纺织学报 ›› 2024, Vol. 45 ›› Issue (11): 207-214.doi: 10.13475/j.fzxb.20230805201
任佳伟1, 周其洪1( ), 陈唱1, 洪巍2, 岑均豪2
), 陈唱1, 洪巍2, 岑均豪2
REN Jiawei1, ZHOU Qihong1(), CHEN Chang1, HONG Wei2, CEN Junhao2
摘要:
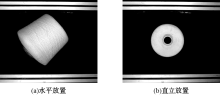
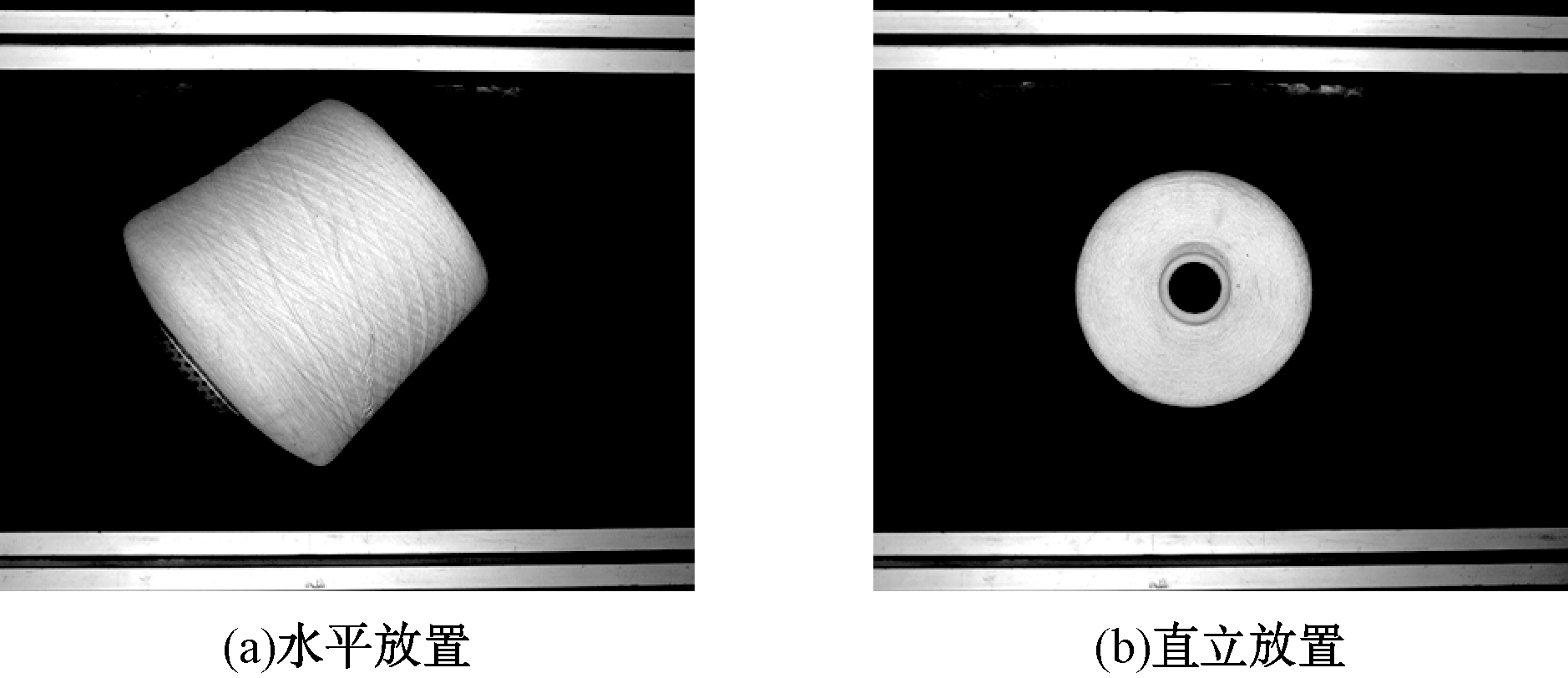
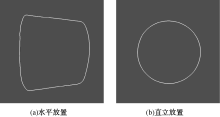
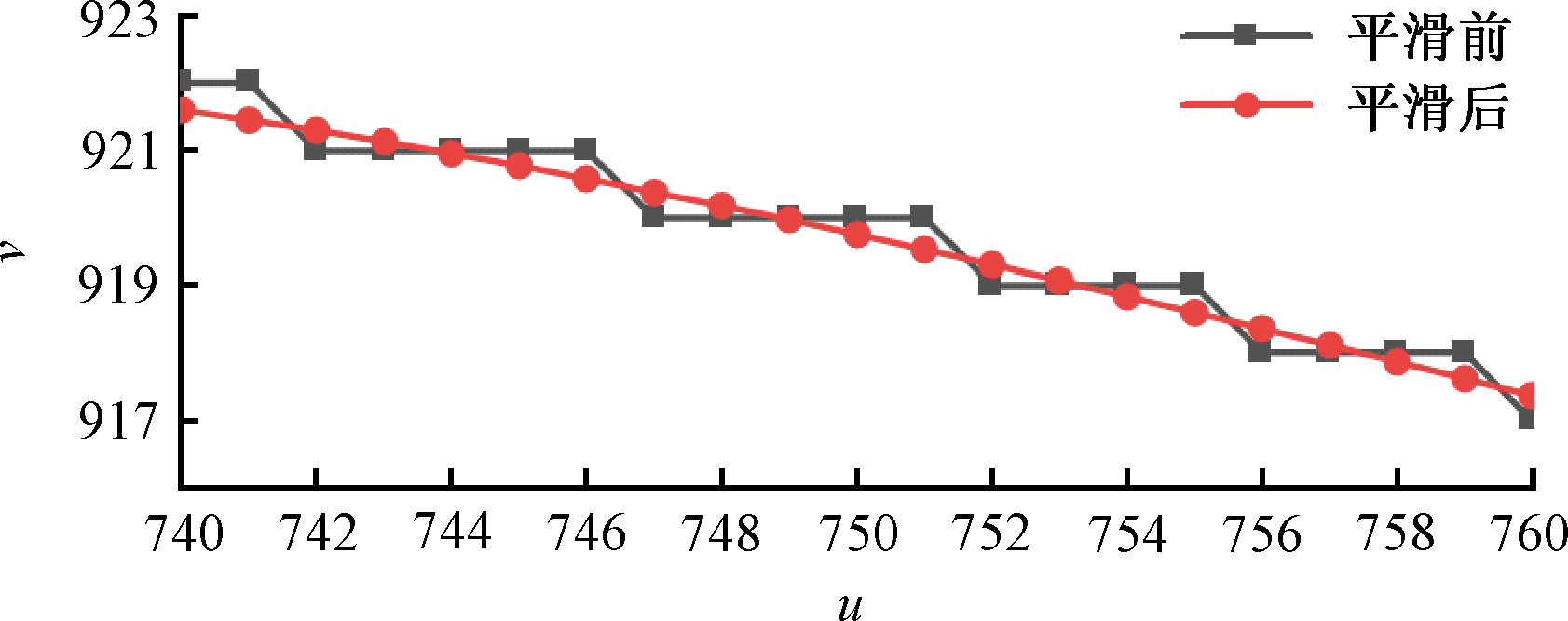
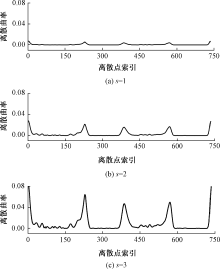
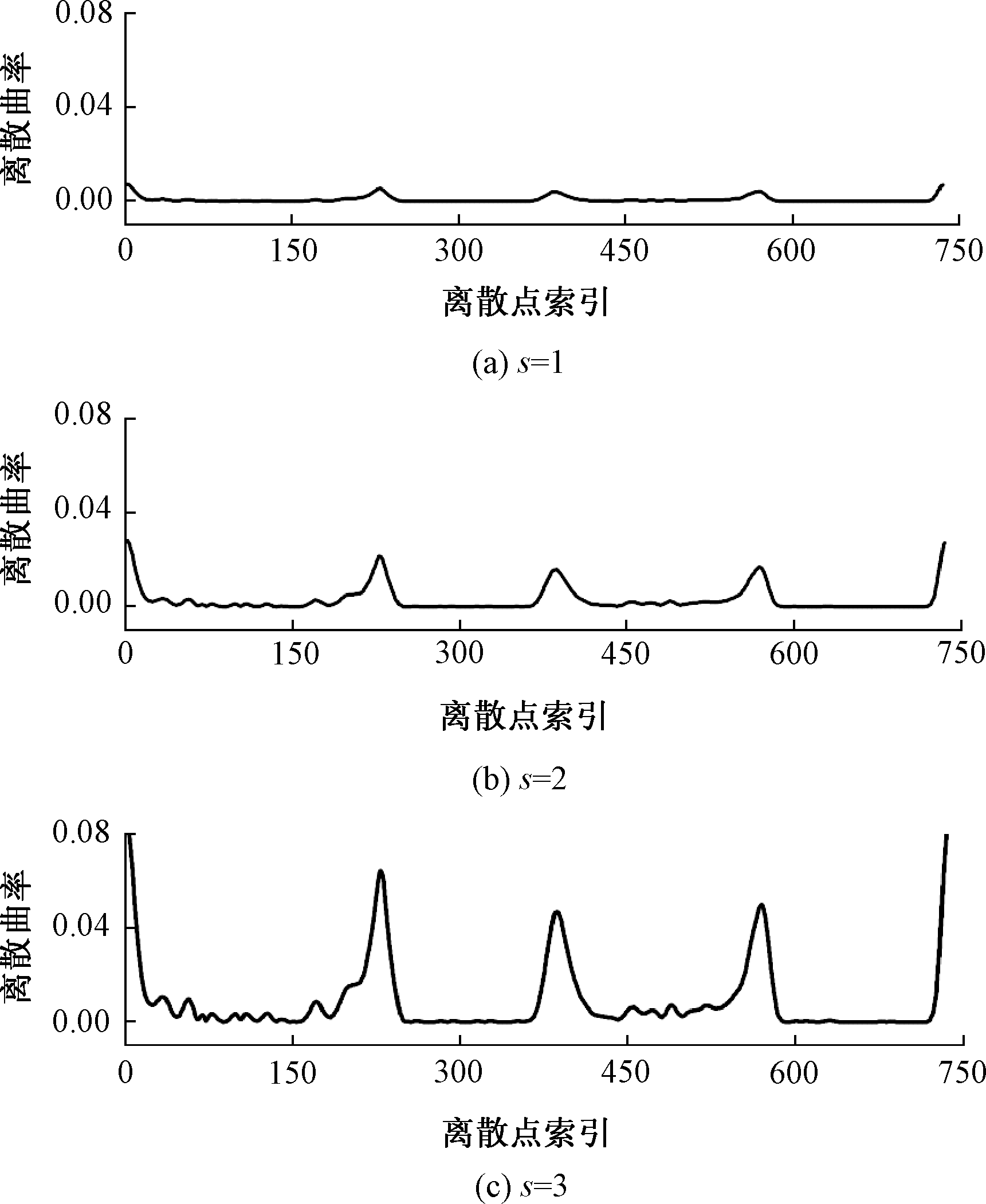
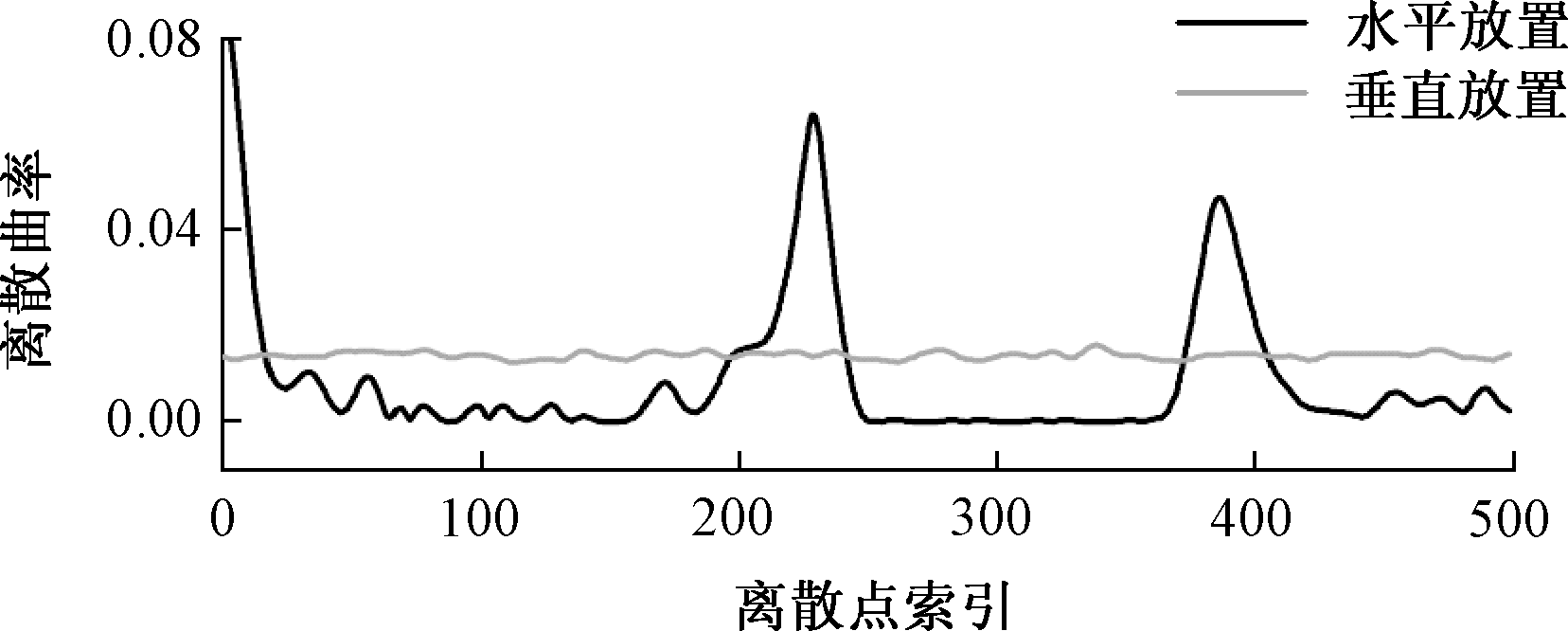
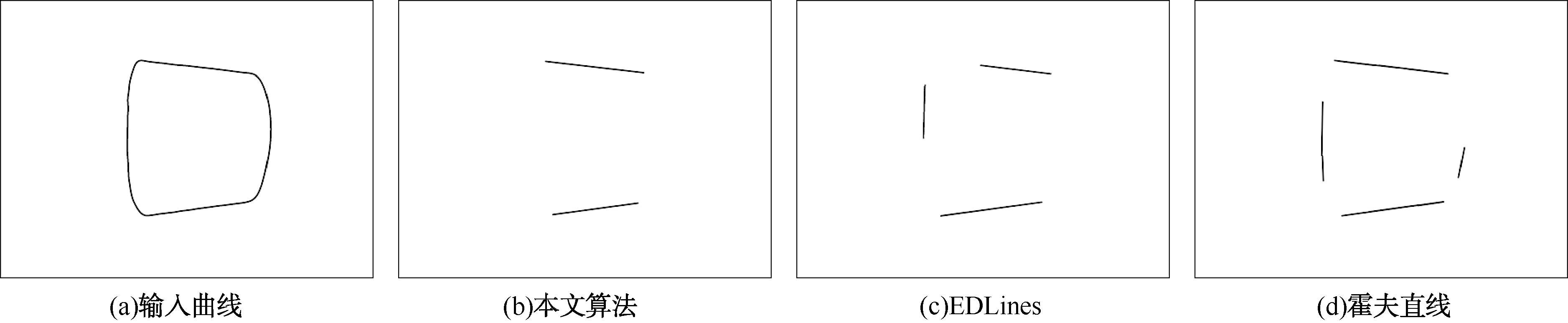
为解决机器人抓取传送带上筒子纱时筒子纱位姿识别困难的问题,提出一种基于机器视觉的筒子纱位姿检测方法。首先利用工业相机采集筒子纱的灰度图像,使用改进中值滤波对筒子纱图像进行预处理,再通过Canny边缘检测提取筒子纱的轮廓曲线并使用B样条曲线拟合对离散曲线进行平滑处理,然后计算离散曲线的曲率分布并判断放置状态,最后计算筒子纱中心点位置,使用基于曲率分布的直线检测算法提取筒子纱的边线并计算筒子纱轴线姿态角,以此得到筒子纱的位姿。以3种不同尺寸的筒子纱为对象进行位姿检测和抓取实验,结果表明,对不同尺寸的浅色筒子纱位姿检测准确率达到100%,可帮助机械臂实现对筒子纱的精准抓取。
