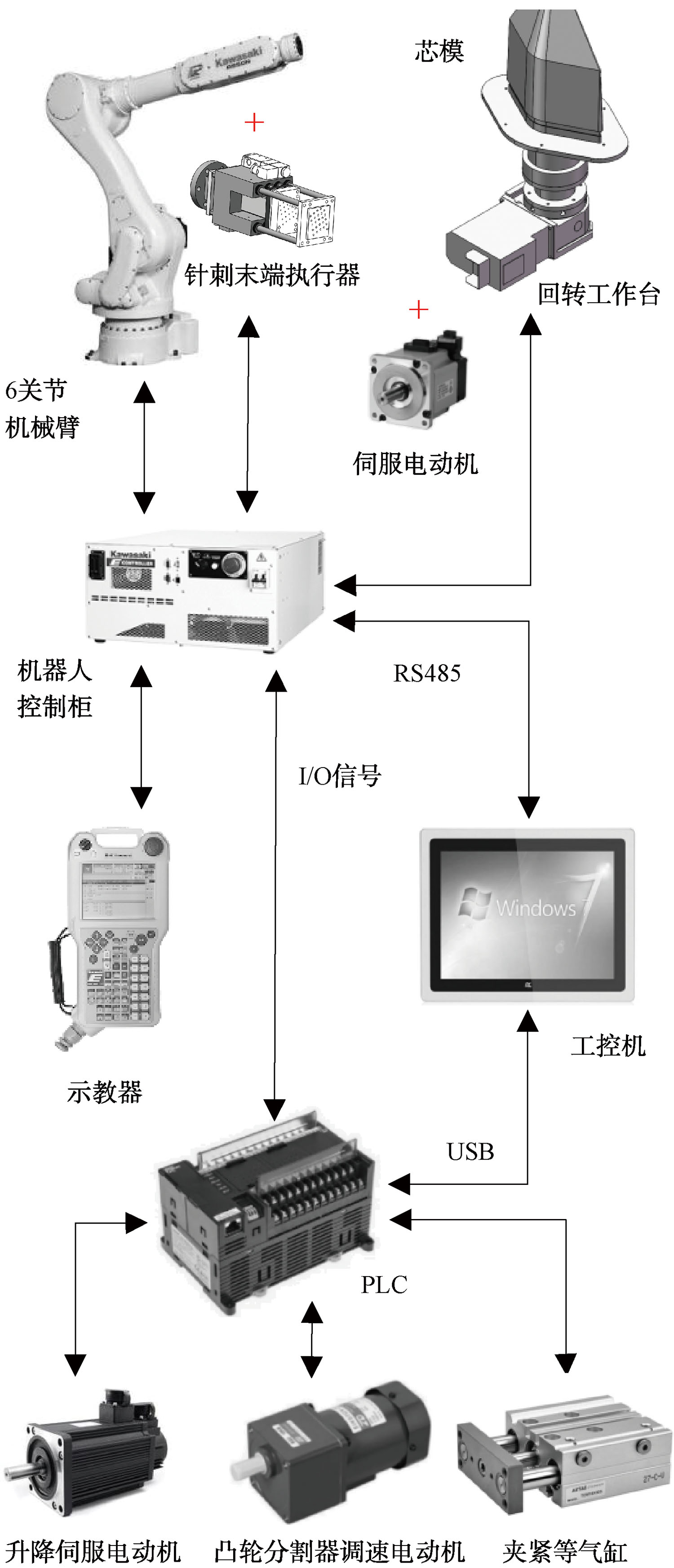
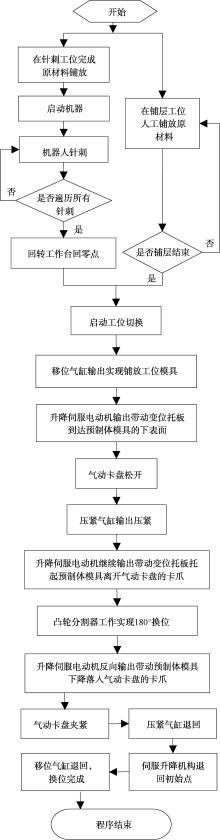
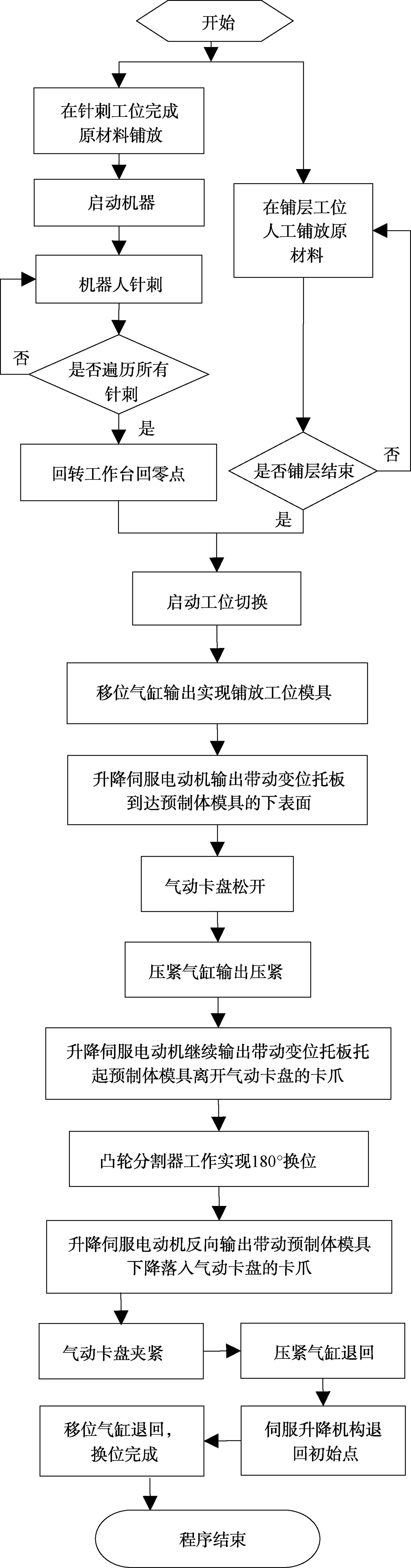
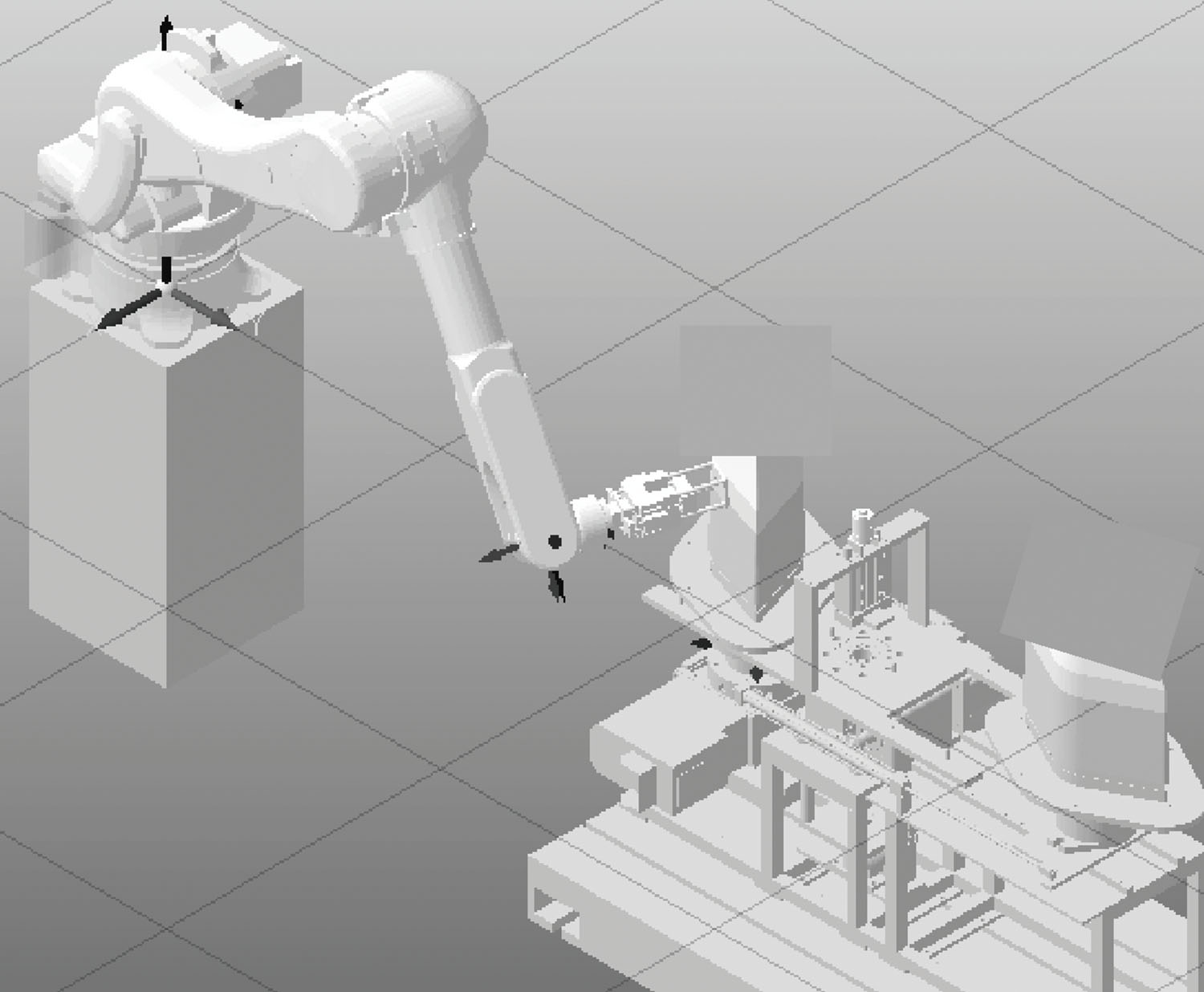
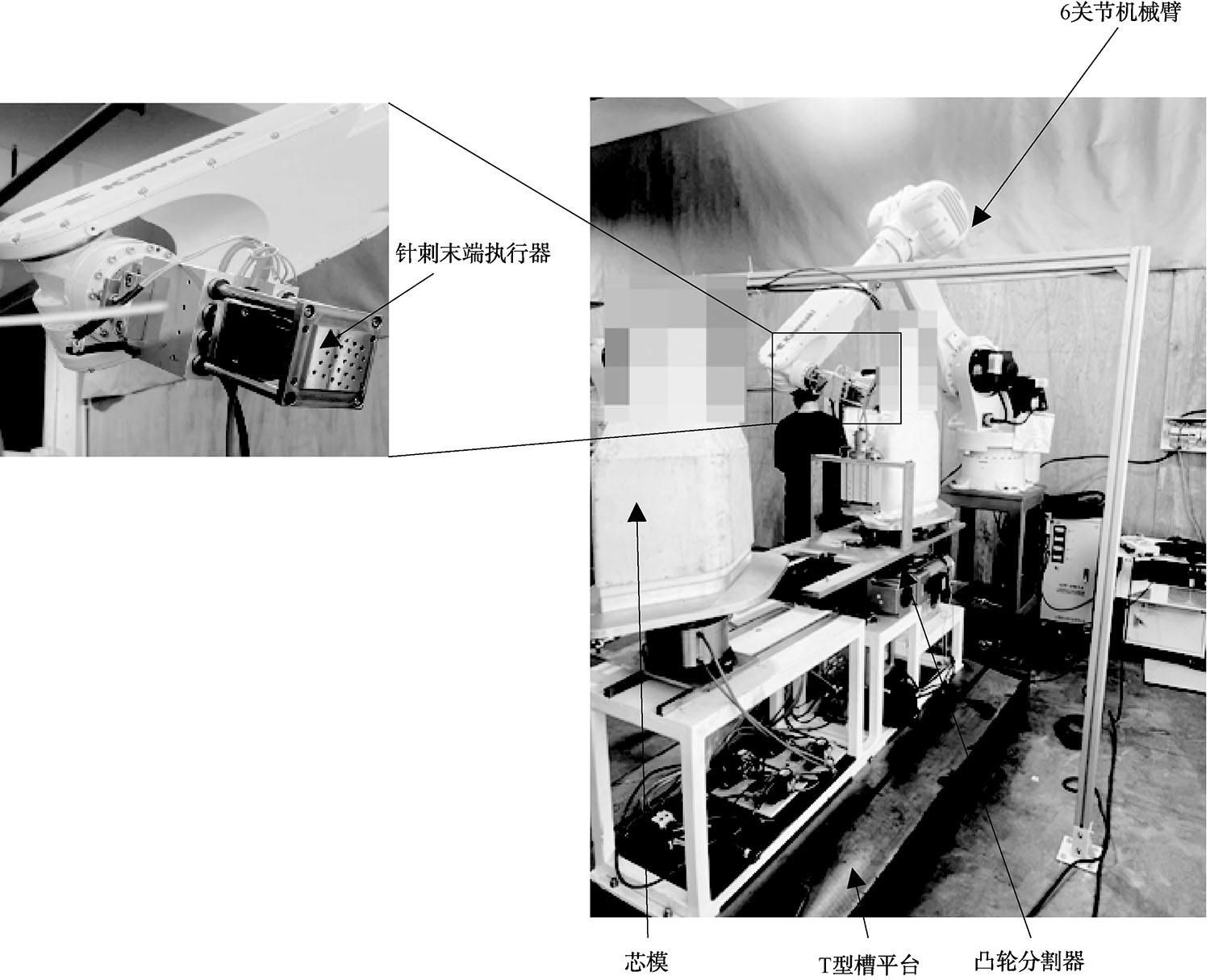
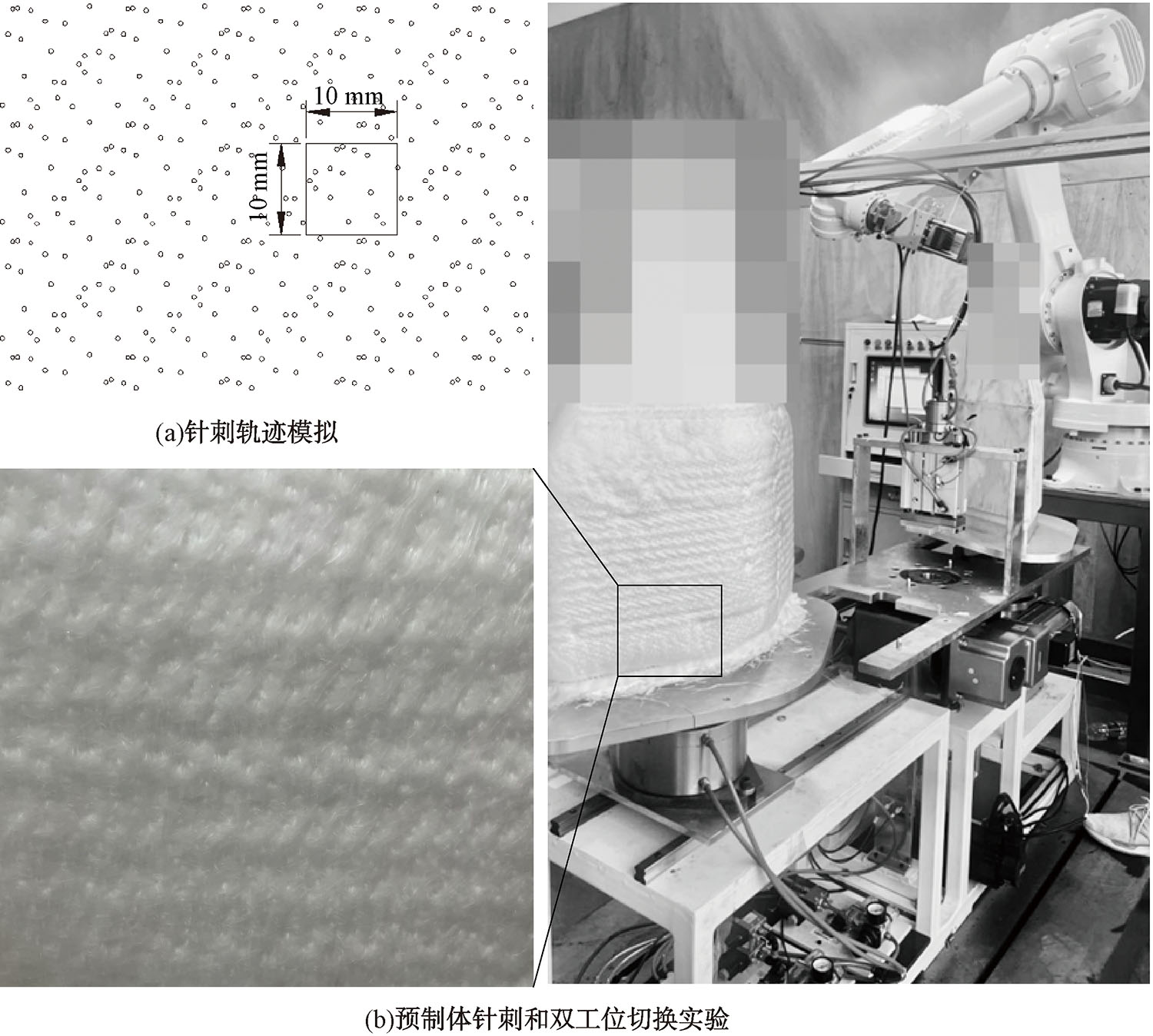
针对单工位针刺成型系统中人和机器无法高效协同生产,预制体生产效率较低;现有的直线型双工位针刺