Journal of Textile Research ›› 2024, Vol. 45 ›› Issue (05): 209-217.doi: 10.13475/j.fzxb.20230505401
• Machinery & Equipment • Previous Articles Next Articles
MA Zihong, CHEN Huimin, DING Mengmeng, YUE Xiaoli( )
)
CLC Number:
| [1] | 王芳. 智能制造在我国商务男装定制中的应用现状研究[D]. 深圳: 深圳大学, 2019:7-9. |
| WANG Fang. Research on the application status of intelligent manufacturing in mass customization in business men's wear in China[D]. Shenzhen: Shenzhen University, 2019:7-9. | |
| [2] | 刘立东, 李新荣, 刘汉邦, 等. 基于纬编针织物特性的静电吸附力模型[J]. 纺织学报, 2021, 42(3):161-168. |
| LIU Lidong, LI Xinrong, LIU Hanbang, et al. Electrostatic adsorption model based on the characteristics of weft knitted fabrics[J]. Journal of Textile Research, 2021, 42(3):161-168. | |
| [3] | MONKMAN G J, TAYLOR P M, FARNWORTH G J. Principles of electroadhesion in clothing robotics[J]. International Journal of Clothing Science and Technology, 1989, 1(3):14-20. |
| [4] | KOLLURU R, VALAVANIS K P, HEBERT T M. Modeling, analysis, and performance evaluation of a robotic gripper system for limp material handling[J]. IEEE Transactions on Systems, Man and Cybernetics, Part B (Cybernetics), 1998, 28(3):480-486. |
| [5] | MONKMAN G J, SHIMMIN C. Permatack adhesives for robot grippers[J]. Assembly Automation, 1991, 11(4):17-19. |
| [6] | STEPHAN J, SELIGER G. Handling with ice-the cryo-gripper, a new approach[J]. Assembly Automation, 1999, 19(4):332-337. |
| [7] | HIROYUKI Y, SOLVI A, KIMITOSHI Y. Unfolding of a rectangular cloth from unarranged starting shapes by a dual-armed robot with a mechanism for managing recognition error and uncertainty[J]. Advanced Robotics, 2017, 31(10):544-556. |
| [8] | FANTONI G, SANTOCHI M, DINI G, et al. Grasping devices and methods in automated production processes[J]. CIRP Annals, 2014, 63(2):679-701. |
| [9] | TAYLOR P M, TAYLOR G E. Sensory robotic assembly of apparel at Hull University[J]. Journal of Intelligent Robot System, 1992, 6:81-94. |
| [10] | LI X, KAGAWA T. Theoretical and experimental study of factors affecting the suction force of a bernoulli gripper[J]. Journal of Engineering Mechanics, 2014. DOI:10.1061/(ASCE)EM.1943-7889.0000774. |
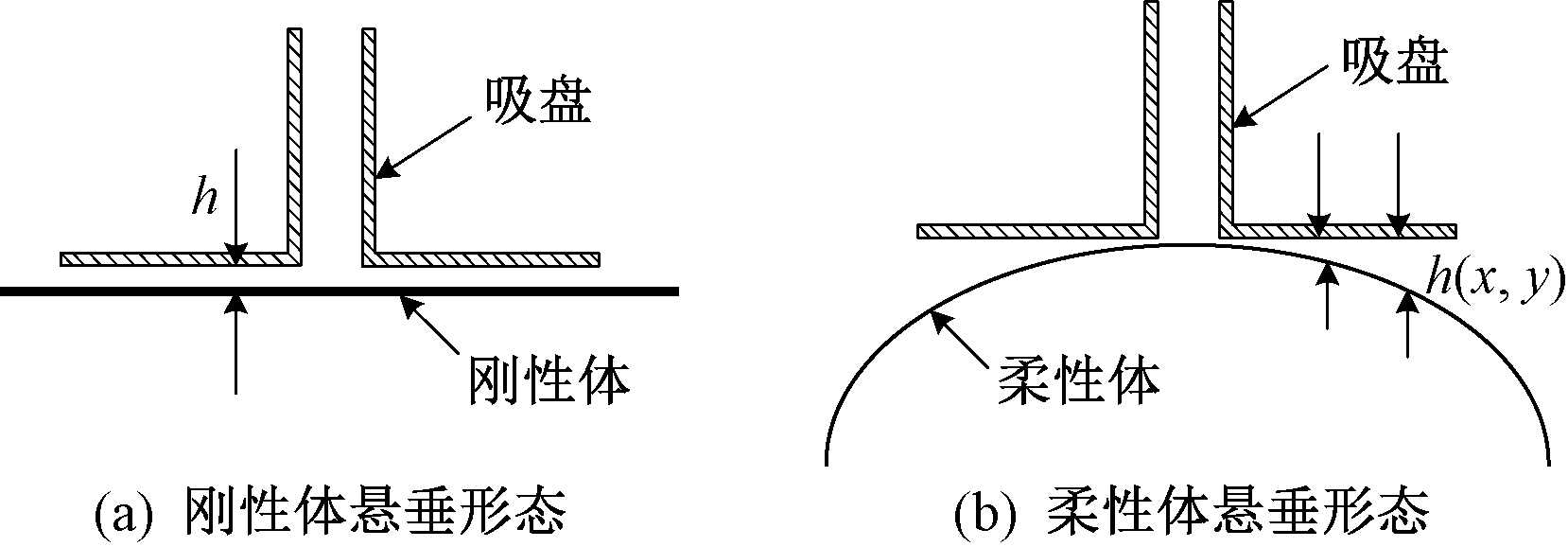
| [11] | BRUN X, MELKOTE S N. Effect of substrate flexibility on the pressure distribution and lifting force generated by a Bernoulli gripper[J]. Journal of Manufacturing Science and Engineering, 2012. DOI:10.1115/1.4007186. |
| [12] | LIU D, LIANG W, ZHU H, et al. Development of a distributed Bernoulli gripper for ultra-thin wafer handling[C]. IEEE International Conference on Advanced Intelligent Mechatronics(AIM), Munich, Germany, 2017. DOI:10.1109/AIM.2017.8014028. |
| [13] | RAWAL B R, PARE V, TRIPATHI K. Development of noncontact end effector for handling of bakery products[J]. The International Journal of Advanced Manufacturing Technology, 2007, 38(5/6):524-528. |