中图分类号:
| [1] | 王蕾, 潘如如, 周建, 等. 机器视觉在纺织智能化中的应用进展[J]. 棉纺织技术, 2021, 49(11): 9-11. |
| WANG Lei, PAN Ruru, ZHOU Jian, et al. Application progress of machine vision in textile intellectuali-zation[J]. Cotton Textile Technology. 2021, 49(11): 9-11. | |
| [2] | 黄晨静, 张蕾, 孙逊, 等. 基于动力学模型的面料抓取机械臂轨迹跟踪控制方法[J]. 纺织学报, 2023, 44(6): 207-214. |
| HUANG Chenjing, ZHANG Lei, SUN Xun, et al. Trajectory tracking control method of cloth grabbing manipulator based on dynamic modeling[J]. Journal of Textile Research, 2023, 44(6): 207-214. | |
| [3] | 王勇, 陈荟西, 冯雨齐. 基于改进CenterNet的机械臂抓取检测[J]. 中南大学学报(自然科学版), 2021, 52(9): 3242-3250. |
| WANG Yong, CHEN Huixi, FENG Yuqi. Robotic grasping detection based on improved CenterNet[J]. Journal of Central South University (Science and Technology), 2021, 52(9): 3242-3250. | |
| [4] | 李会军, 瞿孝昌, 叶宾. 基于未知物体三维点云特征的机器人六自由度抓取[J]. 控制理论与应用, 2022, 39(6): 1103-1111. |
| LI Huijun, QU Xiaochang, YE Bin. Six-degree-of-freedom robot grasping based on three-dimensional point cloud features of unknown objects[J]. Control Theory & Applications, 2022, 39(6): 1103-1111. | |
| [5] | 马传旭, 张宁, 潘如如. 基于支持向量机的筒子纱纱管品种检测[J]. 纺织学报, 2023, 44(1): 194-200. |
| MA Chuanxu, ZHANF Ning, PAN Ruru, Detection of cheese yarn bobbin varieties based on support vector machine[J]. Journal of Textile Research, 2023, 44(1): 194-200. | |
| [6] | 张建新, 李琦. 基于机器视觉的筒子纱密度在线检测系统[J]. 纺织学报, 2020, 41(6): 141-146. |