机器人设备需要2个外部回转轴带动双工位参与织物针刺,系统编程难度较高,且工位切换时需要占据的空间大的问题。提出一种混合切换双工位针刺机器人系统,并开展了双工位针刺成形系统的机械结构设计、异型预制体模具和针刺工艺设计、控制系统设计、运动仿真以及预制体制备的实验验证。结果表明:系统成功实现了大尺寸异型曲面预制体的高效针刺成形,直线/旋转混合切换的双工位使得实现预制体的自动换装的同时又能保证系统空间占用量小;双工位中只有针刺工位上的外部回转轴与6关节机械臂联动,系统较为简单,编程方便;同时提高了数控回转工作台的承载力且将针刺末端执行器的布针数量增加至25针,满足了大尺寸预制体的针刺成形,并使得针刺成形效率直接提高2倍。本文系统可应用于批量化制备大尺寸异型曲面复材预制体。
中图分类号:
| [1] | CHEN X, CHEN L, ZHANG C, et al. Three-dimensional needle-punching for composites: a review[J]. Composites Part A: Applied Science and Manufacturing, 2016, 85: 12-30. |
| [2] | YAO T, CHEN X, LI J, et al. Significantly improve the interlayer and in-plane properties of needled fabrics by novel none-felt needling technology[J]. Composite Structures, 2021, 274(1):1-9. |
| [3] | JI A, CUI H, LI H, et al. Performance analysis of a carbon cloth/felt layer needled preform[J]. New Carbon Materials, 2011, 26(2): 109-116. |
| [4] |
刘宇峰, 俸翔, 王金明, 等. 高性能针刺碳/碳复合材料的制备与性能[J]. 无机材料学报, 2020, 35(10):1105-1111.
doi: 10.15541/jim20190607 |
|
LIU Yufeng, FENG Xiang, WANG Jinming, et al. Preparation and properties of high-performance needled carbon/carbon composites[J]. Journal of Inorganic Materials, 2020, 35(10):1105-1111.