| [14] | DAVIS S, GRAY J O, CALDWELL D G. An end effector based on the Bernoulli principle for handling sliced fruit and vegetables[J]. Robotics and Computer-Integrated Manufacturing, 2008, 24(2):249-257. |
| [15] | ERTÜRK Ş, SAMTA Ş G. Design of grippers for laparoscopic surgery and optimization of experimental parameters for maximum tissue weight holding capa-city[J]. Bulletin of the Polish Academy of Sciences: Technical Sciences, 2019, 67(6):1125-1132. |
| [16] | ERTÜRK Ş, ERZINCANLI F. Design and development of a non-contact robotic gripper for tissue manipulation in minimally invasive surgery[J]. Acta Bio-medica: Atenei Parmensis, 2020. DOI: 10.23750/abm.v91i3.8129. |
| [17] | SAVKIV V, MYKHAILYSHYN R, MARUSCHAK P, et al. Gripping devices of industrial robots for manipulating offset dish antenna billets and controlling their shape[J]. Transport, 2021, 36(1):63-74. |
| [18] | STÜHM K, TORNOW A, SCHMITT J, et al. A novel gripper for battery electrodes based on the Bernoulli-principle with integrated exhaust air compensation[J]. Procedia CIRP, 2014, 23:161-164. |
| [19] | OZCELIK B, ERZINCANLI F. A non-contact end-effector for the handling of garments[J]. Robotica, 2002, 20(4):447-450. |
| [20] | OZCELIK B, ERZINCANLI F. Examination of the movement of a woven fabric in the horizontal direction using a non-contact end-effector[J]. The International Journal of Advanced Manufacturing Technology, 2004, 25(5/6):527-532. |
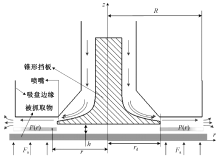
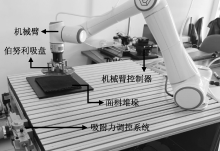
| [21] | 何帆, 孟婥, 张豪, 等. 基于伯努利吸盘吸附经编鞋面稳态过程的研究[J]. 东华大学学报(自然科学版), 2022, 48(1):79-84. |
| HE Fan, MENG Zhuo, ZHANG Hao, et al. Study on the steady-state of grasping warp knit uppers based on Bernoulli gripper[J]. Journal of Donghua University (Natural Science Edition), 2022, 48(1):79-84. | |
| [22] | FEYNMAN C. Modeling the appearance of cloth[D]. Britain: Cambridge, Massachusetts Inst of Technology, 1986:6-14. |
| [23] | 程银水, 朱锜. 正交各向异性矩形薄板弯曲问题解析解的一般格式[J]. 北京建筑工程学院学报, 1991(1): 9-18. |
| CHEN Yinshui, ZHU Qi. General format for analytical solutions of bending problems of orthotropic rectangular thin plates[J]. Journal of Beijing Institute of Civil Engineering and Architecture, 1991(1): 9-18. | |
| [24] | 杨鑫. 面料非接触拾取数值模拟研究[D]. 上海: 东华大学, 2023:28-33. |
| YANG Xin. Numerical simulation study on non-contact pickup of fabric[D]. Shanghai: Donghua University, 2023:28-33. | |
| [25] | ERGUN S. Fluid flow through packed columns[J]. Chemical Engineering Progress, 1952, 2(48): 89-94. |
| [26] | 邱茂伟, 王府梅. 机织物透气性能的预测研究[J]. 纺织学报, 2005, 26(4): 73-75. |
| QIU Maowei, WANG Fumei. Prediction of air permeability of woven fabrics[J]. Journal of Textile Research, 2005, 26(4):73-75. | |
| [27] | 张立奎. 矩形风管的当量直径[J]. 环境工程, 2014, 32(S1):975-978. |
| ZHANG Likui. Rectangular duct-s equivalent diameter[J]. Environmental Engineering, 2014, 32(S1):975-978. |
| [1] | . Effect of Laval tube structure on performance of yarn suction gun for FDY [J]. JOURNAL OF TEXTILE RESEARCH, 2014, 35(5): 122-0. |
|
||