| ZHANG Jianxin, LI Qi. Online cheese package yarn density detection system based on machine vision[J]. Journal of Textile Research, 2020, 41(6): 141-146. | |
| [7] | WANG Junru, SHI Zhiwei, SHI Weimin, et al. The Detection of yarn roll's margin in complex back-ground[J]. Sensors, 2023.DOI:10.3390/s23041993. |
| [8] | HAN Jinghai, LIU Bo, JIA Yongle. A new Kinect V2-based method for visual recognition and grasping of a yarn-bobbin-handling robot[J]. Micromachines, 2022, 13(6): 886. DOI:10.3390/mi13060886. |
| [9] | 刘博, 金守峰, 宿月文, 等. 堆叠筒子纱机器人无序分拣方法[J]. 轻工机械, 2022, 40(6): 14-21. |
| LIU Bo, JIN Shoufeng, SU Yuewen, et al. Robotic unordered sorting method for stacked bobbin yarns[J]. Light Industry Machinery, 2022, 40(6): 14-21. | |
| [10] | 李靖宇, 沈丹峰, 王玉, 等. 基于参数可调均值迁移滤波实现筒子纱的识别检测[J]. 轻工机械, 2021, 39(3): 63-68, 72. |
| LI Jingyu, SHEN Danfeng. WANG Yu, et al. Recognition and detection of cheese based on edge preserving filtering algorithm[J]. Light Industry Machinery, 2021, 39(3): 63-68, 72. | |
| [11] | 陈平, 李攀, 秦明辉. 筒子纱自动包装生产线控制系统设计[J]. 包装工程, 2021, 42(19): 282-286. |
| CHEN Ping, LI Pan, QIN Minghui. Design of automatic package production line control system for cheese yarn[J]. Package Engineering, 2021, 42(19): 282-286. | |
| [12] | 金守峰, 林强强, 马秋瑞. 基于对抗神经网络和神经网络模型的筒子纱抓取方法[J]. 毛纺科技, 2020, 48(1): 79-84. |
| JIN Shoufeng, LIN Qiangqiang, MA Qiurui. Method for grasping bobbin yarn based on generative adversarial network and neural network model[J]. Wool Textile Journal, 2020, 48(1): 79-84. | |
| [13] |
肖扬, 周军. 图像边缘检测综述[J]. 计算机工程与应用, 2023, 59(5): 40-54.