doi: 10.15541/jim20190607 |
|
| [5] | CHEN T, LIAO J, LIU G, et al. Effects of needle-punched felt structure on the mechanical properties of carbon/carbon composites[J]. Carbon, 2003, 41(5): 993-999. |
| [6] | OLRY P. Process and apparatus for manufacturing axi-symmetrical three-dimensional structures: 19840685056[P]. 1986-11-11. |
| [7] | HERVE E, LE H, GARETH C, et al. Installation and a method for needling a fiber preform while controlling the contact pressure of the stripper: US20180274144A1[P]. 2018-9-27. |
| [8] | CHEN X, ZHANG Y, XIE J, et al. Robot needle-punching path planning for complex surface preforms[J]. Robotics and Computer-Integrated Manufacturing, 2018. DOI:10.1016/j.rcim.2018.02.004. |
| [9] | CHEN X, ZHAO Y, ZHANG C, et al. Robot needle-punching for manufacturing composite preforms[J]. Robotics and Computer-Integrated Manufacturing, 2018. DOI:/10.1016/j.rcim.2017.09.008. |
| [10] | 蒋云, 王耀武, 陈美琴. 一种双工位机器人针刺设备: 202022675605.4[P].2021-10-22. |
| JIANG Yun, WANG Yaowu, CHEN Meiqin. A dual-station robot acupuncture equipment: 202022675605.4[P].2021-10-22. | |
| [11] | 李皎, 陈利, 姚天磊, 等. 类回转预制体针刺机器人系统设计[J]. 纺织学报, 2023, 44(7): 207-213. |
| LI Jiao, CHEN Li, YAO Tianlei, et al. Design of needling robot system for quasi-rotary preforms[J]. Journal of Textile Research, 2023, 44(7): 207-213. |
| [1] | 王辉, 周伟, 陈一哲, 龙晚昕, 王金伙. 三角形编织工艺数字化建模方法[J]. 纺织学报, 2024, 45(06): 75-81. |
| [2] | 王建萍, 朱妍西, 沈津竹, 张帆, 姚晓凤, 于卓灵. 软体机器人在服装领域的应用进展[J]. 纺织学报, 2024, 45(05): 239-247. |
| [3] | 李珣, 李哲文, 张婷文, 景军锋, 李鹏飞. 面向纺织生产环境的移动机器人定位方法[J]. 纺织学报, 2023, 44(12): 170-180. |
| [4] | 孙磊, 屠佳佳, 毛慧敏, 王俊茹, 史伟民. 针织智能车间自动换筒任务调度技术[J]. 纺织学报, 2023, 44(12): 189-196. |
| [5] | 戴宁, 梁汇江, 胡旭东, 戚栋明, 徐郁山, 屠佳佳, 史伟民. 插管式机器人空管状态检测方法[J]. 纺织学报, 2023, 44(11): 199-207. |
| [6] | 梅宝龙, 董九志, 任洪庆, 蒋秀明. 基于多维度建模的碳/碳软硬混编预制体孔隙分析与单胞模型[J]. 纺织学报, 2023, 44(09): 108-115. |
| [7] | 李皎, 陈利, 姚天磊, 陈小明. 类回转预制体针刺机器人系统设计[J]. 纺织学报, 2023, 44(07): 207-213. |
| [8] | 陈小明, 任志鹏, 郑宏伟, 吴凯杰, 苏星兆, 陈利. 基于预/主刺协同的针刺织物力学性能提升方法[J]. 纺织学报, 2023, 44(04): 100-107. |
| [9] | 宋洁心, 付天宇, 李凤鸣, 宋锐, 李贻斌. 基于延展性的机器人面料缝制张力预测方法[J]. 纺织学报, 2022, 43(12): 173-180. |
| [10] | 张洁, 徐楚桥, 汪俊亮, 郑小虎. 数据驱动的机器人化纺织生产智能管控系统研究进展[J]. 纺织学报, 2022, 43(09): 1-10. |
| [11] | 郑小虎, 刘正好, 陈峰, 刘志峰, 汪俊亮, 侯曦, 丁司懿. 环锭纺纱全流程机器人自动化生产关键技术[J]. 纺织学报, 2022, 43(09): 11-20. |
| [12] | 吴乐, 张倩, 杨万然, 徐朝月, 王维冠, 侯曦. 基于增强现实技术的筒子纱印染锁扣机器人运维巡检系统研究[J]. 纺织学报, 2022, 43(09): 34-40. |
| [13] | 屠佳佳, 孙磊, 毛慧敏, 戴宁, 朱婉珍, 史伟民. 圆纬机纱架自动换筒技术[J]. 纺织学报, 2022, 43(07): 178-185. |
| [14] | 陈小明, 李皎, 张一帆, 谢军波, 姚天磊, 陈利. 基于上位机的层间角联锁织物用织机开口控制系统设计[J]. 纺织学报, 2022, 43(04): 174-179. |
| [15] | 莫帅, 周长鹏, 李旭, 杨振宁, 刘辉华, 高瀚君. 机器人智能关节驱控结构一体化设计方法研究[J]. 纺织学报, 2022, 43(03): 160-167. |
|
||
 京公网安备11010502044800号
京公网安备11010502044800号