doi: 10.3778/j.issn.1002-8331.2209-0122 |
|
XIAO Yang, ZHOU Jun. Overview of image edge detection[J]. Computer Engineering and Applications, 2023, 59(5): 40-54.
doi: 10.3778/j.issn.1002-8331.2209-0122 |
|
| [14] | AKINLAR Cuneyt, TOPAL Cihan. EDLines: a real-time line segment detector with a false detection control[J]. Pattern Recognition Letters, 2011, 32(13): 1633-1642. |
| [1] | 任柯, 周衡书, 魏瑾瑜, 闫文君, 左言文. 基于机器视觉技术的百褶裙动态美感评价[J]. 纺织学报, 2024, 45(12): 189-198. |
| [2] | 周其洪, 陈唱, 任佳伟, 洪巍, 岑均豪. 基于改进凸包缺陷算法的扎带定位方法[J]. 纺织学报, 2024, 45(09): 212-219. |
| [3] | 陈育帆, 郑小虎, 徐修亮, 刘冰. 基于机器视觉的缝纫线迹缺陷检测方法[J]. 纺织学报, 2024, 45(07): 173-180. |
| [4] | 杨金鹏, 景军锋, 李吉国, 王渊博. 基于机器视觉的玻璃纤维合股纱缺陷检测系统设计[J]. 纺织学报, 2024, 45(05): 193-201. |
| [5] | 文嘉琪, 李新荣, 冯文倩, 李瀚森. 印花面料的边缘轮廓快速提取方法[J]. 纺织学报, 2024, 45(05): 165-173. |
| [6] | 白恩龙, 张周强, 郭忠超, 昝杰. 基于机器视觉的棉花颜色检测方法[J]. 纺织学报, 2024, 45(03): 36-43. |
| [7] | 葛苏敏, 林瑞冰, 徐平华, 吴思熠, 罗芊芊. 基于机器视觉的曲面枕个性化定制方法[J]. 纺织学报, 2024, 45(02): 214-220. |
| [8] | 史伟民, 韩思捷, 屠佳佳, 陆伟健, 段玉堂. 基于机器视觉的空纱筒口定位方法[J]. 纺织学报, 2023, 44(11): 105-112. |
| [9] | 周其洪, 韩伟龙, 陈鹏, 洪巍, 岑均豪. 基于灰色系统理论的筒子纱卷绕密度测量误差预测[J]. 纺织学报, 2023, 44(10): 60-67. |
| [10] | 陈泰芳, 周亚勤, 汪俊亮, 徐楚桥, 李冬武. 基于视觉特征强化的环锭纺细纱断头在线检测方法[J]. 纺织学报, 2023, 44(08): 63-72. |
| [11] | 陈罡, 金贵阳, 吴菁, 罗千. 智能服装缝制关键技术及成套装备研发[J]. 纺织学报, 2023, 44(08): 197-204. |
| [12] | 纪越, 潘东, 马杰东, 宋丽梅, 董九志. 基于机器视觉的弦振动纱线张力非接触检测系统[J]. 纺织学报, 2023, 44(05): 198-204. |
| [13] | 陶静, 汪俊亮, 徐楚桥, 张洁. 基于视觉校准的环锭纺细纱条干特征在线提取方法[J]. 纺织学报, 2023, 44(04): 70-77. |
| [14] | 马传旭, 张宁, 潘如如. 基于支持向量机的筒子纱纱管品种检测[J]. 纺织学报, 2023, 44(01): 194-200. |
| [15] | 王斌, 李敏, 雷承霖, 何儒汉. 基于深度学习的织物疵点检测研究进展[J]. 纺织学报, 2023, 44(01): 219-227. |
| Viewed | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
Full text 22
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
Abstract 58
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
Cited |
|
|||||||||||||||||||||||||||||||||||||||||||||||||
| Shared | ||||||||||||||||||||||||||||||||||||||||||||||||||
| Discussed | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
||
 京公网安备11010502044800号
京公网安备11010502044800号